使包含驱动单元和制动装置的车辆停车的方法及执行这种方法的车辆与流程
1.本发明涉及一种用于车辆的自主制动的方法,该车辆包含:驱动单元,通过该驱动单元可以将扭矩引入到车辆的传动系统中;以及制动装置,通过该制动装置在提供所产生的制动力矩t
brake
(t)的情况下可以使车辆减速,其中提供了用于确定车辆的瞬时速度v(t)的装置,其中为了使车辆制动到可预定义的极限速度v
threshold
,以下,借助于控制单元增加制动力矩t
brake
(t)。
2.例如在德国公开文献de 10 2017 204 639 a1中描述了这种方法。
3.本发明还涉及一种用于执行这种方法的车辆。
背景技术:
4.所述类型的驱动单元原则上可以是用于驱动车辆(特别是内燃机)的任何扭矩源。在本发明的上下文中,术语“内燃机”包括汽油发动机和柴油发动机,但也包括利用混合燃烧过程的混合内燃机以及混合驱动装置,混合驱动装置除了内燃发动机之外还包括用于驱动机动车辆的至少一个另外的扭矩源,例如为驱动目的而被连接或可以被连接至内燃发动机的电机,该另外的扭矩源作为内燃发动机的替代或补充输出动力。
5.现代车辆具有制动系统,即,自主或部分自主操作的制动装置,以制动车辆并且控制车辆速度。自主操作的制动系统被用于自主驾驶的车辆中,在这种情况下,驾驶员不可能或仅有非常有限的可能性来影响由车辆执行的驾驶操纵。尽管驾驶员坐在控制装置处,但在某些驾驶情况下,部分自主操作的制动系统可以启动制动操纵,而无需驾驶员积极参与。这样的例子是自适应巡航控制系统,在该系统中,通过有针对性的制动干预来与前一车辆保持特定距离。在避免碰撞的系统中,在预计会与物体(尤其是车辆)发生碰撞的情况下,自动启动制动。部分自主操作的制动系统的进一步应用是拥塞辅助系统,在该系统中,驾驶员既不需要使车辆加速也不需要将车辆制动到特定车辆速度以下,特别是在交通队列中。此外,制动系统在驻车辅助系统中自主地致动,该驻车辅助系统自动将车辆操纵到停车位或车库中。车辆的自主或部分自主停车的另一示例是作为驻车的准备措施的车辆的精确定位,以便于或允许驾驶员进行随后的驻车操纵。
6.在这种情况下,在本发明的上下文中,将车辆的自主和部分自主停车和制动统一地描述为车辆的自主停车和制动。
7.出于舒适性考虑,尽可能地减小或消除驾驶员经常感觉到的吱吱作响的制动噪声。出于这个原因,原则上目的是将制动过程构造得尽可能短,但是出于舒适性的原因,驾驶员倾向于轻柔的制动。折衷是必要的。
8.装配在现代车辆上的根据现有技术的制动系统通常是液压或气动操作的。这样的制动系统对加压介质的压力控制相对不完善,结果是它们只能以最小制动力矩操作,该最小制动力矩或多或少地明显偏离0nm。取决于制动系统,最小制动力矩在30nm至50nm之间。如果需要低于该制动力矩的制动力矩,则制动系统不会反应。这导致这样的情况,即,即使
较小的制动力矩足以制动,但是由于必须使用至少最小制动力矩,所以只能相对急剧地制动低速行驶的车辆。此外,即使已经启动制动过程,也会出现车辆继续滚动特定时间的情况,这出于安全原因是有问题的。
9.除了舒适性损失之外,还有与此相关的其他缺点。如上所述,车辆的瞬时速度对于制动和所提供的制动力矩起着非常重要的作用。车辆的速度例如可以利用增量发射器来确定。这些产生信号,信号然后传递到控制单元,控制单元又根据确定的车辆速度来致动制动系统。在许多情况下,所涉及的车辆的控制单元使用所谓的pi(比例积分)控制器,pi控制器包括比例元件和积分元件。pi控制器是线性控制概念的一部分,其中液压或气动操作的制动系统的上述特性——仅在特定制动压力以上才起作用的特性——导致尽管有积分元件但通过pi控制器难以控制的不确定性。由于pi控制器是恒定控制器,因此在低速时,即使车辆正在行驶,增量发射器在特定时间内也不会产生速度信号,因此pi控制器不再具有参考变量并且不知道车辆是否正在行驶。例如,如果要将自主行驶的车辆驶入车库或停车位,则可能会发生以下情况:即使为了到达指定位置应以低速行驶,车辆仍在到达指定位置(标称位置)之前停车。在这种情况下,控制单元释放制动器,并且在随后以上述最小制动力矩再次制动之前,使车辆加速。这导致加速和制动过程的不期望的连续。如果车辆由于外部影响(例如阵风)或由于停车位的坡度而加速,则加速和制动过程的这种连续性可能会进一步放大。另一点是,在从高车辆速度过渡到低车辆速度(以下将称为蠕变速度)时,摩擦力(尤其是车辆的车轮与地面之间的摩擦力)从动态行为转变为静态行为,从而使车辆动力学变化并且制动过程的控制变得更加困难。
10.在德国公开文献de 10 2017 204 639 a1中描述了解决上述问题的方法。在车辆的速度低于极限值的情况下,通过用于制动低速行驶的车辆的控制单元,首先增加传递至传动系统的驱动扭矩,然后增加作用在车轮上的制动力矩。
技术实现要素:
11.在上述背景下,本发明的目的是提出一种根据权利要求1的前序部分的方法,通过该方法,低速行驶的车辆的自主制动得以改善。
12.本发明的另一个目的是提供一种用于执行这种方法的车辆。
13.第一个目的通过一种用于车辆的自主制动的方法来实现,该车辆包括:驱动单元,通过该驱动单元可以将扭矩引入到车辆的传动系统中;以及制动装置,通过该制动装置,可以在提供所产生的制动力矩t
brake
(t)的情况下使车辆减速,其中提供了用于确定车辆的瞬时速度v(t)的装置,其中为了将车辆制动到可预定义的极限速度v
threshold
以下,通过控制单元增加制动力矩t
brake
(t),其特征在于,一旦检测到车辆的瞬时速度v(t)低于预定义的极限速度v
threshold
,就将制动力矩t
brake
(t)以梯度dt
brake
(t)/dt=k1线性增加,其中k1为常数。
14.在车辆速度v(t)低于预定义的极限速度v
threshold
的情况下,根据本发明的制动方法使车辆减速。通过控制单元以恒定的梯度dt
brake
(t)/dt=k1连续增加制动力矩t
brake
(t)。
15.根据本发明,制动的过程确保了轻柔而又快速的制动。该控制系统相对不复杂,即简单,因为没有考虑车辆的瞬时操作参数,例如速度、加速度或——在使用内燃发动机机作为驱动单元的情况下——当前接合的挡位。
16.根据本发明的方法改善了低速行驶的车辆的自主制动。因此,根据本发明的方法
实现了本发明的第一个目的。
17.结合从属权利要求说明根据本发明的方法的其他有利实施例。
18.该方法通过制动使车辆停车的实施例是有利的。
19.该方法变型例如用作驻车的准备措施,特别是用于在驻车之前精确地定位车辆。因此,易于驾驶员进行随后的驻车操纵,或者准备好或启动车辆的自出驻车。
20.另一个应用是走走停停的交通,例如在高速公路和主干道的交通队列中出现。在市区交通中,走走停停的交通不再是例外,而是因为交通信号灯不协调以及交通量的增加而成为规则。另外的应用是门控交叉口等。
21.该方法的以下实施例是有利的:在该实施例中,在开始制动过程时,最初作用在车辆上的制动力、驱动力和惯性力之间实现力平衡。
22.在满足该条件的情况下,根据本发明的方法特别准确地起作用,即具有最小的偏差或最小的误差。
23.然而,在开始制动过程时车辆的速度v(t)高于最初假定的速度的情况下,或者在制动过程中车辆以a(t)>0加速的情况下,为了考虑这些特殊情况,除了线性增加外,将制动力矩增加额外的量是有利的。
24.因此,该方法的以下实施例是有利的:在该实施例中,制动力矩t
brake
(t)最初增加量(dt
brake
(t)/dt)2,其中(dt
brake
(t)/dt)2=k2*v(t),使得dt
brake
(t)/dt=k1+k2*v(t),其中k2为常数。
25.在这种情况下,该方法的以下实施例是有利的:在该实施例中,在制动过程开始时车辆的速度v(t)高于最初检测到的速度的情况下,仅将制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)2。
26.在这种情况下,该方法的以下实施例也是有利的:在该实施例中,在制动过程开始时车辆的速度v(t)高于预定义的极限速度v
threshold
的情况下,仅将制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)2。
27.另外,该方法的以下实施例是有利的:在该实施例中,制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)3,其中(dt
brake
(t)/dt)3=k3*a(t),因此dt
brake
(t)/dt=k1+k3*a(t),其中k3为常数,而a(t)为车辆的瞬时加速度a(t)。
28.该方法的以下实施例也是有利的:在该实施例中,制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)3,其中(dt
brake
(t)/dt)3=k3*a(t),使得dt
brake
(t)/dt=k1+k3*a(t),其中k3为常数,而a(t)是车辆的瞬时加速度a(t)。
29.在这种情况下,该方法的以下实施例是有利的:在该实施例中,在制动时车辆以a(t)>0加速的情况下,仅将制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)3。
30.该方法的以下实施例是有利的:在该实施例中,借助于闭环控制系统来控制车辆的速度v(t)高于预定义的极限速度v
threshold
。
31.第二个目的(即提供一种用于执行上述类型的方法的车辆)是通过一种车辆实现的,该车辆包括:驱动单元,通过该驱动单元可以将扭矩引入车辆的传动系统中;以及制动装置,通过该制动装置可以在提供所产生的制动力矩t
brake
(t)的情况下使车辆减速,该车辆具有用于确定车辆的瞬时速度v(t)的装置和用于将车辆自主制动到可预定义的极限速度v
threshold
以下的控制单元,并且其特征在于,控制单元被配置为使得一旦检测到车辆的瞬时
速度v(t)低于预定义的极限速度v
threshold
,,就以梯度(dt
brake
(t)/dt)1=k1线性增加制动力矩t
brake
(t),其中k1为常数。
32.上面关于根据本发明的方法所作的陈述也适用于根据本发明的车辆,因此这里总体参考关于方法变型所作的陈述。
33.车辆的以下实施例是有利的:在该实施例中,控制单元被配置为使得制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)2,其中(dt
brake
(t)/dt)2=k2*v(t),使得dt
brake
(t)/dt=k
1+
k2*v(t),其中k2为常数。
34.在这种情况下,车辆的以下实施例是有利的:在该实施例中,控制单元被配置为使得制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)3,其中(dt
brake
(t)/dt)3=k3*a(t),使得dt
brake
(t)/dt=k
1+
k2*v(t)+k3*a(t),其中k3为常数,而a(t)为车辆的瞬时加速度a(t)。
35.车辆的以下实施例也是有利的:在该实施例中,控制单元被配置为使得制动力矩t
brake
(t)额外地增加量(dt
brake
(t)/dt)3,其中(dt
brake
(t)/dt)3=k3*a(t),使得dt
brake
(t)/dt=k1+k3*a(t),其中k3为常数,而a(t)为车辆的瞬时加速度a(t)。
36.车辆的以下实施例是有利的:在该实施例中,控制单元是发动机控制系统的一部分。
附图说明
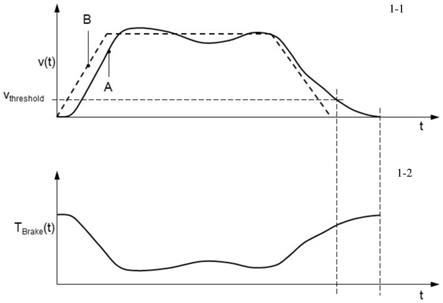
37.下面参考图1中的两个图来说明本发明。其中:
38.图1
‑
1示出了随时间t变化的车辆速度v(t);以及
39.图1
‑
2示出了随时间t变化的制动力矩t
brake
(t)。
具体实施方式
40.图1
‑
1示出了随时间t变化的车辆速度v(t),其中时间t在横坐标上示出并且车辆速度v(t)在纵坐标上示出。
41.同时显示了实际速度曲线(曲线a)和标称速度曲线(曲线b)。
42.图1
‑
2示出了随时间t变化的制动力矩t
brake
(t),其中时间t在横坐标上示出并且制动力矩t
brake
(t)在纵坐标上示出。
43.如果瞬时车辆速度v(t)达到预定义的极限速度v
threshold
,,则为了制动车辆,通过控制单元增加制动力矩t
brake
(t)。
44.在当前情况下,制动力矩t
brake
(t)不仅线性地增加,而且额外地增加另外的量。
45.附图标记列表
46.a(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆加速度
47.k1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
常数,第一常数
48.k2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
常数,第二常数
49.k3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
常数,第三常数
50.t
brake
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀ
制动力矩,随时间变化的制动力矩
51.(dt
brake
(t)/dt)
1 第一梯度
52.(dt
brake
(t)/dt)
2 第二梯度,额外的量
53.(dt
brake
(t)/dt)
3 第三梯度,额外的量
54.t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
时间
55.v(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
车辆速度
56.v
threshold
ꢀꢀꢀꢀꢀꢀꢀꢀ
可预定义的极限速度
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1