基于CMAC的智能驾驶员模型构建方法
基于cmac的智能驾驶员模型构建方法
技术领域
1.本发明涉及汽车自动控制技术领域,尤其涉及一种基于cmac的智能驾驶员模型构建方法。
背景技术:
2.汽车驾驶员模型是一个复杂的控制系统,是对驾驶员操纵汽车的行为的数学表达形式。驾驶员模型包含感知、决策、执行模块,感知模块可以获取道路信息和车辆状态信息,决策模块通过一定的数学模型并根据感知模块传来的信息求解出最优输出,执行模块来模拟人类驾驶员的神经和肌肉延迟行为。驾驶员模型分为补偿跟踪驾驶员模型、预瞄驾驶员模型和智能驾驶员模型。补偿跟踪驾驶员模型是根据自车横向位置与车道线的距离来决策输出转角,并没有考虑到真实驾驶员的预瞄环节;预瞄驾驶员模型可以感知未来时刻自车横向位置和车道线的距离,提前做出修正转角,一般有单点预瞄模型、两点预瞄模型和多点预瞄模型,可以根据不同的工况进行选择;智能驾驶员模型考虑到多层感知能力,并能很好的模拟人类大脑的思维方式,更贴合真实驾驶员,具有代表性的是神经网络驾驶员模型和模糊控制驾驶员模型,神经网络驾驶员模型可以最大限度的模拟人类驾驶员的大脑运作方式,模糊控制驾驶员模型可以模拟人类驾驶员的思维能力。随着监控技术、通讯技术、计算机技术、人工智能以及控制理论的不断发展,有关驾驶员模型的研究成果越来越多,已经成为自动驾驶领域的热点研究问题。
3.cn 105136469 a对驾驶员模型输入变量模糊化,采用模糊值建立输入输出变量隶属度函数,搭建基于改进后的pso算法和模糊rbf神经网络算法的车速控制器;cn 106202698 b将车辆移动过程中的相对速度、相对位置、时间依赖度、空间依赖度及路面依赖度作为不确定性指标,并根据这些指标对驾驶员模型的相关参数进行修正,表征节点移动策略和移动规律;cn 104260725 b的驾驶员模型根据驾驶员的驾驶特征和道路环境信息调节车辆的性能;cn 107651010b将经验驾驶员操纵模型、bang-bang控制和基于强化学习优化的模糊pi控制相结合对液压伺服驱动转向系统进行控制,满足无人车自主转向的需要;cn 112874509 b的智能驾驶员模型基于idm确定当前车辆的周围车辆在每个候选轨迹影响下的预测轨迹,筛选不满足预设约束条件的候选轨迹,量化选择出最优轨迹。上述建立的驾驶员模型有的较复杂,不能满足控制系统的实时性,有的抗干扰能力较差,不能保证系统控制的稳定性。
技术实现要素:
4.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种基于cmac的智能驾驶员模型构建方法。
5.本发明为解决上述技术问题采用以下技术方案:
6.基于cmac的智能驾驶员模型构建方法,包含以下步骤:
7.步骤1),在汽车上设置横向加速度传感器、横摆角速度传感器、倾角传感器,其中,
所述横向加速度传感器用于获得汽车的侧向速度,所述横摆角速度传感器用于获得汽车的横摆角速度,所述倾角传感器用于获得汽车的侧倾角和侧倾角速度;
8.步骤2),根据汽车三自由度模型的运动方程即横向、横摆、侧倾方向的运动方程推导出汽车当前的ltr值,并根据汽车三自由度模型的运动方程求解汽车的稳态ltr值,所述ltr为汽车左右垂向力的差值和左右垂向力之和的比;
9.ltr用来表征汽车的侧倾状态。
10.汽车三自由度模型为:
11.横向运动方程:
12.横摆运动方程:
13.侧倾运动方程:
[0014][0015]
式中,m为汽车总质量,ms为簧载质量,δ为前轮转角,u为车速,g为重力加速度,a、b分别为质心到前后轴的距离,h为侧倾中心到质心的距离,b为轮距,ay为汽车的侧向加速度,kf、kr分别为前轮侧偏刚度、后轮侧偏刚度,i
x
为汽车绕侧倾中心的转动惯量,iz为汽车绕z轴的转动惯量,为悬架的等效侧倾阻尼,为悬架的等效侧倾刚度,v为侧向速度,为侧向加速度,r为横摆角速度,为横摆角加速度,为悬架的侧倾角度,为悬架的侧倾角速度,为悬架的侧倾角加速度;
[0016]
令为0,求解稳态ltr值,以稳态ltr值作为系统控制的目标值,既能避免侧翻风险也能不改变驾驶员的行驶意图;
[0017]
步骤3),采用cmac神经网络(小脑模型神经网络)与单神经元自适应pid控制器相结合的方式进行决策;
[0018]
前馈、反馈神经网络具有全局性,即每进行一次学习,所有的权值都会进行更新,而cmac神经网络具有局部性,即每次学习后只对被激活的权值进行更新,具有很好的实时性;单神经元自适应pid控制器是根据增量式pid设计出的可以实时改变比例、积分、微分系数的单神经元网络,可以提高控制器的稳定性和抗干扰能力;
[0019]
步骤3.1),初始时刻cmac神经网络的所有权值皆为0,cmac神经网络的初始输出转角δ2=0,单神经元自适应pid控制器的初始权值预先设置;
[0020]
步骤3.2),将当前ltr与稳态ltr的差值作为误差输入,并将相邻三个时刻的误差转换成增量式pid的三个状态量,即:
[0021]
e(k)=δltr(k)
[0022]
x1(k)=e(k)
[0023]
x2(k)=e(k)-e(k-1)
[0024]
x3(k)=e(k)-2e(k-1)+e(k-2)
[0025]
式中,δltr(k)为k时刻的误差,x1、x2、x3分别为增量式pid的三个状态量;
[0026]
步骤3.3),求解当前单神经元自适应pid控制器的输出转角δ1:
[0027][0028]
式中,k为比例系数,为对应于xi(k)的加权系数;
[0029]
步骤3.4),采用有监督hebb算法根据误差、增量式pid的三个状态量、δ1对增量式pid的三个状态量的系数更新:
[0030]
wi(k+1)=wi(k)+ηie(k)δ1(k)xi(k)
[0031]
式中,wi(k)为对应于xi(k)的系数,ηi为学习速率;
[0032]
步骤3.5),对当前ltr和误差e(k)进行标准化处理,量化到0-γ区间内:
[0033][0034][0035]
式中,α1、α2分别为当前ltr、误差e(k)的量化值,ltr
min
、ltr
max
分别为当前ltr变化范围的最小值、最大值,δltr
min
、δltr
max
分别为误差e(k)变化范围的最小值、最大值,γ为预设的量化系数;
[0036]
步骤3.6),根据量化后的当前ltr、误差e(k)进行地址映射,激活权值;
[0037]
这里的地址映射相当于查表的方式,即每个地址对应一个权值,根据α1、α2查找对应的地址,将二维输入都分为m层,每层分为nb块,这样每输入两个量经过量化处理后就能确定出每层的唯一地址,对应地址的权值就会被激活,根据地址公式查找地址,激活权值,即:
[0038]bx
=int((α1+p)/m);
[0039]by
=int((α2+p)/m);
[0040]
s(q)=b
x
+by×
nb+(q-1)
×
nb2+1.
[0041]
式中,b
x
、by分别为地址系数,m为层数,nb为块数,q=1~4,p=m-q,s(q)为权值地址;
[0042]
步骤3.7),将权值求和作为cmac神经网络的输出转角δ2,即:
[0043][0044]
式中,ωj为激活的权值,aj为cmac存储器地址选择向量;
[0045]
步骤3.8),将单神经元自适应pid控制器的输出转角δ1与cmac神经网络的输出转角δ2的和作为前轮转角δ,根据δ与δ2的差,采用梯度下降法对激活地址的权值进行更新,权值更新公式为:
[0046][0047]
式中,β为预设的cmac神经网络学习速率;
[0048]
步骤4),考虑到驾驶人在大脑发出指令时并不能立即执行操作,会有一定的神经延迟和肌肉延迟,采用两个传递函数g1(s)和g2(s)分别模拟人类驾驶员的神经与肌肉延迟,
将输出转角δ作为g1(s)的输入,将g1(s)的输出作为g2(s)的输入,将g2(s)的输出作为汽车方向盘目标转角;
[0049]
两个传递函数分别为:
[0050][0051][0052]
其中,td为驾驶员神经系统延迟时间,tn为驾驶员肌肉系统延迟时间。
[0053]
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
[0054]
(1)本发明提出汽车防侧翻的cmac智能驾驶员模型构建方法,设计了更接近真实驾驶员防止汽车侧翻的思维运行方式;
[0055]
(2)本发明引入单神经元自适应pid控制器,不仅能使其控制参数随系统的时变而变化,而且能改善cmac神经网络的过学习现象;
[0056]
(3)本发明将cmac神经网络与自适应神经元控制器构成复合控制器,不仅能用自适应神经元控制器评判cmac控制器的性能,也能提高控制系统的稳定性和抗干扰能力,具有实时性好、输出误差小、鲁棒性强的特点。
附图说明
[0057]
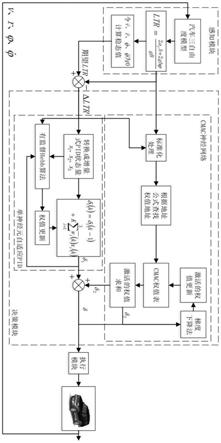
图1是本发明的整体控制结构图。
[0058]
图2是本发明的地址公式与权值表的对应关系图。
具体实施方式
[0059]
下面结合附图对本发明的技术方案做进一步的详细说明:
[0060]
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
[0061]
如图1所示,本发明公开了基于cmac的智能驾驶员模型构建方法,包含以下步骤:
[0062]
步骤1),在汽车上设置横向加速度传感器、横摆角速度传感器、倾角传感器,其中,所述横向加速度传感器用于获得汽车的侧向速度,所述横摆角速度传感器用于获得汽车的横摆角速度,所述倾角传感器用于获得汽车的侧倾角和侧倾角速度;
[0063]
步骤2),根据汽车三自由度模型的运动方程即横向、横摆、侧倾方向的运动方程推导出汽车当前的ltr值,并根据汽车三自由度模型的运动方程求解汽车的稳态ltr值,所述ltr为汽车左右垂向力的差值和左右垂向力之和的比;
[0064]
ltr用来表征汽车的侧倾状态。
[0065]
汽车三自由度模型为:
[0066]
横向运动方程:
[0067]
横摆运动方程:
[0068]
侧倾运动方程:
[0069][0070]
式中,m为汽车总质量,ms为簧载质量,δ为前轮转角,u为车速,g为重力加速度,a、b分别为质心到前后轴的距离,h为侧倾中心到质心的距离,b为轮距,ay为汽车的侧向加速度,kf、kr分别为前轮侧偏刚度、后轮侧偏刚度,i
x
为汽车绕侧倾中心的转动惯量,iz为汽车绕z轴的转动惯量,为悬架的等效侧倾阻尼,为悬架的等效侧倾刚度,v为侧向速度,为侧向加速度,r为横摆角速度,为横摆角加速度,为悬架的侧倾角度,为悬架的侧倾角速度,为悬架的侧倾角加速度;
[0071]
令为0,求解稳态ltr值,以稳态ltr值作为系统控制的目标值,既能避免侧翻风险也能不改变驾驶员的行驶意图;
[0072]
步骤3),采用cmac神经网络(小脑模型)与单神经元自适应pid控制器相结合的方式进行决策;
[0073]
前馈、反馈神经网络具有全局性,即每进行一次学习,所有的权值都会进行更新,而cmac神经网络具有局部性,即每次学习后只对被激活的权值进行更新,具有很好的实时性;单神经元自适应pid控制器是根据增量式pid设计出的可以实时改变比例、积分、微分系数的单神经元网络,可以提高控制器的稳定性和抗干扰能力;
[0074]
步骤3.1),初始时刻cmac神经网络的所有权值皆为0,cmac神经网络的初始输出转角δ2=0,单神经元自适应pid控制器的初始权值预先设置;
[0075]
步骤3.2),将当前ltr与稳态ltr的差值作为误差输入,并将相邻三个时刻的误差转换成增量式pid的三个状态量,即:
[0076]
e(k)=δltr(k)
[0077]
x1(k)=e(k)
[0078]
x2(k)=e(k)-e(k-1)
[0079]
x3(k)=e(k)-2e(k-1)+e(k-2)
[0080]
式中,δltr(k)为k时刻的误差,x1、x2、x3分别为增量式pid的三个状态量;
[0081]
步骤3.3),求解当前单神经元自适应pid控制器的输出转角δ1:
[0082][0083]
式中,k为比例系数,为对应于xi(k)的加权系数;
[0084]
步骤3.4),采用有监督hebb算法根据误差、增量式pid的三个状态量、δ1对增量式pid的三个状态量的系数更新:
[0085]
wi(k+1)=wi(k)+ηie(k)δ1(k)xi(k)
[0086]
式中,wi(k)为对应于xi(k)的系数,ηi为学习速率;
[0087]
步骤3.5),对当前ltr和误差e(k)进行标准化处理,量化到0-γ区间内:
[0088][0089][0090]
式中,α1、α2分别为当前ltr、误差e(k)的量化值,ltr
min
、ltr
max
分别为当前ltr变化范围的最小值、最大值,δltr
min
、δltr
max
分别为误差e(k)变化范围的最小值、最大值,γ为预设的量化系数;
[0091]
步骤3.6),根据量化后的当前ltr、误差e(k)进行地址映射,激活权值;
[0092]
这里的地址映射相当于查表的方式,即每个地址对应一个权值,根据α1、α2查找对应的地址,将二维输入都分为m层,每层分为nb块,这样每输入两个量经过量化处理后就能确定出每层的唯一地址,对应地址的权值就会被激活,根据地址公式查找地址,激活权值,即:
[0093]bx
=int((α1+p)/m);
[0094]by
=int((α2+p)/m);
[0095]
s(q)=b
x
+by×
nb+(q-1)
×
nb2+1.
[0096]
式中,b
x
、by分别为地址系数,m为层数,nb为块数,q=1~4,p=m-q,s(q)为权值地址;
[0097]
如图2所示,ltr和误差ltr量化后的结果分别为3.5和3,第一层有4个地址为aa,ab,ba,bb,这4个地址分别对应图1权值表中的ω1,ω2,ω3,ω4,其他层级对应关系与第一层类似。根据地址公式我们可以求出第一层结果4,即地址为bb,提取权值ω4,以此类推,可以求出其他层级的激活权值为ω8,ω
12
,ω
13
,即cmac神经网络的输出转角δ2=ω4+ω8+ω
12
+ω
13
;
[0098]
步骤3.7),将权值求和作为cmac神经网络的输出转角δ2,即:
[0099][0100]
式中,ωj为激活的权值,aj为cmac存储器地址选择向量;
[0101]
步骤3.8),将单神经元自适应pid控制器的输出转角δ1与cmac神经网络的输出转角δ2的和作为前轮转角δ,根据δ与δ2的差,采用梯度下降法对激活地址的权值进行更新,权值更新公式为:
[0102][0103]
式中,β为预设的cmac神经网络学习速率;
[0104]
步骤4),考虑到驾驶人在大脑发出指令时并不能立即执行操作,会有一定的神经延迟和肌肉延迟,采用两个传递函数g1(s)和g2(s)分别模拟人类驾驶员的神经与肌肉延迟,将输出转角δ作为g1(s)的输入,将g1(s)的输出作为g2(s)的输入,将g2(s)的输出作为汽车
方向盘目标转角;
[0105]
两个传递函数分别为:
[0106][0107][0108]
其中,td为驾驶员神经系统延迟时间,tn为驾驶员肌肉系统延迟时间。
[0109]
本发明将cmac神经网络与自适应神经元控制器构成复合控制器,不仅能用自适应神经元控制器评判cmac控制器的性能,也能提高控制系统的稳定性和抗干扰能力,具有实时性好、输出误差小、鲁棒性强的特点。
[0110]
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
[0111]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1