一种智能网联车辆信息服务预警系统的制作方法
1.本发明涉及预警系统,具体是一种智能网联车辆信息服务预警系统。
背景技术:
2.预警系统是根据所研究对象的特点,通过收集相关的资料信息,监控风险因素的变动趋势,并评价各种风险状态偏离预警线的强弱程度,向决策层发出预警信号并提前采取预控对策的系统。
3.而随着现有车辆的不断增加,因此发生事故的几率也在逐步增大,因此现有车辆安全研究方向转向至车辆行驶预警系统,然而传统车辆预警系统,只是单纯对车辆速度进行预警,而无法对周边环境进行预警;
4.因此设计一种对周边环境的预警系统,是目前需要解决的一个问题。
技术实现要素:
5.发明目的:提供一种智能网联车辆信息服务预警系统,以解决现有技术存在的上述问题。
6.技术方案:一种智能网联车辆信息服务预警系统,包括:
7.采集端,用于采集周边环境信息;
8.处理端,用于对比采集端采集到的信息;
9.判定端,用于处理采集端采集到的信息;
10.预警端,根据判定端判定后的信息进行发出预警;
11.通过设计处理端和判定端进行对车辆周边环境的处理,通过对比单元进行对比采集到的图像数据,进而给予车辆进行预警,同时通过设计防碰撞判定单元,指示判定单元,进行判定车辆周边环境状态,再由预警端根据判定端判定后的信息进行发出预警,降低车辆在行驶过程中出现的事故。
12.在进一步实施例中,所述采集端包括预先安装在车辆内的若干摄像器和距离传感器所述摄像器用于采集车辆周边环境,距离传感器用于计算车辆之间距离,以及各个车辆的平均速度。
13.在进一步实施例中,所述处理端包括计算单元、图像对比单元及数据库;
14.所述计算单元包括速度计算模块和距离计算模块;
15.所述距离计算模块通过距离传感器记录周边车辆位置信息。
16.所述速度计算模块基于距离计算模块完成对周边车辆速度的计算;
17.截取周边车辆在单位时间内的最初位置和结束位置,得出移动路程,进而再由移动路程与单位时间计算出平均速度;
18.在进一步实施例中,所述图像对比单元包括指示牌对比法和红绿灯对比法;
19.所述指示牌对比法包括:
20.步骤1、通过采集端采集图像信息,并将采集到的信息转化为电信号;
21.步骤2、通过二值化、图像平滑、变换、增强、恢复滤波对图像预处理;
22.步骤3、对预处理后的图像进行特征选择;
23.步骤4、将选择的特征与数据库内预先录入各个图像的特征进行对比。
24.所述红绿灯对比法包括
25.步骤1、通过采集端采集图像信息,并将采集到的信息转化为电信号;
26.步骤2、通过直方图对比法完成对比。
27.在进一步实施例中,所述判定端包括防碰撞判定单元,指示判定单元;
28.防碰撞判定单元
29.定义驾驶车辆为h,前方远车为r;
30.状态一:
31.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以初速度v1、减速度a减速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
32.设计该状态,主要为了避免r突然出现刹车现象,避免h驾驶者注意力不集中出现碰撞事故;
33.状态二:
34.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以速度v1(v1《v0)保持匀速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
35.当v1《v0时,表明h与r在逐步接近,当v1《v0且数值较为接近时,逐步接近的时间则变长,而长时间的逐步接近容易使h驾驶者出现判断疲劳,不知不觉之间发生碰撞,因此设计该种状态,避免这一情况的出现。
36.状态三:
37.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1行驶并突然变道至h所在车道时,判定符合当前状态;
38.设计该状态,避免了车辆变道时,出现碰撞的概率,通过对车辆的变道预警进行预警事故的发生。
39.状态四:
40.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1(v1≤v0)保持匀速行驶时,判定符合当前状态;
41.避免r突然发生变道,当出现此状态时,不进行预警,当r突然发生变道时,则碰撞概率大幅上升,不易避免,因此设计该状态进行防止该种状态的发生。
42.状态五:
43.h以恒定速度v0驶向前方交叉路口(角度α),r在h的任意一侧以恒定速度v1驶向路口并与h相交于p点,h到达p点的时间和距离分别为h
t
、hd,r到达p点的时间和距离分别为r
t
、rd;
44.当h
t
、hd、r
t
、rd均小于设定阈值时,判定具有碰撞风险,符合当前状态;
45.所述阈值可根据刹车反应距离核定。
46.在进一步实施例中,所述指示判定单元包括指示牌判定模块和红绿灯判定模块;
47.所述指示牌判定模块
48.由若干摄像器进行采集行驶车辆周边指示牌,通过图像对比单元与预先录入处理
端内的各个指示牌进行对比,根据对比出相同指示牌给予行驶车辆指示牌信息。
49.通过设计指示牌处理单元给予驾驶者预警提示,由于驾驶者在行驶过程中,容易遗漏车辆周边的指示牌,本发明通过设计指示牌处理单元进行对比,给予驾驶者指示牌信息,避免了驾驶者的驾驶状态与指示牌发生冲突。
50.红绿灯判定模块
51.由若干摄像器进行采集行驶车辆周边红绿色灯信息,通过图像对比单元对比出红绿灯状态,当驾驶者车道为红灯状态时,车辆依旧行驶,判定存在闯红灯风险;
52.而当驾驶者车道为绿灯状态时,车辆依旧停止时,判定存在注意力不集中风险;
53.在进一步实施例中,所述预警端包括设置在车辆内的显示器,所述预警端根据判定端判定各个状态、风险及指示牌信息通过显示器进行给予驾驶者预警。
54.在进一步实施例中,所述预警端与各个道路和服务区大数据平台连通,当服务区内停车位不足或者停止服务时,道路施工或者发生事故时,可以有预警端进行预警。
55.有益效果:本发明公开了一种智能网联车辆信息服务预警系统,本发明通过设计处理端和判定端进行对车辆周边环境的处理,通过对比单元进行对比采集到的图像数据,进而给予车辆进行预警,同时通过设计防碰撞判定单元,指示判定单元,进行判定车辆周边环境状态,再由预警端根据判定端判定后的信息进行发出预警,降低车辆在行驶过程中出现的事故。
附图说明
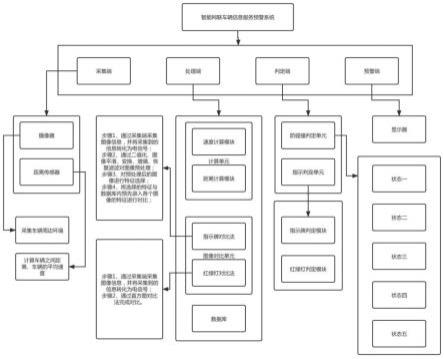
56.图1是本发明的系统流程示意图。
57.图2是发明的状态一示意图。
58.图3是发明的状态二示意图。
59.图4是发明的状态三示意图。
60.图5是发明的状态四示意图。
61.图6是发明的状态五示意图。
具体实施方式
62.经申请人仔细研究,现有车辆预警系统具有(预警车辆发生事故效果不够理想)的问题,其原因在于,随着现有车辆的不断增加,因此发生事故的几率也在逐步增大,因此现有车辆安全研究方向转向至车辆行驶预警系统,然而传统车辆预警系统,只是单纯对车辆速度进行预警,而无法对周边环境进行预警;
63.而本发明通过设计处理端和判定端进行对车辆周边环境的处理,通过对比单元进行对比采集到的图像数据,进而给予车辆进行预警,同时通过设计防碰撞判定单元,指示判定单元,进行判定车辆周边环境状态,再由预警端根据判定端判定后的信息进行发出预警,降低车辆在行驶过程中出现的事故。
64.本发明涉及一种智能网联车辆信息服务预警系统,下面通过具体实施方式进行详细描述。
65.一种智能网联车辆信息服务预警系统,包括:
66.采集端,用于采集周边环境信息;
67.处理端,用于对比采集端采集到的信息;
68.判定端,用于处理采集端采集到的信息;
69.预警端,根据判定端判定后的信息进行发出预警;
70.通过设计处理端和判定端进行对车辆周边环境的处理,通过对比单元进行对比采集到的图像数据,进而给予车辆进行预警,同时通过设计防碰撞判定单元,指示判定单元,进行判定车辆周边环境状态,再由预警端根据判定端判定后的信息进行发出预警,降低车辆在行驶过程中出现的事故。
71.所述采集端包括预先安装在车辆内的若干摄像器和距离传感器所述摄像器用于采集车辆周边环境,距离传感器用于计算车辆之间距离,以及各个车辆的平均速度。
72.所述处理端包括计算单元、图像对比单元及数据库;
73.所述计算单元包括速度计算模块和距离计算模块;
74.所述距离计算模块通过距离传感器记录周边车辆位置信息。
75.所述速度计算模块基于距离计算模块完成对周边车辆速度的计算;
76.截取周边车辆在单位时间内的最初位置和结束位置,得出移动路程,进而再由移动路程与单位时间计算出平均速度;
77.所述图像对比单元包括指示牌对比法和红绿灯对比法;
78.所述指示牌对比法包括:
79.步骤1、通过采集端采集图像信息,并将采集到的信息转化为电信号;
80.步骤2、通过二值化、图像平滑、变换、增强、恢复滤波对图像预处理;
81.步骤3、对预处理后的图像进行特征选择;
82.步骤4、将选择的特征与数据库内预先录入各个图像的特征进行对比。
83.所述红绿灯对比法包括
84.步骤1、通过采集端采集图像信息,并将采集到的信息转化为电信号;
85.步骤2、通过直方图对比法完成对比。
86.所述判定端包括防碰撞判定单元,指示判定单元;
87.防碰撞判定单元
88.定义驾驶车辆为h,前方远车为r;
89.状态一:
90.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以初速度v1、减速度a减速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
91.设计该状态,主要为了避免r突然出现刹车现象,避免h驾驶者注意力不集中出现碰撞事故;
92.状态二:
93.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以速度v1(v1《v0)保持匀速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
94.当v1《v0时,表明h与r在逐步接近,当v1《v0且数值较为接近时,逐步接近的时间则变长,而长时间的逐步接近容易使h驾驶者出现判断疲劳,不知不觉之间发生碰撞,因此设计该种状态,避免这一情况的出现。
95.状态三:
96.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1行驶并突然变道至h所在车道时,判定符合当前状态;
97.设计该状态,避免了车辆变道时,出现碰撞的概率,通过对车辆的变道预警进行预警事故的发生。
98.状态四:
99.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1(v1≤v0)保持匀速行驶时,判定符合当前状态;
100.避免r突然发生变道,当出现此状态时,不进行预警,当r突然发生变道时,则碰撞概率大幅上升,不易避免,因此设计该状态进行防止该种状态的发生。
101.状态五:
102.h以恒定速度v0驶向前方交叉路口(角度α),r在h的任意一侧以恒定速度v1驶向路口并与h相交于p点,h到达p点的时间和距离分别为h
t
、hd,r到达p点的时间和距离分别为r
t
、rd;
103.当h
t
、hd、r
t
、rd均小于设定阈值时,判定具有碰撞风险,符合当前状态;
104.所述阈值可根据刹车反应距离核定。
105.所述指示判定单元包括指示牌判定模块和红绿灯判定模块;
106.所述指示牌判定模块
107.由若干摄像器进行采集行驶车辆周边指示牌,通过图像对比单元与预先录入处理端内的各个指示牌进行对比,根据对比出相同指示牌给予行驶车辆指示牌信息。
108.通过设计指示牌处理单元给予驾驶者预警提示,由于驾驶者在行驶过程中,容易遗漏车辆周边的指示牌,本发明通过设计指示牌处理单元进行对比,给予驾驶者指示牌信息,避免了驾驶者的驾驶状态与指示牌发生冲突。
109.红绿灯判定模块
110.由若干摄像器进行采集行驶车辆周边红绿色灯信息,通过图像对比单元对比出红绿灯状态,当驾驶者车道为红灯状态时,车辆依旧行驶,判定存在闯红灯风险;
111.而当驾驶者车道为绿灯状态时,车辆依旧停止时,判定存在注意力不集中风险;
112.所述预警端包括设置在车辆内的显示器,所述预警端根据判定端判定各个状态、风险及指示牌信息通过显示器进行给予驾驶者预警。
113.在进一步实施例中,所述预警端与各个道路和服务区大数据平台连通,当服务区内停车位不足或者停止服务时,道路施工或者发生事故时,可以有预警端进行预警。
114.工作原理说明:当车辆经过红绿灯时,通过采集端采集图像信息,并将采集到的信息转化为电信号,通过直方图对比法完成对比,由若干摄像器进行采集行驶车辆周边红绿色灯信息,通过图像对比单元对比出红绿灯状态;
115.当驾驶者车道为红灯状态时,车辆依旧行驶,判定存在闯红灯风险;
116.当驾驶者车道为绿灯状态时,车辆依旧停止时,判定存在注意力不集中风险;
117.当车辆经过红绿灯时,由若干摄像器进行采集行驶车辆周边指示牌,通过图像对比单元与预先录入处理端内的各个指示牌进行对比,根据对比出相同指示牌给予行驶车辆指示牌信息;
118.由预警端通过显示器进行给予驾驶者预警,提示驾驶者注意驾驶状态。
119.当驾驶车辆在行驶过程中存在下述状态时;
120.状态一:
121.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以初速度v1、减速度a减速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
122.设计该状态,主要为了避免r突然出现刹车现象,避免h驾驶者注意力不集中出现碰撞事故;
123.状态二:
124.h以速度v0保持匀速行驶,r在h前方同车道距离x1处以速度v1(v1《v0)保持匀速行驶,当h与r之间的相对距离小于s(s《x1)时,判定符合当前状态;
125.当v1《v0时,表明h与r在逐步接近,当v1《v0且数值较为接近时,逐步接近的时间则变长,而长时间的逐步接近容易使h驾驶者出现判断疲劳,不知不觉之间发生碰撞,因此设计该种状态,避免这一情况的出现。
126.状态三:
127.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1行驶并突然变道至h所在车道时,判定符合当前状态;
128.设计该状态,避免了车辆变道时,出现碰撞的概率,通过对车辆的变道预警进行预警事故的发生。
129.状态四:
130.h以速度v0保持匀速行驶,r在h前方相邻车道距离x1(x1≤s)处以速度v1(v1≤v0)保持匀速行驶时,判定符合当前状态;
131.避免r突然发生变道,当出现此状态时,不进行预警,当r突然发生变道时,则碰撞概率大幅上升,不易避免,因此设计该状态进行防止该种状态的发生。
132.状态五:
133.h以恒定速度v0驶向前方交叉路口(角度α),r在h的任意一侧以恒定速度v1驶向路口并与h相交于p点,h到达p点的时间和距离分别为h
t
、hd,r到达p点的时间和距离分别为r
t
、rd;
134.当h
t
、hd、r
t
、rd均小于设定阈值时,判定具有碰撞风险,符合当前状态;
135.由预警端通过显示器进行给予驾驶者预警,提示驾驶者注意驾驶状态。
136.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1