陆空两用多功能无人机
1.本发明涉及无人机技术领域,具体涉及一种陆空两用多功能无人机。
背景技术:
2.无人驾驶飞机简称为无人机,是利用无线电遥控设备和自身的程序控制装置操纵的不载人飞机。但是只具备飞行功能的无人机在一些场合无法发挥出作用,对人们的生活没有任何帮助。所以陆空两用无人机的出现很好地解决了当前无人机面对的尴尬处境。
3.无人机在飞行过程中可以从高空俯瞰地面,看到人们站在地面上无法看到的场景,从而给人们带来一个全新的视野。但当面临一些人们不便去到的地方时,只具备飞行功能的无人机没有办法很好地完成任务。所以具备陆空两用功能的无人机可以在特定的场合停在地面上,自动收起机翼后,便可以在地面自由行驶,继续完成任务作业。
4.因此,为解决以上问题,需要一种陆空两用多功能无人机,能够在空中飞行,同时也能在陆地上行走,满足无人机的陆空两用,同时为无人机设计储物仓,使无人机具备一定的运载能力,为人们的生活带来极大的便利。
技术实现要素:
5.有鉴于此,本发明的目的是克服现有技术中的缺陷,提供陆空两用多功能无人机,能够在空中飞行,同时也能在陆地上行走,满足无人机的陆空两用,同时为无人机设计储物仓,使无人机具备一定的运载能力,为人们的生活带来极大的便利。
6.本发明的陆空两用多功能无人机,包括机身本体、旋翼结构及行走轮,所述机身本体上设置储物仓,所述旋翼结构与机身本体转动连接用于为机身本体提供升力,所述行走轮与机身本体转动连接用于为机身本体提供触地支撑力和行走驱动力。
7.进一步,所述旋翼结构为四个,呈中心对称的方式周向设置于机身本体外侧,所述旋翼结构包括折叠旋翼及伸缩翼臂,所述伸缩翼臂的首端与固定于机身本体上的舵机转动连接,所述折叠旋翼设置于所述伸缩翼臂的末端上方。
8.进一步,所述伸缩翼臂包括固定段和悬伸段以及伸缩组件,所述伸缩组件设置于所述固定段和悬伸段之间用于调节悬伸段与固定段之间的距离,所述固定段靠近所述舵机,所述悬伸段末端与所述折叠旋翼连接。
9.进一步,所述伸缩组件包括丝杆、丝杆座及限位滑块,所述悬伸段内部中空且所述限位滑块单自由度可滑动地设置于所述悬伸段内部,所述丝杆与悬伸段螺纹连接且末端与位于悬伸段内部的限位滑块单自由度可转动的连接,所述丝杆的首端与丝杆座单自由度可转动连接,所述丝杆座与所述固定段固定连接,所述丝杆旋转时可以将丝杆的旋转运动转化为悬伸段的直线运动,通过控制丝杆的旋转两即可完成悬伸段的伸出量,即实现对翼臂的伸长量的调节。
10.进一步,还包括用于驱动丝杆旋转的马达,所述固定段内部中空,所述马达置于所述固定段内部,马达设置于所述固定段中部,固定段与丝杆座形成马达的保护壳,保护马
达,防尘防水,延长马达的使用寿命。
11.进一步,所述伸缩翼臂与所述折叠旋翼之间还设置有用于驱动折叠旋翼旋转的电机。
12.进一步,所述伸缩翼臂通过旋块与所述舵机转动连接,在收纳翼臂时,舵机驱动旋块旋转90
°
即可使翼臂与无人机机身靠紧,进而确保更加节约收纳空间。
13.进一步,所述行走轮为4个,所述行走轮为球形轮或者滚动轮,球形轮可以让无人机在底面行驶时不受限制转向灵活,滚动轮的通过性更好。
14.进一步,所述机身本体上还设置有用于放置电池及控制器的设备仓,所述设备仓位于所述储物仓的上方,所述设备仓与所述储物仓固定连接,储物仓的设计可以让无人机的作用不止勘测,还能将一些特殊场合急需的物资带到所需的地方,是无人机具备一定的运输能力,设备仓内的控制器作为无人机运行时的大脑,与所有的电机、马达、舵机及摄像头都电信号连接,接收指令和发送指令。
15.进一步,所述机身本体上还设置有用于拍摄的摄像头。
16.本发明的有益效果是:本发明公开的一种陆空两用多功能无人机,通过设置可以折叠的旋翼结构和便于行走的行走轮,使得本无人机具备陆空两用的优点,同时还设置储物仓以满足一定程度的运输能力,既可以空中飞行,全面收集地面信息;也可以在地面行驶,转向便利,所占空间较小,适用于多种场合。
附图说明
17.下面结合附图和实施例对本发明作进一步描述:
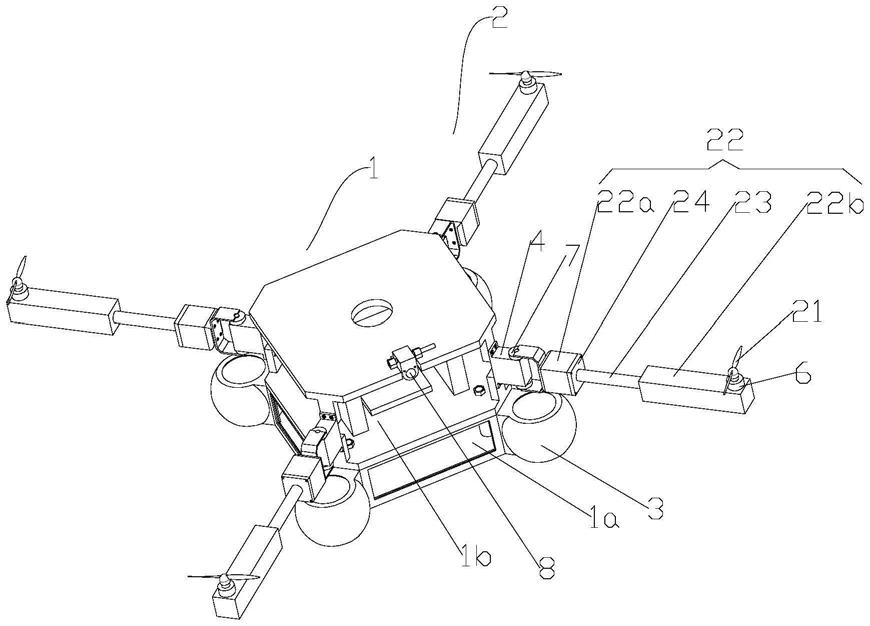
18.图1为本发明行走轮为球形轮的结构示意图;
19.图2为本发明行走轮为滚动轮的机身本体结构示意图;
20.图3为本发明的旋翼结构的结构示意图;
21.图4为图3的剖视结构示意图;
22.图5为图3的折叠旋翼处于折叠状态时的俯视结构示意图。
具体实施方式
23.图1为本发明行走轮为球形轮的结构示意图,图2为本发明行走轮为滚动轮的机身本体结构示意图,图3为本发明的旋翼结构的结构示意图,图4为图3的剖视结构示意图,图5为图3的折叠旋翼处于折叠状态时的俯视结构示意图,如图所示,本实施例中的陆空两用多功能无人机包括机身本体1、旋翼结构2及行走轮3,所述机身本体1上设置储物仓1a,所述旋翼结构2与机身本体1转动连接用于为机身本体1提供升力,所述行走轮3与机身本体1转动连接用于为机身本体1提供触地支撑力和行走驱动力。
24.本实施例中,所述旋翼结构2为四个,呈中心对称的方式周向设置于机身本体1外侧,所述旋翼结构2包括折叠旋翼21及伸缩翼臂22,所述伸缩翼臂22的首端与固定于机身本体1上的舵机4转动连接,所述折叠旋翼21设置于所述伸缩翼臂22的末端上方。
25.本实施例中,所述伸缩翼臂22包括固定段22a和悬伸段22b以及伸缩组件,所述伸缩组件设置于所述固定段22a和悬伸段22b之间用于调节悬伸段22b与固定段22a之间的距离,所述固定段22a靠近所述舵机4,所述悬伸段22b末端与所述折叠旋翼21连接。
26.本实施例中,所述伸缩组件包括丝杆23、丝杆座24及限位滑块25,所述悬伸段22b内部中空且所述限位滑块25单自由度可滑动地设置于所述悬伸段22b内部,所述丝杆23与悬伸段22b螺纹连接且末端与位于悬伸段22b内部的限位滑块25单自由度可转动的连接,所述丝杆23的首端与丝杆座24单自由度可转动连接,所述丝杆座24与所述固定段22a固定连接,所述丝杆23旋转时可以将丝杆23的旋转运动转化为悬伸段22b的直线运动,通过控制丝杆23的旋转两即可完成悬伸段22b的伸出量,即实现对翼臂的伸长量的调节。
27.本实施例中,还包括用于驱动丝杆23旋转的马达5,所述固定段22a内部中空,所述马达5置于所述固定段22a内部,马达5设置于所述固定段22a中部,固定段22a与丝杆座24形成马达5的保护壳,保护马达5,防尘防水,延长马达5的使用寿命。
28.本实施例中,所述伸缩翼臂22与所述折叠旋翼21之间还设置有用于驱动折叠旋翼21旋转的电机6。
29.本实施例中,所述伸缩翼臂22通过旋块7与所述舵机4转动连接,在收纳翼臂时,舵机4驱动旋块7旋转90
°
即可使翼臂与无人机机身靠紧,进而确保更加节约收纳空间。
30.本实施例中,所述行走轮3为4个,所述行走轮3为球形轮或者滚动轮,球形轮可以让无人机在底面行驶时不受限制转向灵活,滚动轮的通过性更好。
31.本实施例中,所述机身本体1上还设置有用于放置电池及控制器的设备仓1b,所述设备仓1b位于所述储物仓1a的上方,所述设备仓1b与所述储物仓1a固定连接,储物仓1a的设计可以让无人机的作用不止勘测,还能将一些特殊场合急需的物资带到所需的地方,是无人机具备一定的运输能力,设备仓1b内的控制器作为无人机运行时的大脑,与所有的电机、马达5、舵机4及摄像头8都电信号连接,接收指令和发送指令。
32.本实施例中,所述机身本体1上还设置有用于拍摄的摄像头8。
33.本发明公开的一种陆空两用多功能无人机,通过设置可以折叠的旋翼结构2和便于行走的行走轮3,使得本无人机具备陆空两用的优点,同时还设置储物仓1a以满足一定程度的运输能力,既可以空中飞行,全面收集地面信息;也可以在地面行驶,转向便利,所占空间较小,适用于多种场合。
34.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1