一种汽车袋装物料装卸设备的制作方法
[0001]
本实用新型涉及一种袋装物料装卸设备,具体涉及一种向无顶棚汽车上装卸袋装物料的设备。
背景技术:
[0002]
目前,在袋装物料装卸车作业时,一般采用输送皮带机配合人工的方式进行。装车时,输送皮带机将袋装物料输送到汽车上,人工将袋装物料堆放整齐;卸车时,人工将袋装物料从汽车上搬运到输送皮带机上,输送皮带机再将袋装物料输送到指定位置,在装卸过程中,人工劳动强度大,工作环境恶劣。现有技术中具有将成垛或单个袋装物料堆放在汽车上到设备,但此类堆放设备通常是固定在原地,无法自由移动,不能适应装料汽车自由停放的需求,堆放过程中需要人工进行监督干预;另外,这些设备不能将无规则堆放的袋装物料从汽车上卸下。
技术实现要素:
[0003]
本实用新型的目的是为了克服上述现有袋装物料装卸方式的不足,提供一种汽车袋装物料装卸设备,能够自由移动且能够实现汽车袋装物料自动装卸。
[0004]
为实现上述目的,本实用新型采用如下技术方案:一种汽车袋装物料装卸设备,包括卡车底盘、底座、升降支架、悬臂、抓料机构、扫描模块、皮带机和动力系统,所述底座由底座支架和底座导轨、底座齿条组成,底座支架固定于卡车底盘上,底座导轨固定在底座支架上部两侧,底座齿条布置在底座支架上部,所述底座上布置有升降支架,升降支架由下支架、上支架、走行电机机构、升降油缸、回转支承和走行齿轮组成,所述升降支架的下支架布置在底座导轨上,走行电机机构固定在下支架上,上支架套装在下支架上,升降油缸一端固定在下支架上,另外一端固定在上支架上,回转支承固定在上支架上部,在升降油缸的驱动下,上支架和回转支承可相对于下支架上下移动,走行电机机构下部固定有走行齿轮,走行齿轮和底座齿条形成齿条齿轮副,在走行电机机构带动下,升降支架可在底座导轨上来回移动,所述升降支架回转支承上布置有悬臂,所述悬臂由悬臂架、驱动机构和悬臂导轨组成,所述悬臂架上布置有用于扫描袋装物料堆放状态的扫描模块,悬臂架的两侧都固定有悬臂导轨,悬臂导轨上布置有用于抓取袋装物料的抓料机构,悬臂架上固定有用于带动抓料机构移动的驱动机构,升降支架的回转支承带动悬臂在水平面内转动,所述底座上还布置有皮带机,所述卡车底盘上还布置有动力系统。
[0005]
在上述技术方案中,所述抓料机构由安装座、卷扬机、伸缩导杆、定滑轮、回转减速机和抓取模块组成,安装座固定在悬臂导轨的滑块上,同时安装座与悬臂上的驱动机构相连,卷扬机固定在安装座上,卷扬机钢丝绳一端绕过定滑轮固定在回转减速机上,伸缩导杆固定在安装座上,伸缩导杆下部固定在回转减速机上,抓取模块固定在回转减速机下部,在卷扬机驱动和回转减速机、抓取模块自重以及伸缩导杆的导向作用下,回转减速机和抓取模块可在竖直面内上下移动。
[0006]
在上述技术方案中,所述扫描模块固定在悬臂架上,用于扫描汽车内袋装物料堆放状态。
[0007]
在上述技术方案中,所述皮带机固定在底座支架上方,用于接收抓料机构抓取来的袋装物料,也可将其他设备输送来的袋装物料输送到抓取机构下方。
[0008]
在上述技术方案中,所述卡车底盘采用成熟的带有司机室的底盘,操作方便,行动灵活。
[0009]
在上述技术方案中,所述动力系统固定在卡车底盘上,位于底座支架内部,动力系统由发电机组和液压站组成,用于给设备提供动力和液压源。
[0010]
本实用新型与现有技术对比,充分显示其优越性在于:一方面,通过将各执行模块集成在卡车底盘上,实现了袋装物料装卸设备的灵活移动,适应不同位置装卸袋装物料的需求;另一方面,通过特有的悬臂和抓取模块结构,既具备了将袋装物料整齐的堆放到汽车上的功能,也能够抓取无规则堆放在汽车上的袋装物料。
附图说明
[0011]
图1是本实用新型设备收车状态下的等轴测结构示意图。
[0012]
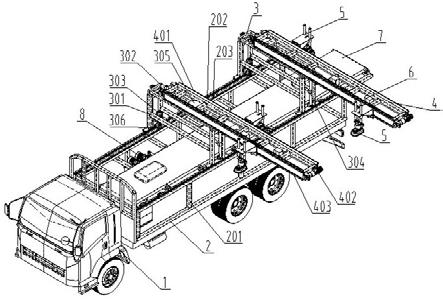
图2是本实用新型设备作业状态下的等轴测结构示意图一。
[0013]
图3是本实用新型设备作业状态下的等轴测结构示意图二。
[0014]
图4是本实用新型设备装料作业状态下与待装料汽车、输送皮带机配合的等轴测结构示意图(袋装物料装车过程)。
[0015]
图5是本实用新型设备卸料作业状态下与待卸料汽车、输送皮带机配合的等轴测结构示意图(袋装物料卸车过程)。
[0016]
图中,卡车底盘1,底座2,底座支架201,底座导轨202,底座齿条203,升降支架3,下支架301,上支架302,走行电机机构303,升降油缸304,回转支承305,走行齿轮306,悬臂4,悬臂架401,驱动机构402,悬臂导轨403,抓料机构5,安装座501,卷扬机502,伸缩导杆503,定滑轮504,回转减速机505,抓取模块506,扫描模块6,皮带机7,动力系统8,发电机组801,液压站802,输送皮带机901,待装料汽车902,待卸料汽车903。
具体实施方式
[0017]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施的限制。
[0018]
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
[0019]
除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本实用新型。本文所使用的术语“及/ 或”包
括一个或多个相关的所列项目的任意的和所有的组合。
[0020]
下面结合附图及实施例对本实用新型作进一步的详细描述。
[0021]
如图1至图5所示,本实用新型实施例提供一种汽车袋装物料装卸设备,包括卡车底盘1、底座2、升降支架3、悬臂4、抓料机构5、扫描模块6、皮带机7和动力系统8。
[0022]
上述卡车底盘1为通用型卡车底盘,可以像普通卡车一样驾驶、制动、驻车。
[0023]
上述底座2由底座支架201和底座导轨202、底座齿条203组成,底座支架201通过螺栓固定在卡车底盘1上,底座支架201上部两侧各固定有一条底座导轨202,底座支架201上方还固定有一条底座齿条203。
[0024]
上述升降支架3由下支架301、上支架302、走行电机机构303、升降油缸304、回转支承305和走行齿轮306组成,下支架301分别与底座导轨202的滑块连接,上支架302套装在下支架301上,下支架301上还固定有走行电机机构303,升降油缸304一端固定在下支架301上,另外一端固定在支架302上,两条升降油缸304分布于下支架301和上支架302两侧,回转支承305固定在上支架302上部,走行齿轮306固定在走行电机机构303下部,走行齿轮306和底座齿条203形成齿轮齿条副,在走行电机机构303驱动下,走行齿轮306带动升降支架3沿着底座导轨202在底座2上来回移动,在两条升降油缸304的驱动下,上支架302和回转支承305可相对于下支架301上下移动,底座导轨202上布置有两套升降支架3。
[0025]
上述悬臂4由悬臂架401、驱动机构402和悬臂导轨403组成,悬臂架401连接在回转支承305上,在回转支承305的带动下,悬臂4可在水平面内转动,悬臂架401的两侧都固定有悬臂导轨403,悬臂架401上固定有驱动机构402,驱动机构402采用同步带型式,每个升降支架3上各布置一套悬臂4。
[0026]
上述抓料机构5连接在悬臂导轨403的滑块上,抓料机构由安装座501、卷扬机502、伸缩导杆503、定滑轮504、回转减速机505和抓取模块506组成,安装座501与悬臂导轨403的滑块连接,同时安装座501与驱动机构402相连(安装座固连在同步带上),在驱动机构402的带动下,抓料机构5可沿悬臂导轨403在悬臂4上来回移动,卷扬机502和定滑轮504固定在安装座501上,卷扬机502钢丝绳一端绕过定滑轮504定滑轮与回转减速机505连接,伸缩导杆503采用成熟的产品结构,由内筒、中筒和外筒套装组成,外筒固定在安装座501上,内筒下部固定在回转减速机505上,抓取模块506固定在回转减速机505下方,回转减速机505可带动抓取模块506旋转,卷扬机502转动,带动回转减速机505和抓取模块506上下移动,伸缩导杆503可保证回转减速机505和抓取模块506上下移动过程中不发生摆动,抓取模块506采用成熟的吸盘模式对袋装物料进行吸取,主要由吸盘、风管和风机三部分组成,每个悬臂4上布置两套抓料机构5。
[0027]
上述扫描模块6固定在悬臂架401上,扫描模块6采用成熟的双目立体视觉系统对袋装物料进行三维定位,获取袋装物料在汽车上的堆放模型,每个悬臂4上布置一套扫描模块6。
[0028]
上述皮带机7固定在底座支架201上方,位于升降支架3下方,用于接收抓料机构5抓取来的袋装物料,也可将其它设备输送来的袋装物料输送到指定位置,供抓料机构5抓取。
[0029]
上述动力系统8固定在卡车底盘1上,位于底座支架201内部,动力系统8由发电机组801和液压站802组成,用于给本实用新型的设备提供动力和液压源。
[0030]
本实用新型进行装卸料作业过程中,需要其它输送皮带机901与本设备的皮带机7配合,将袋装物料输入到皮带机7上或者将皮带机7上的袋装物料输送走。
[0031]
本实用新型的袋装物料装车过程如下:
[0032]
1、司机将本实用新型设备驾驶至待装料汽车902旁边,驻车停稳;
[0033]
2、如图4所示,输送皮带机901与本设备皮带机7对接,输送皮带机901位于皮带机7上方;
[0034]
3、两升降支架3带动悬臂4、抓料机构5和扫描模块6升起;
[0035]
4、两回转支承305先后带动悬臂4、抓料机构5和扫描模块6旋转,直至悬臂4与待装料汽车902垂直;
[0036]
5、两扫描模块6分别对待装料汽车902的车厢进行扫描,获得袋装物料堆放情况;
[0037]
6、输送皮带机901将袋装物料输送到皮带机7上;
[0038]
7、皮带机7将袋装物料往卡车底盘1司机室方向输送,等待抓取机构5吸取;
[0039]
8、抓取机构5移动到待抓取的袋装物料上方,卷扬机502转动,回转减速机505和抓取模块506依靠自重下移到指定高度,必要时回转减速机505驱动抓取模块506回转,使抓取模块506的吸盘贴合在袋装物料中部,风机启动,吸盘吸住袋装物料,卷扬机502转动,带动回转减速机和抓取模块506上移到指定高度;
[0040]
9、根据袋装物料堆放模型,驱动机构402通过同步带带动抓取机构5和袋装物料移动到待装料汽车902上方,抓取模块506将袋装物料放在待装料汽车902指定位置;
[0041]
10、若待装料汽车902车厢较短,重复上述步骤5-9,本实用新型设备可一次性将待装料汽车902装满;
[0042]
11、若待装料汽车902车厢较长,本实用新型设备将覆盖范围内的待装料汽车902装满后,将待装料汽车902移动一次,使未装料部分置于本实用新型设备覆盖范围内,重复上述步骤5-9,即可将待装料汽车902装满。
[0043]
本实用新型的袋装物料卸车过程如下:
[0044]
1、司机将本实用新型设备驾驶至待卸料汽车903旁边,驻车停稳;
[0045]
2、如图5所示,输送皮带机901与本实用新型设备皮带机7对接,输送皮带机901位于皮带机7下方;
[0046]
3、两升降支架3带动悬臂4、抓料机构5和扫描模块6升起;
[0047]
4、两回转支承305先后带动悬臂4、抓料机构5和扫描模块6旋转,直至悬臂4与待装料汽车902垂直;
[0048]
5、两扫描模块6分别对待装料汽车902的车厢进行扫描,获得袋装物料堆放情况;
[0049]
6、根据袋装物料堆放模型,抓取机构5先后移动到待抓取的袋装物料上方,卷扬机502转动,回转减速机505和抓取模块506依靠自重下移到指定高度,必要时回转减速机505驱动抓取模块506回转,使抓取模块506的吸盘贴合在袋装物料中部,风机启动,吸盘吸住袋装物料,卷扬机502转动,带动回转减速机和抓取模块506上移到指定高度;
[0050]
7、驱动机构402通过同步带带动抓取机构5和袋装物料移动到皮带机7上方,抓取模块506将袋装物料放在皮带机7上;
[0051]
8、皮带机7将袋装物料输送到输送皮带机901上;
[0052]
9、若待卸料汽车903车厢较短,重复上述步骤5-8,本实用新型设备可一次性将待
卸料汽车903上的袋装物料卸完;
[0053]
10、若待卸料汽车903车厢较长,本实用新型设备将覆盖范围内的待卸料汽车903上的袋装物料卸完后,将待卸料汽车903移动一次,使未卸料部分置于本实用新型设备覆盖范围内,重复上述步骤5-8,即可将待装料汽车903上的袋装物料卸完。
[0054]
本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
[0055]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1