显示光发射装置的制作方法
1.本发明涉及一种在车辆的平视显示装置(head-up display device)上显示引导图像的显示光发射装置,尤其涉及一种发射在装配于头盔上的平视显示装置上显示引导图像的显示光的显示光发射装置。
背景技术:
2.近来,作为发射在车辆的平视显示装置上显示引导图像的显示光的显示光发射装置,已知车辆行驶时在不干扰驾驶员的正确判断的情况下从显示光发射装置向组合器(combiner)发射简易显示的显示光进行显示的装置。例如,在专利文献1中,作为平视显示装置的显示光发射装置的示例公开了:当本车到达与待进行左转或右转操作的引导地点相距第一规定距离(300m)的位置时,发射显示光以在平视显示装置中持续显示关于从目的地到本车的距离的显示图像(距离图像)、以及示出引导地点处的左右转信息的箭头的显示图像(方向图像)。另外,随后,当本车到达比第一规定距离的位置更靠近引导地点的与该引导地点相距第二规定距离(100m)的位置时,将关于距离的显示图像(距离图像)和关于驾驶操作的显示图像(方向图像)的显示从持续显示切换为闪烁显示。现有技术文献专利文献
3.专利文献1:日本特开h08-190696号公报
技术实现要素:
-发明所需解决的问题-4.然而,在车辆的平视显示装置中,由于可显示的信息有限,到引导地点的距离也大多是测定数百米单位的粗略值并显示该值。对此,在专利文献1中,显示箭头和距离以指引路线,在远离引导地点的位置处用数值表示距离图像,并且用常亮箭头表示示出行进方向的方向图像,在靠近引导地点的位置处距离图像的数值和方向图像的箭头均闪烁显示,因此在靠近引导地点的位置处表示距离的数值反而比较显眼,有可能被该数值误导而看错引导地点。
5.本发明是鉴于上述现有技术而完成的,其目的在于当处于靠近引导地点的位置时,在使驾驶员意识到靠近引导地点的情况的同时,避免引导显示干扰驾驶员的正确判断。-用于解决问题的方案-6.为了实现上述目的,本发明的特征在于,当到引导地点的距离在规定距离以内时,同时显示距离图像和方向图像,进而当接近引导地点时,继续显示到引导地点的方向图像并且消除距离图像的显示。
7.即,第一方面的发明是一种显示光发射装置,所述显示光发射装置发射在装配于头盔上的组合器上显示引导图像的显示光,其特征在于,所述显示光发射装置包括:
无线通信部,其从通信设备接收引导信息,所述引导信息包括:示出到规定的引导地点的距离的距离信息、以及示出该引导地点处的行进方向的方向信息;以及图像控制模块,其具有生成引导图像的图像生成部、以及发射将所述引导图像显示在所述组合器上的显示光的图像发射部,并控制所述图像生成部和所述图像发射部的工作,所述引导图像包括基于所述距离信息示出到所述引导地点的距离的距离图像、以及基于所述方向信息示出所述引导地点处的行进方向的方向图像;所述图像控制模块进行以下控制:当满足所述距离信息所示的距离小于规定的第一基准距离的条件时,由所述图像生成部生成所述距离图像和所述方向图像,从所述图像发射部发射将所述引导图像显示在所述组合器上的显示光,所述引导图像包括所生成的所述距离图像和所述方向图像,从满足所述距离信息所示的距离小于比所述第一基准距离更短的第二基准距离的条件时到到达所述引导地点,发射用于中止所述引导图像的所述距离图像的显示并且继续显示所述方向图像的显示光。
8.第二方面的发明是在第一方面的发明中,其特征在于,所述图像控制模块进行以下控制:在达到比所述第一基准距离更短的第三基准距离之前,将由所述图像生成部生成的所述方向图像作为第一进路方向图像,当满足所述距离信息所示的距离小于所述第三基准距离的条件时,将由所述图像生成部生成的所述方向图像作为由与所述第一进路方向图像不同的显示图像组成的第二进路方向图像,从所述图像发射部持续发射至所述组合器。
9.第三方面的发明是在第二方面的发明中,其特征在于,所述图像控制模块进行以下控制:当满足所述距离信息所示的距离小于比所述第三基准距离更短的第四基准距离的条件时,将由与所述第一进路方向图像和所述第二进路方向图像不同的显示图像组成的第三进路方向图像从所述图像发射部发射至所述组合器。
10.第四方面的发明是在第三方面的发明中,其特征在于,从所述引导地点到所述第二基准距离的距离小于从所述引导地点到所述第三基准距离的距离,并且大于从所述引导地点到所述第四基准距离的距离。
11.第五方面的发明是在第一至第四的任一方面的发明中,其特征在于,所述第一进路方向图像和第二进路方向图像包括箭头图像,所述第一进路方向图像的箭头图像与第二进路方向图像的箭头图像的显示状态各不相同。
12.第六方面的发明是在第三或第四方面的发明中,其特征在于,所述第一进路方向图像、所述第二进路方向图像和所述第三进路方向图像分别包括箭头图像,所述第一进路方向图像、所述第二进路方向图像和所述第三进路方向图像的所述箭头图像的显示状态各不相同。
13.第七方面的发明是在第一至第六的任一方面的发明中,其特征在于,从所述第二基准距离的位置到所述引导地点的距离间隔小于从所述第一基准距离的位置到所述第二基准距离的位置的距离间隔。
14.第八方面的发明是在第一至第七的任一方面的发明中,其特征在于,将从所述引
导地点到比所述第一基准距离的位置更远离所述引导地点的位置的距离设定为第五基准距离,所述第五基准距离以比所述第一基准距离更长的距离间隔设置在多个位置处,所述图像控制模块进行以下控制:当达到各所述第五基准距离时,在所设定的规定时间期间显示包括所述距离图像和所述方向图像的所述引导图像。
15.第九方面的发明是在第八方面的发明中,到达各所述第五基准距离时显示的所述引导图像的显示时间为30秒以下。-发明的效果-16.在第一方面的发明中,当到引导地点的距离达到第一基准距离时,显示距离图像和方向图像,当到引导地点的距离达到第二基准距离时,在到达引导地点之前中止距离图像的显示并且继续显示方向图像,因此不但可以使驾驶员强烈地意识到接近引导地点,而且能够防止距离图像干扰驾驶员的正确判断。
17.在第二方面的发明中,当离引导地点的距离小于第三基准距离时,在组合器上显示与第一进路方向图像不同的第二进路方向图像,因此不但会使驾驶员关注方向图像的变化,而且还可以使第二进路方向图像变得显眼以使驾驶员能够注意到,从而能够防止驾驶员看错引导地点处的行进方向。
18.在第三方面的发明中,当离引导地点的距离小于比第三基准距离短的第四基准距离时,在组合器上显示与第一进路方向图像和第二进路方向图像不同的第三进路方向图像,因此可以使驾驶员仅注视第三进路方向图像,从而能够可靠地防止看错引导地点处的行进方向。
19.在第四方面的发明中,第二基准距离为第三基准距离与第四基准距离之间的距离,因此在小于第三基准距离并从显示第一进路方向图像变为显示第二进路方向图像以使距离图像消失而仅关注方向图像之后,在距离图像消失的状态下行驶一段时间后从显示第二进路方向图像变为显示第三进路方向图像。因此,不但驾驶员能够意识到接近引导地点,而且通过使引导图像中的距离图像消失也非常容易判断行进方向。
20.在第五方面的发明中,行进时箭头图像的显示状态例如箭头的颜色发生变化、箭头的闪烁状态发生变化、箭头的粗细发生变化、或者它们发生组合变化,因此能够使驾驶员更容易看到箭头。
21.在第六方面的发明中,行进时箭头图像的显示状态发生两个阶段的变化,因此能够可靠地使驾驶员对箭头的变化产生深刻的印象。特别是,在方向图像和距离图像均显示的状态下距离图像从第一进路方向图像中消失之后,切换到第二进路方向图像,因此不但驾驶员容易意识到接近引导地点,而且还能够可靠地掌握行进方向。
22.在第七方面的发明中,与从行进时处于第一基准距离的位置到处于第二基准距离的位置的距离间隔相比,从处于第二基准距离的位置到引导地点的距离间隔更短,因此引导图像中的距离图像不显示的时间缩短。因此,驾驶员看漏引导地点或者看错引导地点的可能性很小,从而能够根据引导图像中显示的方向图像毫不犹豫地通过引导地点。
23.在第八方面的发明中,在比行进时处于第一基准距离的位置更靠前的位置设定的各第五基准距离处,例如分别在每个作为距离基准的转折点值处短时间显示引导图像,因此驾驶员能够在不妨碍行进的情况下正确地理解行进方向并且了解正在一点一点地接近
引导地点,从而安心地驾驶车辆。
24.在第九方面的发明中,在作为距离基准的各转折点值处仅短时间显示引导图像,因此驾驶员能够在获得必要信息的同时专注于驾驶。
附图说明
25.图1是表示具备本发明的实施方式1涉及的显示光发射装置的导航系统的结构的图。图2是表示具备本发明的实施方式1涉及的显示光发射装置的导航系统的结构的功能框图。图3是表示执行汽车导航应用程序(car navigation application)时由智能手机的微型计算机运行的处理的流程图。图4是表示引导操作中显示在智能手机的触摸面板上的图像的图。图5是表示由本发明的实施方式1涉及的显示光发射装置执行的正常状态的操作的流程图。图6是按时间序列表示由显示光发射装置的图像输出部输出的引导图像的各显示内容在到达引导地点期间在哪个时刻进行显示的图。图7是表示由本发明的实施方式1涉及的显示光发射装置的图像输出部输出的引导图像的一例的图。图8是表示由本发明的实施方式1涉及的显示光发射装置的图像输出部输出的引导图像的一例的图。图9是表示由本发明的实施方式1涉及的显示光发射装置的图像输出部输出的引导图像的一例的图。图10是表示由本发明的实施方式1涉及的显示光发射装置的图像输出部输出的引导图像的一例的图。图11是表示由本发明的实施方式2涉及的显示光发射装置的图像输出部输出的引导图像的图。图12是表示由本发明的实施方式3涉及的显示光发射装置的图像输出部输出的引导图像的图。
具体实施方式
26.(实施方式1)以下,根据附图对本发明的实施方式1进行说明。
27.图1是本发明应用于摩托车的例子,是表示导航系统的结构的图。图2是表示具备本发明的实施方式1涉及的显示光发射装置的导航系统的结构的功能框图。如图1所示,该导航系统1包括作为通信设备的智能手机10、以及摩托车的头盔20。应予说明,导航系统1还可以用于摩托车以外的交通工具,例如水上摩托(jet ski)、自行车、雪地摩托(snowmobile)等。智能手机10可以可拆卸地安装在摩托车上,也可以收容在可接收gps信号的包等中。
28.如图2所示,智能手机10包括:利用蓝牙(注册商标:bluetooth)进行无线通信的
lan接口11、gps接收器12、通过移动电话线路收发语音信号的wan接口13、作为信号处理装置的微型计算机14、以及作为输入部的触摸面板15。另外,微型计算机14包括:智能手机10的os移动操作系统14a、以及利用由gps接收器12获取的位置信息等在移动操作系统14a上运行的汽车导航服务应用程序(以下称为“汽车导航”)14b。智能手机10构成为:能够使用微型计算机14,基于由gps接收器12获得的位置信息(当前位置信息)和在触摸面板15上输入的目的地信息,自动搜索从当前地点到目的地的路线,进行路线设置。汽车导航应用程序14b构成为:基于地图信息和当前地点信息,计算从当前地点到下一个引导地点的距离和从当前地点到下一个引导地点的时间。在触摸面板15上显示到规定的引导地点的引导信息。具体的引导信息的显示例将在后述详细说明,例如可以显示示出到引导地点的距离的距离信息、表示引导地点处的行进方向的方向信息等。
29.如图1所示,在头盔20的前表面中央形成有沿水平方向延伸的呈近似长方形的窗孔21。在头盔20上设置有具有透光性的俯视呈近似u字形的护罩22。该护罩22的两端部分分别轴支撑在头盔20的各侧壁部上,通过在上下方向上转动以将窗孔21打开、关闭。在头盔20的外表面上从头盔佩戴者的角度观察时窗孔21的左侧、即头盔佩戴者的耳朵所对应的位置处,配设有包括第一开关23和第二开关24的多个开关。通过长按第一开关23,启动平视显示装置40的显示光发射装置30(后述)。通过短按第一开关23,强制停止显示光发射装置30。第二开关24是包括电话来电、电话通话等的多功能开关。
30.另外,在头盔20的窗孔21的上缘部上从头盔佩戴者的角度观察时左右方向中央的靠右位置处,经由安装部件27从头盔20的内侧安装有呈板状的半透明的组合器26。在头盔20的窗孔21的下方内置有本发明的实施方式所述的显示光发射装置30、以及将由该显示光发射装置30发射的显示光投射至组合器26的反射镜28。显示光发射装置30、组合器26和反射镜28构成平视显示装置40。
31.如图2所示,显示光发射装置30包括:蓝牙模块31(无线通信部),其能够利用蓝牙与智能手机10通信;以及图像控制模块32,其基于由蓝牙模块31接收的信息,生成显示在组合器26上的引导图像,并发射用于使所生成的引导图像显示在组合器26上的显示光。
32.蓝牙模块31从智能手机10的lan接口11接收例如到所设定的引导地点的路线信息、示出到所设定的引导地点的距离的距离信息、示出引导地点处的行进方向的方向信息、示出当前速度的速度信息、以及到达引导地点的所需时间等引导信息。
33.图像控制模块32包括:微型计算机32a,其从蓝牙模块31接收从lan接口11接收的引导信息,发出指令以由接收到的引导信息生成引导图像33;存储图像等的快闪只读存储器(flash rom(read only memory)32b;图形显示控制器(gdc,graphic display controller)32c(图像生成部);以及硅基液晶显示器(lcos,liquid crystal on silicon)32d(图像发射部),其发射将生成的图像显示在组合器26上的显示光。
34.图像控制模块32根据微型计算机32a的指令,将从蓝牙模块31接收的距离信息、方向信息等引导信息与存储在flash rom32b中的图像等组合,控制gdc32c生成引导图像33,控制lcos32d发射与生成的引导图像33相对应的显示光。例如,如图7所示,引导图像33在右上部以数值显示到引导地点的距离图像33a,在左上部以箭头显示示出引导地点处的行进方向的方向图像33b。另外,引导图像33在右下部以分和秒显示到引导地点的所需时间的时间图像33c,在左下方以时钟图像显示到达时间的推定时刻的时刻图像33d。应予说明,距离
图像33a构成为:在到引导地点的距离远的情况下以“km”为单位进行显示,当到引导地点的距离小于1km时以“m”为单位进行显示。
35.lcos32d发射使由gdc32c生成的引导图像33显示在组合器26上的显示光。由lcos32d输出的引导图像33可以通过短按第一开关23而强制停止。
36.在如上所述构成的导航系统1中,通过智能手机10的微型计算机14执行汽车导航应用程序14b,以进行图3的流程图所示的处理。
37.首先,在步骤s001中,在触摸面板15上显示提示目的地设定的画面。
38.接着,在步骤s002中,当用户在触摸面板15上完成设定目的地的输入操作时,所设定的目的地存储为引导对象的目的地。
39.然后,在步骤s003中,搜索从出发地到步骤s002中存储的引导对象的目的地的引导路线,将通过搜索获得的引导路线存储。
40.随后,在步骤s004中,根据步骤s003中存储的引导路线,执行引导操作。引导操作中的微型计算机14根据通过使用gps接收器12进行的搜索获得的引导路线,每1秒获取示出到下一个交叉路口等规定引导地点的距离的距离信息、以及示出引导地点处的行进方向的方向信息。然后,基于获取的距离信息和方向信息,将当前地点周围的地图、到引导地点的距离、以及引导地点处的行进方向等作为引导信息输出显示在触摸面板15上。图4表示在引导操作中显示在触摸面板15上的图像的示例。图4中,16a是智能手机的操作开关、16b是当前地点周围的地图、16c是到引导地点的距离、16d是引导地点处的行进方向。另外,在引导操作中,微型计算机14通过lan接口11的无线通信,发送(输出)通过执行汽车导航应用程序14b而获取的距离信息和方向信息作为引导信息。
41.在引导操作中,在步骤s005中,当用户在智能手机10上完成汽车导航应用程序14b结束的输入操作时,微型计算机14结束引导操作。
42.以下,根据图5至图10对如上所述构成的导航系统1的操作进行说明。在下文中,以摩托车在距离5km以上的位置启动导航系统1的情况为例进行说明。
43.首先,当摩托车等的驾驶员在携带汽车导航应用程序14b启动状态的智能手机10的状态下佩戴头盔20并长按第一开关23时,显示光发射装置30启动。汽车导航应用程序14b启动状态的智能手机10通过lan接口11的无线通信发送每秒更新的距离信息和方向信息作为到下一个交叉路口等引导地点的引导信息。显示光发射装置30启动后,在通过蓝牙模块31连接与智能手机10的无线通信期间,反复执行正常操作。
44.在正常操作中,判断行驶中的摩托车是否到达规定的转折点值(第五基准距离ky5),在到达该规定的转折点值的时刻,进行引导图像33的显示,通知驾驶员引导路线正确并且通知驾驶员正在逐渐接近引导地点。具体而言,当从当前地点到引导地点的距离d大于5km时,判断为距离引导地点非常远,处于省略正常操作的引导图像33的显示的状态,而在到达转折点值即5km的时刻,引导图像33仅显示短时间(例如10秒)。然后,在引导图像33显示10秒之后,中止引导图像33的显示。例如,如图7所示,引导图像33显示行进方向、到引导地点的距离、预计到达时间等。该短时间的引导图像33在到达其他转折点值(第五基准距离ky5)4km、3km、2km、1km的时刻也重复显示。通过该显示,能够使驾驶员分别意识到引导路径正确、以及到达规定距离的转折点值并且正在逐渐接近引导地点。例如,以平均速度36km/小时在市区行驶时,10秒前进100m,当到达5km等转折点值时,仅在其后行驶100m距离期间
显示引导图像33。另外,例如在高速公路上行驶时立交桥为引导地点的情况下,以平均速度72km/小时行驶时10秒前进200m,当到达5km等转折点值时,仅在其后行驶200m距离期间显示引导图像33。然后,例如,到引导地点的距离到达500m的转折点值即第一基准距离ky1的位置时,持续显示引导图像33,进行正常显示以使驾驶员意识到已接近引导地点,并且能够可靠地将驾驶员引导至引导地点。
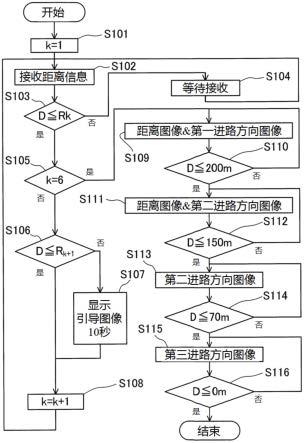
45.参照图5的流程图对该正常操作进行详细说明。
46.首先,通过长按第一开关23启动平视显示装置40的显示光发射装置30,进入步骤s101。在该步骤s101中,通过图像控制模块32的微型计算机32a,将计数值k初始化为1,进入步骤s102。应予说明,计数值只是为了方便而设定的。
47.接着,在步骤s102中,蓝牙模块31从汽车导航应用程序14b启动状态的智能手机10接收每秒更新并发送的距离信息,进入步骤s103。
48.在步骤s103中,通过图像控制模块32的微型计算机32a,判断是否满足距离条件:由蓝牙模块31接收的距离信息所示的距离d(到引导地点的距离)小于规定的基准距离rk。此处,计数值k在该显示光发射装置30启动时,从k=1开始,依次变为k=k+1,随着k=1、2、3、4、5、6,rk依次变为r1~r6。应予说明,本发明的实施方式1的r1~r6依次设定为r1=5km、r2=4km、r3=3km、r4=2km、r5=1km、r6=500m。
49.当在步骤s103中判断为“否”(no)时,即为不满足从当前地点到下一个引导地点的距离小于基准距离rk的距离条件的情况,进入步骤s104。即,初始时计数值k=1、rk=r1=5km,因此判断距离d是否为d≤5km(第五基准距离ky5)。当前的行驶位置(d》5km)与引导地点相距5km以上,不满足距离条件(d≤5km),因此进入步骤s104,等待下一次接收并且不执行正常操作的引导图像33的显示。
50.在步骤s104中,当前的行驶位置与引导地点相距5km以上,因此省略正常操作的引导图像33的显示,由智能手机10发送的距离信息和方向信息等待重新在蓝牙模块31中接收,返回步骤s102。即,行驶中的距离d为5km以上,因此从步骤s104进入步骤s102,反复进行步骤s103的判断,直到每秒更新的距离信息为5km以下。
51.另一方面,每秒更新的行驶位置变为d≤5km时,满足距离条件,因此在步骤103中判断为“是”(yes)并进入步骤s105。在步骤s105中,微型计算机32a判断计数值k是否为6。当计数值k不是6时,判断为no并进入步骤s106。另一方面,当计数值k为6时,判断为yes并进入步骤s109。也就是说,k=6即为d6=500m,判断距离d的位置是否在接近引导地点的距离即500m(第一基准距离ky1)以下,当距离d的位置为500m以下时判断为yes,进入步骤s109,视为接近引导地点的距离而显示引导图像33。另一方面,当距离d的位置与引导地点相距500m以上时,判断为no并进入步骤s106,进行表示未接近引导地点的另一个引导图像33的显示。
52.在步骤s106中,在微型计算机32a中判断是否满足距离d≤r
k+1
。当不满足距离d≤r
k+1
时,判断为no并进入步骤s107。另一方面,当满足距离d≤r
k+1
时,判断为yes并进入步骤s108。即,在上述情况下,计数值k=1因此r
k+1
=r2=4km,判断到引导地点的距离d是否满足d≤4km(第五基准距离ky5)的距离条件。此时的行驶位置为d<5km,每1秒更新距离,而微型计算机32a在数μ秒的短时间内进行判断,因此可以说当前的行驶位置处的距离d位于5km~4km之间。因此,不满足距离d≤r2(4km),所以判断为no并进入步骤s107。
53.在步骤s107中,lcos32d持续10秒发射将引导图像33显示在组合器26上的显示光。
如图6和图7所示,在引导图像33中显示距离图像33a的数值、行进方向的方向图像33b的箭头、时间图像33c(到达所需时间)、和时刻图像33d(预计到达时刻)。应予说明,图7所示的距离图像33a的5km的值、方向图像33b的右转箭头、时间图像33c的所需时间6分钟、时刻图像33d的预计到达时刻10点钟仅为示例,并非实际的数值或所需时间。另外,如图6所示,通过语音引导提示“约5km前方
○
方向”。在该行驶位置,到引导地点的距离d不是500m以下,无需持续显示引导图像33,因此引导图像33的显示仅停留短时间。在该引导图像33显示期间,图像控制模块32的gdc32c根据微型计算机32a的指令,与flash rom32b的信息组合生成引导图像33,lcos32d发射将由gdc32c生成的引导图像33显示在组合器26中的显示光。由蓝牙模块31接收的距离每秒更新,因此所生成的引导图像33的距离图像33a的数值也每秒更新。另外,除了引导图像33的距离图像33a的数值之外,时间图像33c的显示和时刻图像33d的时钟图像的显示也每1秒分别更新。然后,当从lcos32d开始发射显示光起经过10秒时,lcos32d停止发射显示光,进入步骤s108。
54.在步骤s108中,微型计算机32a将计数值k加1而使计数值为k=2,然后返回步骤s102。
55.然后,在步骤s102中接收新的距离d。随后,在步骤s103中判断步骤s102中获得的新的距离d是否为r2以下,即r2=4km(第五基准距离ky5)以下。在未达到4km以下的状态下,判断为no,不发射显示光,返回步骤s102。在此状态下,不发射任何显示光,因此也不显示引导图像33。当前的行驶位置的距离d在5km~4km之间,并且距离d每秒更新,因此在满足引导图像33的显示条件之前,行驶中不显示引导图像33。
56.然后,当每秒更新的距离d达到d≤4km时,在步骤s103中判断距离d为4km以下,因此经过步骤s105和步骤s106进入步骤s107,此时的距离所对应的引导图像33显示10秒,随后进入步骤s108,计数值为k=3,返回步骤s102。
57.由此,当rk变为r3、r4、r5时,反复进行如上所述的引导图像33的短时间显示。即,在r3=3km(第五基准距离ky5)、r4=2km(第五基准距离ky5)、r5=1km(第五基准距离ky5)的时刻,例如,图6所示的引导图像33显示10秒。每当通过r5=1km的位置处引导图像33显示10秒后进入步骤s108时,k=k+1、即k=6,rk=r6=500m,返回步骤s102。
58.然后,从步骤s102进入步骤s103,判断到引导地点的距离d是否为接近引导地点的距离即500m(第一基准距离ky1)以下。当距离d为500m以下时,判断为yes并且在步骤s103中满足d≤rk(rk=r6=500m),因此进入步骤s105。在步骤s105中,判断是否k=6。在该行驶状态下k=6,因此判断为yes并进入步骤s109。
59.在步骤s109中,距离显示为接近引导地点。即,进入步骤s109,在到达d=0km(引导地点)之前,持续发射用于在组合器26中显示引导图像33的显示光。此时,gdc32c根据微型计算机32a的指令生成引导图像33,lcos32d发射将由gdc32c生成的引导图像33显示在组合器26中的显示光。具体而言,如图6和图7所示,引导图像33在上部右侧以黑色数值显示到引导地点的距离图像33a,在上部左侧以蓝色箭头显示引导地点处的方向图像33b。应予说明,将该方向图像33b的显示图像设为第一进路方向图像33b1。另外,引导图像33在下部右侧以黑色数值显示到引导地点的所需时间即时间图像33c,在下部左侧以黑色显示预计到达时刻即时刻图像33d的时钟图像。应予说明,达到该第一基准距离ky1时的引导图像33与达到各第五基准距离ky5时显示10秒的引导图像33相同,不同之处在于持续显示。另外,由蓝牙
模块31接收的距离每秒更新,因此所生成的引导图像33也每秒更新。即,距离图像33a的数值的显示每秒更新。然后,进入步骤s110。
60.在步骤s110中,判断由蓝牙模块31接收的距离信息所示的距离d是否为200m(第三基准距离ky3)以下。在步骤s109中,当距离d不是200m以下时,判断为no并返回步骤s109。另一方面,当距离d达到200m以下时,判断为yes并进入步骤s111。
61.在步骤s111中,如图6和图8所示,引导图像33的蓝色箭头的显示图像即第一进路方向图像33b1变为黄色箭头的显示图像即第二进路方向图像33b2,提醒驾驶员注意行进方向,进入步骤s112。
62.在步骤s112中,判断由蓝牙模块31接收的距离信息所示的距离d是否为150m(第二基准距离ky2)以下。在步骤s112中距离d不是150m以下时,判断为no并返回步骤s111。另一方面,当距离d达到150m以下时,判断为yes并进入步骤s113。
63.在步骤s113中,如图6和图9所示,引导图像33的距离图像33a的数值显示消失不显示。由此,使驾驶员意识到到引导地点的距离d变得非常近,引导图像33显示距离的价值降低,并且使引导图像33的行进方向的显示变得显眼,然后进入步骤s114。应予说明,此时,引导图像33中的时间图像33c和时刻图像33d继续显示在引导图像33上,但是这些显示也可以消失。
64.在步骤s114中,判断由蓝牙模块31接收的距离信息所示的距离d是否为70m(第四基准距离ky4)以下。在步骤s114中距离d不是70m以下时,判断为no并返回步骤s113。另一方面,当距离d达到70m以下时,判断为yes并进入步骤s115。
65.在步骤s115中,如图6和图10所示,在引导图像33中的距离图像33a的数值显示消失的状态下,第二进路方向图像33b2的黄色箭头的显示图像变为由红色箭头的显示图像构成的第三进路方向图像33b3,进一步提醒驾驶员注意行进方向,进入步骤s116。应予说明,此时,引导图像33中的时间图像33c和时刻图像33d也继续显示在引导图像33中,但是它们的显示也可以消失。
66.在步骤s116中,判断由蓝牙模块31接收的距离信息所示的距离d是否为0m。在步骤s116中距离d不是0m时,判断为no并返回步骤s115。另一方面,当距离d达到0m时,判断为yes,从lcos32d发射的显示光全部消失,正常状态的引导图像33的显示结束。在该正常操作结束后,切换引导地点,继续执行下一个正常操作。
67.如上所述,在本实施方式1中,当到引导地点的距离d接近引导地点时,方向图像33b的行进方向的显示颜色依次变得更显眼,例如从蓝色变为黄色、从黄色变为红色,因此与距离信息相比驾驶员更加关注行进方向。然后,当到达接近引导地点的距离的位置时,中止距离图像33a的显示并继续显示方向图像33b,因此不但能够使驾驶员强烈地意识到已接近引导地点,而且还可以防止距离图像33a干扰驾驶员的正确判断。
68.特别地,在实施方式1中,200m(第三基准距离ky3)的箭头的显示图像颜色从蓝色变为黄色,在该颜色改变后150m(第二基准距离ky2)的地点处中止距离显示,因此使驾驶员更加强烈地关注行进方向。然后,在70m(第四基准距离ky4)地点处方向图像33b的箭头的显示图像从黄色变为红色,因此能够使驾驶员的注意力进一步集中在行进方向上,按照引导前进而不会看错引导地点处的行进方向。特别是,由于导航系统以数百米单位的数值表示距离数值本身,因此如果仅限于短距离的数值显示距离图像33a,则有可能在到引导地点的
距离与距离图像33a所显示的距离不一致的状态下行驶。因此,在本实施方式1中,当达到接近引导地点的距离(150m=第二基准距离ky2)时,通过特意消除距离的数值显示,可以使驾驶员在行驶时注意力集中在方向图像33b上而不被距离数值干扰。
69.应予说明,在上述正常操作的说明中,以在摩托车与引导地点相距5km以上的位置处启动导航系统1的情况为例进行了说明,但在摩托车与引导地点相距小于5km的位置处启动导航系统1的情况下,显示光发射装置30也按照图5所示的流程图工作。例如,以在摩托车与引导地点相距3.4km的位置处启动导航系统1的情况为例进行说明。应予说明,简要说明与上述说明相似的步骤。
70.当在摩托车位于与引导地点相距3.4km的位置处长按第一开关23时,平视显示装置40的显示光发射装置30启动,在步骤s101中,通过微型计算机32a将计数值k初始化为1。
71.接着,在步骤s102中,蓝牙模块31从汽车导航应用程序14b启动状态的智能手机10接收每秒更新发送的距离信息,进入步骤s103。
72.在步骤s103中,判断是否满足距离d≤r1(r1=5km)的距离条件。由于d=3.4km,因此满足显示条件,进入步骤s105。
73.在步骤s105中,判断计数值k是否为k=6。由于计数值k为k=1,因此进入步骤s106。
74.在步骤s106中,判断是否满足距离d≤r
k+1
(r
k+1
=r2=4km)。由于距离d=3.4km,满足d≤4km,因此进入步骤s108。
75.在步骤s108中,微型计算机32a通过将计数值k加1而使计数值为k=2,然后返回步骤s102。
76.然后,当在步骤s102中接收到新的距离d时,在步骤s103中判断距离d是否为r2以下、即rk=r2=4km以下。当前地点在d=3.4km的位置,因此满足判断条件,进入步骤s105。
77.在步骤s105中,判断计数值k是否为k=6。此时,计数值k为k=2而不是k=6,因此不满足判断条件,进入步骤s106。
78.在步骤s106中,判断是否满足d≤r
k+1
。由于r
k+1
=r3=3km,当前的距离d为d=3.4km,所以不满足d(3.4km)≤r3(3km)的判断条件。因此进入步骤s107。应予说明,到此为止的步骤的执行在数毫秒的时间内进行。
79.在步骤s107中,在图像控制模块32中生成当前地点为d=3.4km的位置处的引导图像33,该引导图像33的显示光由lcos32d发射并在组合器26中显示10秒。然后,当显示光的发射开始后经过10秒时,lcos32d结束发射显示光,进入步骤s108。
80.在步骤s108中,计数值k设为k=3,返回步骤s102。由此,当rk依次变为r3、r4、r5并且当前地点变为3km、2km、1km时,引导图像33分别显示10秒。然后,当rk变为r6并且当前地点处于与引导地点相距500m的位置时,执行引导图像33的持续显示。
81.如上所述,当前地点位于与引导地点相距3.4km的地点时,按照图5所示的流程图执行至计数值k从k=1变为k=2,确定当前地点,在该地点执行显示10秒引导图像33,然后依次在3km、2km、1km的地点重复显示10秒引导图像33。随后,当rk变为r6并且当前地点到达与引导地点相距500m的位置时,执行引导图像33的持续显示。
82.另外,当在摩托车在与引导地点相距0.4km的位置长按第一开关23时,平视显示装置40的显示光发射装置30启动,在步骤s101中将计数值k初始化为1之后,依次从k=1到k=
6反复进行上述步骤,在步骤s105中进行判断之后,当k=6时进入步骤s109,执行如上所述接近引导地点时的显示操作。即,执行在接近引导地点的位置处的引导图像33的显示,而不执行引导图像33的10秒的显示。
83.如上所述,在图5所示的流程图中,在启动导航系统1进行正常操作的情况下,例如在与引导地点相距5km以上的位置处启动导航系统1的情况下,在与引导地点分别相距5km、4km、3km、2km、1km的位置进行10秒引导图像33的显示,当到达与引导地点相距500m以下的位置时持续进行引导图像33的显示。另外,在比与引导地点相距5km的位置更接近引导地点的位置启动导航系统1的情况下,即时判断当前地点是否在rk与r
k+1
之间,或者是否处于计数值k=6的状态,因此能够瞬间掌握当前地点,从而能够执行必要的步骤。即,在启动导航系统1时,无论在哪个位置均执行计数值k从1起依次加1的流程,由此可以瞬间确定驾驶员的当前地点,执行必要的步骤。
84.特别是,当到达离引导地点近的距离500m(第一基准距离ky1)以下时,持续显示引导图像33进行引导,当到达离引导地点极近的位置(第二基准距离ky2)、例如与引导地点相距150m的位置时,中止引导图像33的距离图像33a的显示并仅由方向图像33b进行引导,因此驾驶员能够根据方向信息在正确的路线上行驶而不受离引导地点极近的位置处的距离信息的影响。
85.在常规的导航系统中,以数百米左右的概算值测定并显示车辆的引导地点,因此当到达与引导地点相距数百米以内的极近位置时,距离的数值有可能不准确。与之相对,在本发明中,当如上所述到达离引导地点极近的位置时,作为距离信息的距离图像33a消失,因此驾驶员在被引导图像33引导至引导地点时不会被距离图像33a所干扰。此时,通过改变并突出显示方向图像33b的显示状态,使驾驶员的注意力进一步集中在方向图像33b上,因此能够使驾驶员对方向图像33b的注意力增加以根据方向信息准确地行驶至引导地点。
86.应予说明,作为到离引导地点极近的位置的距离,第二基准距离优选为100m~200m左右。
87.(实施方式2)参照图11对实施方式2进行说明。实施方式2与实施方式1的不同点在于,在驾驶员到达第四基准距离(70m)的时刻所显示的引导图像33的距离信息改变,其他与实施方式1相同。
88.即,如图11所示,与实施方式1的方向图像33b同样显示引导图像33的方向图像33b,并且通过文字“下一个红绿灯右转,
○
方向”表示的方向图像33b以便于理解的方式显示引导地点处的行进方向。此时,时间图像也与距离信息一起消失。
89.在该实施方式2中,在引导图像33上详细且便于理解地显示引导地点处的交叉路口的信息,因此驾驶员可以减少引导地点处的进路方向的错误。
90.(实施方式3)参照图12对实施方式3进行说明。实施方式3与实施方式1的不同点在于,驾驶员到达第四基准距离(70m)的时刻所显示的引导图像33改变,其他与实施方式1相同。
91.即,在实施方式3中,例如,如图12所示,在引导图像33上也直接以文字图像33f显示,以便于理解语音说明
“○
方向”的语言。进而,在引导图像33的下部,并排显示当前所引导的引导地点的下一个引导地点处的方向图像33g的箭头、以及距离图像33h的数值。通过
将下一个引导地点处的信息添加到引导图像33上,可以明确下一个引导地点的信息,从而使驾驶员能够安心驾驶。特别是,可以容易地理解下一个引导地点处于哪个程度的距离或者位于哪个方向,从而使驾驶员能够准确无误地在行进方向上行驶。由此,当下一个引导地点位于离当前所引导的引导地点较近的位置,并且马上就需要下一个引导地点的信息时,例如在错综复杂的市区行驶途中,作为当前所引导的引导地点的下一个待引导的引导地点的交叉路口位于与当前所引导的引导地点相距50m或100m等近距离处时,驾驶员可以准确无误地在行进方向上行驶。
92.(其他实施方式)另外,在上述实施方式1~3中,lcos32d可以发射显示光以在开始显示正常操作的引导图像33时使引导图像33淡入,并且在结束显示正常操作的引导图像时使引导图像淡出。由此,在开始显示引导图像33时,组合器26上显示的引导图像33逐渐变亮,而结束显示引导图像33时,组合器26上显示的引导图像33逐渐变暗,因此能够减轻佩戴头盔20的驾驶员的眼睛的负担。
93.另外,在上述实施方式1~3中,作为改变方向图像33b的显示图像的示例,将箭头颜色从蓝色变为黄色、从黄色变为红色,但颜色不限于此,也可以是其他颜色。另外,方向图像33b的变更显示只要以不妨碍行驶的程度显眼地显示即可,例如可以改变箭头的闪烁状态、箭头的粗细或大小、或者它们的组合进行显示。
94.另外,在上述实施方式1~3中,分别将第一基准距离设定为500m、第三基准距离设定为200m、第二基准距离设定为150m、第四基准距离设定为70m,但是这些数值仅为一例,也可以是其他数值。
95.另外,上述数值可以根据车辆的速度改变。上述数值也可以根据交通堵塞状况、行驶车道的数量、道路的宽度等而改变。另外,上述数值还可以根据交叉路口、高速公路、立交桥等而改变。
96.在方向图像33b的箭头颜色变化的位置、即第三基准距离200m的位置和第四基准值距离70m的位置与距离图像33a的显示消失的位置、即第二基准距离150m的位置不同的情况下,驾驶员更容易看清,但是位置也可以相同。
97.第一基准距离、第二基准距离、第三基准距离、第四基准距离、第五基准距离的数值是自动设定的,但也可以手动更改。
98.第一基准距离、第二基准距离、第三基准距离、第四基准距离、第五基准距离的数值,即500m、1km、2km、3km、4km、5km仅为一例,并不限于这些数值,也可以是3km、2km、1km、500m,还可以是3km、2.5km、2km、1.5km、1km、500m、300m。
99.特别是,在比与引导地点相距第一基准距离(500m)的位置更远离引导地点的位置处,每隔比第一基准距离更长的间隔(1km)的一定距离执行显示,而如果第一基准距离小于1km,则也可以是不同的数值。
100.到达驾驶员与引导地点相距500m的位置时的引导图像33与到达5km、4km、3km、2km、1km时的引导图像33为同一种类,但也可以在各位置显示不同的引导图像33。
101.在实施方式1~3中,例示了10秒作为在第五基准距离的位置处显示引导图像33的短时间的例子,但该数值仅为一例,并不限于该数值。也就是说,只要驾驶员在行驶中能够意识到已到达一段距离即可,只要能够意识到最好马上就消失以扩大视野,因此也可以小
于10秒。反之,如果显示时间过长则会干扰驾驶员的正确判断,因此优选显示时间最长不超过30秒。
102.当在与引导地点相距5km以上的位置启动导航系统1时,引导图像33不进行正常操作,但是也可以显示其他引导图像或者播放语音信息。例如,可以播放“离引导地点5km以上。请继续沿行驶道路前进”等语音。-产业上的可利用性-103.本发明能够用作发射在装配于头盔上的组合器上显示引导图像的显示光的显示光发射装置。-符号说明-104.1:导航系统10:通信设备智能手机20:头盔26:组合器30:显示光发射装置31:蓝牙模块(无线通信部)32:图像控制模块32s:微型计算机32b:flash rom32c:gdc(图像生成部)32d:lcos(图像发射部)33:引导图像33a:距离图像33b:方向图像33b1:第一进路方向图像3362:第二进路方向图像3363:第三进路方向图像33c:时间图像33d:时刻图像40:平视显示装置ky1:第一基准距离ky2:第二基准距离ky3:第三基准距离ky4:第四基准距离ky5:第五基准距离
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1