一种基于倾角补偿技术的便携式轨道平顺性测量装置的制作方法
1.本发明涉及轨道平顺性测量装置领域,特别涉及一种基于倾角补偿技术的便携式轨道平顺性测量装置。
背景技术:
2.铁路轨道平顺度是事关车辆运行安全、旅客舒适度评价、提高车辆轨道使用寿命的关键指标。
3.平顺度的评价主要是通过轨道线路弦线测量仪器进行测量和分析的,不断改进弦测仪器是改进平顺度评价、整治及管理的要求。
4.因此,发明一种基于倾角补偿技术的便携式轨道平顺性测量装置来解决上述问题很有必要。
技术实现要素:
5.本发明的目的在于提供一种基于倾角补偿技术的便携式轨道平顺性测量装置,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于倾角补偿技术的便携式轨道平顺性测量装置,包括光源、数字靶及横梁,所述光源包括壳体一,所述壳体一的内部设置有激光器和激光器电池,所述壳体一的内部还设置有内部调节机构,所述内部调节机构的上方对应设置有位置调节旋钮,所述壳体一的底部设置有底板一,所述底板一的一侧设置有侧板一;
7.所述数字靶包括壳体二,所述壳体二的内部设置有接收激光器发出的激光线的数字相机、倾角传感器和cpu,壳体二的内部还设置有数字相机电池,所述壳体二的底部设置有底板二,所述底板二的一侧设置有侧板二;
8.所述横梁包括碳纤维横梁,所述碳纤维横梁的中部设置有中间过度套,所述碳纤维横梁的一端设置有支撑座,另一端设置有快速连接头,所述壳体二的底部一体固定设置有与快速连接头之间对接固定的绝缘套。
9.优选的,所述壳体一的一侧设置有供激光器端部发出的激光线射出的镜片一,所述壳体一的上表面固定设置有把手一,所述壳体一的底部四面位置均设置有第一槽体,所述第一槽体的底部设置有供螺钉穿过并固定在底板一表面的第一螺纹孔。
10.本实施例中,装置采用静态激光弦测法,以准直激光束建立长弦测量基准,配合激光图像数字化识别技术,为轨道的长波平顺性快速检测提供了新的手段;
11.具体的,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行统一坐标变换,传统的基于激光长弦测量装置需要手工严格调平才能正常测量。本装置具有自动倾角补偿功能,不需要数字靶精确调平就可以实现高精度、稳定测量,且整体设备尺寸小,重量轻,便于拆装。
12.数字靶中的数字相机可采集激光光斑图像,实时识别激光光斑在数字靶接收装置
上的位置,倾角传感器可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换,在壳体二的内部还设置有内置无线发射模块,具有在手持终端和主机之间进行无线数据收发功能。
13.优选的,所述壳体二的一侧设置有供数字相机接收激光线的透明镜片二镜片,所述壳体二的上表面固定设置有把手二,所述壳体二的底部四面位置均设置有第二槽体,所述第二槽体的底部设置有供螺钉穿过并固定在底板二表面的第二螺纹孔。
14.需要说明的是,本装置避免了传统全站仪方法的低效率,避免了惯性测量方法的长弦累计误差问题,具有检测精度高、快速、轻便等特点;
15.具体的,光源:提供准直激光束,建立激光长弦测量基准;数字靶:接收激光,通过内置机器视觉自动识别激光光斑位置;同时,在使用时还配置有手持终端,手持终端与数字靶无线通讯并采集数据,内置数据采集处理软件,对原始检测数据进行实时处理,并能显示轨向、高低曲线和数据表格;
16.本装置具备以下功能:
17.矢距测量:基于激光长弦直接测量法,同时测量轨向、高低值;
18.测量线路:直线、道岔、平面曲线、竖曲线;
19.变弦功能:可将长弦测量结果换算成短弦:10m弦、20m弦结果;
20.实时监测功能:为现场起拨道作业提供实时拨道量监测;
21.数据贮存及导出:手持终端测量数据可导出到电脑端进行存储管理;
22.数据的无线传输:基于无线手持终端管理,支持2.4g无线wifi数据传输;
23.应用范围:高铁、普铁、城市轨道适用。
24.参考图11中所示,在一测站范围内,建立激光弦线基准;通过移动数字靶,在各测点位置上测量轨道与基准线水平、垂向偏差值。
25.参考图12中所示,在手持终端上进行计算,建立虚拟弦线,使首尾两点水平、垂向偏差值归零;中间各测点计算后的偏差值就是该测点的轨向、高低值,图12中只模拟轨向的偏差效果,高低偏差类推。
26.壳体一和壳体二的底部均通过对应位置的螺钉穿过第一螺纹孔或第二螺纹孔固定在对应的底板一和底板二上,固定方便,且第一螺纹孔、第二螺纹孔分别设置在第一槽体、第二槽体中,避免了外部结构突出的现象,且第一槽体、第二槽体具有供风力进入的目的,使得潮湿环境中的风力经过第一槽体、第二槽体的导向从对应的壳体一和壳体二底部排出,不会进入壳体一和壳体二的内部产生湿气严重的现象,而风力通过第一槽体、第二槽体时对相应的光源和数字靶具有良好的散热效果,第一槽体和第二槽体的设置一物三用,功能性强。
27.优选的,所述壳体一和壳体二的底部均设置有固定座,所述固定座的内部设置有四组空心槽,四组空心槽之间通过隔板隔离,所述隔板的表面设置有供螺钉穿过时将壳体一、壳体二固定在对应的固定座上的预留孔。
28.进一步的,基于壳体一和壳体二底部的固定座中均设置有空心槽,使得从第一槽体、第二槽体处进入的风力可作用在空心槽中,从而从壳体一或者壳体二的底部将热量快速排出,且隔离在空心槽之间的隔板底部设置有供风力通过的连通风孔,风力可快速将热量带出,且固定座的内部形成四组循环的风道,具有吸引导向风力通过的目的。
29.参考图13中所示,换站搭接测量操作,如果待测路线长度大于一测站工作距离,需要换站搭接测量。
30.在上一测站结束后,定义下一测站范围。下一测站的首点应该设置在上一测站之内,距离上一测站尾点不少于10m的位置。实现“搭接测量”的方式。
31.在下一测站中,按照一测站测量方式进行完整测量,重复第2站可实现多站搭接测量。
32.装置中所能实现的一些技术指标:
33.测量范围:直线、道岔单站测程不超过80m;
34.圆曲线(缓和曲线)半径≥8000m时,单站测程80m;
35.竖曲线半径r≥14000m时,单站测程80m;
36.适用线路:直线、道岔、平面曲线、竖曲线;
37.测量精度:准确度等级:0级;
38.轨向、高低基本误差:
±
0.30mm;
39.轨向、高低测量重复性:≤0.20mm;
40.轨向、高低矢距示值误差:
±
0.50mm(弦长80m时);
41.轨向、高低矢距测量重复性:≤0.35mm(弦长80m时);
42.其它参数:数字靶轨向量程:
±
50mm;
43.数字靶高低量程:
±
30mm;
44.数字靶分辨率:0.01mm;
45.激光出瞳功率:≤15mw;
46.激光波长:658nm;
47.光源内置锂电池容量:3200mah;
48.数字靶内置锂电池容量:6400mah;
49.工作电压:5v;
50.仪器重量:约7kg;
51.装箱尺寸:45*30*16(cm);
52.工作时间:一次充电工作8小时以上。
53.优选的,所述固定座的底部固定在对应的底板一和底板二上,所述底板二上的固定座通过穿过第二螺纹孔的螺钉固定在底板二的表面,所述底板一上的固定座通过穿过第一螺纹孔的螺钉固定在底板一的表面。
54.具体的,本装置不仅适用于工务检测部门进行轨道平顺度检测,也适用于线路维修部门,为起拨道作业提供作业基准,并提供实时的优化方案;
55.其中,光源中的位置调节旋钮和内部调节机构为通过竖轴和横轴一体式激光发射器支架,能够实现激光指向上下、左右调整功能,激光器能够发出激光束,整体设备搭配软件使用,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换;具有轨向、高低、超高等测量功能;可以实现软件设站,首尾归零及标定功能;具有轨道长弦平顺性测量和起拨道监测功能;具有搭接测量功能。
56.优选的,所述底板二上的第二槽体与其上方固定座中的空心槽连通,所述底板一上的第一槽体与其上方固定座中的空心槽连通,所述空心槽中设置有冷却吸湿组件。
57.其中,冷却吸湿组件能给设备进行冷却的同时吸出周围空气中的湿气,避免湿气对设备造成的影响。
58.优选的,所述冷却吸湿组件包括冷却机构和吸湿机构,所述隔板的底部设置有连通在相邻两组之间的连通风孔,所述冷却机构设置于连通风孔中,所述吸湿机构设置于空心槽内部并阻挡在连通风孔连通固定座外部的位置。
59.装置中,在连通风孔中设置有动力单元,动力单元驱动动力轴转动时,动力轴外圈处的扇叶转动,使得风力流通的速度更快,从而增加对风流的导向性和对设备的散热性,而动力单元可使用小型电机等装置,动力单元电池可使用直流电池等装置。
60.优选的,所述冷却机构包括设置于连通风孔中的支撑架,所述支撑架呈十字形结构,支撑架的外圈固定设置有一圈橡胶圈,所述橡胶圈的外圈固定在连通风孔的内壁上,所述支撑架的表面固定设置有动力单元和给动力单元供电的动力单元电池,所述动力单元的端部传动连接有动力轴,所述动力轴上固定设置有扇叶。
61.工作时,动力单元底部的支撑架通过周围的橡胶圈固定在连通风孔内壁上,动力单元工作时产生的振动力不会传递到隔板上,使得整体设备不会受震动影响,且橡胶圈具有一定的缓冲减震能力,也具有一定的强度,具体的,橡胶圈的内外径之差较小,使得动力单元整体能够保持稳定的同时不将振动力传递给设备上,支撑架周围和橡胶圈内圈之间形成供风力通过的风槽。
62.优选的,所述吸湿组件包括同时贯穿除湿隔板两侧面的除湿风孔,所述除湿风孔上下分布有多组,所述除湿风孔中固定设置有吸湿棉块。
63.在实际使用时,空气经过除湿风孔位置时被吸湿棉块吸出湿气,使得设备周围空气潮湿度降低,避免湿气对设备造成的影响。
64.优选的,所述底板一和侧板一之间组成l字形结构,所述底板二和侧板二之间组成l字形结构。
65.需要注意的是,底板一和侧板一之间组成l字形结构,底板二和侧板二之间组成l字形结构,方便卡合安装在轨道上,方便使用。
66.本发明的技术效果和优点:
67.1、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,包括光源、数字靶及横梁,装置采用静态激光弦测法,以准直激光束建立长弦测量基准,配合激光图像数字化识别技术,为轨道的长波平顺性快速检测提供了新的手段;
68.2、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行统一坐标变换,传统的基于激光长弦测量装置需要手工严格调平才能正常测量。本装置具有自动倾角补偿功能,不需要数字靶精确调平就可以实现高精度、稳定测量,且整体设备尺寸小,重量轻,便于拆装;
69.3、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,数字靶中的数字相机可采集激光光斑图像,实时识别激光光斑在数字靶接收装置上的位置,倾角传感器可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换,在壳体二的内部还设置有内置无线发射模块,具有在手持终端和主机之间进行无线数据收发功能;
70.4、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,本装置避免了
传统全站仪方法的低效率,避免了惯性测量方法的长弦累计误差问题,具有检测精度高、快速、轻便等特点;
71.5、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,壳体一和壳体二的底部均通过对应位置的螺钉穿过第一螺纹孔或第二螺纹孔固定在对应的底板一和底板二上,固定方便,且第一螺纹孔、第二螺纹孔分别设置在第一槽体、第二槽体中,避免了外部结构突出的现象,且第一槽体、第二槽体具有供风力进入的目的,使得潮湿环境中的风力经过第一槽体、第二槽体的导向从对应的壳体一和壳体二底部排出,不会进入壳体一和壳体二的内部产生湿气严重的现象,而风力通过第一槽体、第二槽体时对相应的光源和数字靶具有良好的散热效果,第一槽体和第二槽体的设置一物三用,功能性强;
72.6、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,本装置不仅适用于工务检测部门进行轨道平顺度检测,也适用于线路维修部门,为起拨道作业提供作业基准,并提供实时的优化方案;
73.7、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,光源中的位置调节旋钮和内部调节机构为通过竖轴和横轴一体式激光发射器支架,能够实现激光指向上下、左右调整功能,激光器能够发出激光束,整体设备搭配软件使用,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换;具有轨向、高低、超高等测量功能;可以实现软件设站,首尾归零及标定功能;具有轨道长弦平顺性测量和起拨道监测功能;具有搭接测量功能;
74.8、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,动力单元驱动动力轴转动时,动力轴外圈处的扇叶转动,使得风力流通的速度更快,从而增加对风流的导向性和对设备的散热性;
75.9、本发明的一种基于倾角补偿技术的便携式轨道平顺性测量装置,动力单元底部的支撑架通过周围的橡胶圈固定在连通风孔内壁上,动力单元工作时产生的振动力不会传递到隔板上,使得整体设备不会受震动影响,且橡胶圈具有一定的缓冲减震能力,也具有一定的强度,具体的,橡胶圈的内外径之差较小,使得动力单元整体能够保持稳定的同时不将振动力传递给设备上,支撑架周围和橡胶圈内圈之间形成供风力通过的风槽。
附图说明
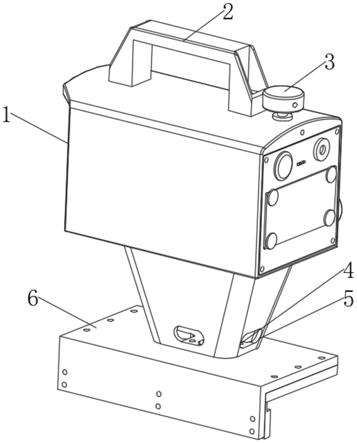
76.图1为本发明光源外部结构示意图。
77.图2为本发明光源内部结构示意图。
78.图3为本发明数字靶外部结构示意图。
79.图4为本发明数字靶内部结构示意图。
80.图5为本发明碳纤维横梁结构示意图。
81.图6为本发明固定座结构示意图。
82.图7为本发明固定座剖视图。
83.图8为本发明连通风孔结构示意图。
84.图9为本发明除湿隔板结构示意图。
85.图10为本发明支撑架正面结构示意图。
86.图11为本发明平顺性测量时的状态一原理图。
87.图12为本发明平顺性测量时的状态二原理图。
88.图13为本发明搭接测量时的原理图。
89.图中:壳体一1、把手一2、位置调节旋钮3、第一螺纹孔4、第一槽体5、底板一6、激光器7、激光器电池8、内部调节机构9、侧板一10、壳体二11、把手二12、绝缘套13、底板二14、第二槽体15、第二螺纹孔16、数字相机电池17、数字相机18、倾角传感器19、cpu20、侧板二21、风槽22、碳纤维横梁23、中间过度套24、支撑座25、固定座26、空心槽27、预留孔28、隔板29、连通风孔30、除湿隔板31、除湿风孔32、吸湿棉块33、动力单元电池34、支撑架35、橡胶圈36、动力单元37、动力轴38、扇叶39。
具体实施方式
90.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
91.本发明提供了如图1-13所示的一种基于倾角补偿技术的便携式轨道平顺性测量装置,包括光源、数字靶及横梁,所述光源包括壳体一1,所述壳体一1的内部设置有激光器7和激光器电池8,所述壳体一1的内部还设置有内部调节机构9,所述内部调节机构9的上方对应设置有位置调节旋钮3,所述壳体一1的底部设置有底板一6,所述底板一6的一侧设置有侧板一10;
92.所述数字靶包括壳体二11,所述壳体二11的内部设置有接收激光器7发出的激光线的数字相机18、倾角传感器19和cpu20,壳体二11的内部还设置有数字相机电池17,所述壳体二11的底部设置有底板二14,所述底板二14的一侧设置有侧板二21;
93.所述横梁包括碳纤维横梁23,所述碳纤维横梁23的中部设置有中间过度套24,所述碳纤维横梁23的一端设置有支撑座25,另一端设置有快速连接头,所述壳体二11的底部一体固定设置有与快速连接头之间对接固定的绝缘套13。
94.所述壳体一1的一侧设置有供激光器7端部发出的激光线射出的镜片一,所述壳体一1的上表面固定设置有把手一2,所述壳体一1的底部四面位置均设置有第一槽体5,所述第一槽体5的底部设置有供螺钉穿过并固定在底板一6表面的第一螺纹孔4。
95.本实施例中,装置采用静态激光弦测法,以准直激光束建立长弦测量基准,配合激光图像数字化识别技术,为轨道的长波平顺性快速检测提供了新的手段;
96.具体的,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行统一坐标变换,传统的基于激光长弦测量装置需要手工严格调平才能正常测量。本装置具有自动倾角补偿功能,不需要数字靶精确调平就可以实现高精度、稳定测量,且整体设备尺寸小,重量轻,便于拆装。
97.数字靶中的数字相机18可采集激光光斑图像,实时识别激光光斑在数字靶接收装置上的位置,倾角传感器19可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换,在壳体二11的内部还设置有内置无线发射模块,具有在手持终端和主机之间进行无线数据收发功能。
98.所述壳体二11的一侧设置有供数字相机18接收激光线的透明镜片二镜片,所述壳
体二11的上表面固定设置有把手二12,所述壳体二11的底部四面位置均设置有第二槽体15,所述第二槽体15的底部设置有供螺钉穿过并固定在底板二14表面的第二螺纹孔16。
99.需要说明的是,本装置避免了传统全站仪方法的低效率,避免了惯性测量方法的长弦累计误差问题,具有检测精度高、快速、轻便等特点;
100.具体的,光源:提供准直激光束,建立激光长弦测量基准;数字靶:接收激光,通过内置机器视觉自动识别激光光斑位置;同时,在使用时还配置有手持终端,手持终端与数字靶无线通讯并采集数据,内置数据采集处理软件,对原始检测数据进行实时处理,并能显示轨向、高低曲线和数据表格;
101.本装置具备以下功能:
102.矢距测量:基于激光长弦直接测量法,同时测量轨向、高低值;
103.测量线路:直线、道岔、平面曲线、竖曲线;
104.变弦功能:可将长弦测量结果换算成短弦:10m弦、20m弦结果;
105.实时监测功能:为现场起拨道作业提供实时拨道量监测;
106.数据贮存及导出:手持终端测量数据可导出到电脑端进行存储管理;
107.数据的无线传输:基于无线手持终端管理,支持2.4g无线wifi数据传输;
108.应用范围:高铁、普铁、城市轨道适用。
109.参考图11中所示,在一测站范围内,建立激光弦线基准;通过移动数字靶,在各测点位置上测量轨道与基准线水平、垂向偏差值。
110.参考图12中所示,在手持终端上进行计算,建立虚拟弦线,使首尾两点水平、垂向偏差值归零;中间各测点计算后的偏差值就是该测点的轨向、高低值,图12中只模拟轨向的偏差效果,高低偏差类推。
111.壳体一1和壳体二11的底部均通过对应位置的螺钉穿过第一螺纹孔4或第二螺纹孔16固定在对应的底板一6和底板二14上,固定方便,且第一螺纹孔4、第二螺纹孔16分别设置在第一槽体5、第二槽体15中,避免了外部结构突出的现象,且第一槽体5、第二槽体15具有供风力进入的目的,使得潮湿环境中的风力经过第一槽体5、第二槽体15的导向从对应的壳体一1和壳体二11底部排出,不会进入壳体一1和壳体二11的内部产生湿气严重的现象,而风力通过第一槽体5、第二槽体15时对相应的光源和数字靶具有良好的散热效果,第一槽体5和第二槽体15的设置一物三用,功能性强。
112.所述壳体一1和壳体二11的底部均设置有固定座26,所述固定座26的内部设置有四组空心槽27,四组空心槽27之间通过隔板29隔离,所述隔板29的表面设置有供螺钉穿过时将壳体一1、壳体二11固定在对应的固定座26上的预留孔28。
113.进一步的,基于壳体一1和壳体二11底部的固定座26中均设置有空心槽27,使得从第一槽体5、第二槽体15处进入的风力可作用在空心槽27中,从而从壳体一1或者壳体二11的底部将热量快速排出,且隔离在空心槽27之间的隔板29底部设置有供风力通过的连通风孔30,风力可快速将热量带出,且固定座26的内部形成四组循环的风道,具有吸引导向风力通过的目的。
114.参考图13中所示,换站搭接测量操作,如果待测路线长度大于一测站工作距离,需要换站搭接测量。
115.在上一测站结束后,定义下一测站范围。下一测站的首点应该设置在上一测站之
内,距离上一测站尾点不少于10m的位置。实现“搭接测量”的方式。
116.在下一测站中,按照一测站测量方式进行完整测量,重复第2站可实现多站搭接测量。
117.装置中所能实现的一些技术指标:
118.测量范围:直线、道岔单站测程不超过80m;
119.圆曲线(缓和曲线)半径≥8000m时,单站测程80m;
120.竖曲线半径r≥14000m时,单站测程80m;
121.适用线路:直线、道岔、平面曲线、竖曲线;
122.测量精度:准确度等级:0级;
123.轨向、高低基本误差:
±
0.30mm;
124.轨向、高低测量重复性:≤0.20mm;
125.轨向、高低矢距示值误差:
±
0.50mm(弦长80m时);
126.轨向、高低矢距测量重复性:≤0.35mm(弦长80m时);
127.其它参数:数字靶轨向量程:
±
50mm;
128.数字靶高低量程:
±
30mm;
129.数字靶分辨率:0.01mm;
130.激光出瞳功率:≤15mw;
131.激光波长:658nm;
132.光源内置锂电池容量:3200mah;
133.数字靶内置锂电池容量:6400mah;
134.工作电压:5v;
135.仪器重量:约7kg;
136.装箱尺寸:45*30*16(cm);
137.工作时间:一次充电工作8小时以上。
138.所述固定座26的底部固定在对应的底板一6和底板二14上,所述底板二14上的固定座26通过穿过第二螺纹孔16的螺钉固定在底板二14的表面,所述底板一6上的固定座26通过穿过第一螺纹孔4的螺钉固定在底板一6的表面。
139.具体的,本装置不仅适用于工务检测部门进行轨道平顺度检测,也适用于线路维修部门,为起拨道作业提供作业基准,并提供实时的优化方案;
140.其中,光源中的位置调节旋钮3和内部调节机构9为通过竖轴和横轴一体式激光发射器支架,能够实现激光指向上下、左右调整功能,激光器7能够发出激光束,整体设备搭配软件使用,基于倾角补偿技术,可以实时测量数字靶倾斜状态,对测点轨向、高低测量值进行坐标变换;具有轨向、高低、超高等测量功能;可以实现软件设站,首尾归零及标定功能;具有轨道长弦平顺性测量和起拨道监测功能;具有搭接测量功能。
141.所述底板二14上的第二槽体15与其上方固定座26中的空心槽27连通,所述底板一6上的第一槽体5与其上方固定座26中的空心槽27连通,所述空心槽27中设置有冷却吸湿组件。
142.其中,冷却吸湿组件能给设备进行冷却的同时吸出周围空气中的湿气,避免湿气对设备造成的影响。
143.所述冷却吸湿组件包括冷却机构和吸湿机构,所述隔板29的底部设置有连通在相邻两组之间的连通风孔30,所述冷却机构设置于连通风孔30中,所述吸湿机构设置于空心槽27内部并阻挡在连通风孔30连通固定座26外部的位置。
144.装置中,在连通风孔30中设置有动力单元37,动力单元37驱动动力轴38转动时,动力轴38外圈处的扇叶39转动,使得风力流通的速度更快,从而增加对风流的导向性和对设备的散热性,而动力单元37可使用小型电机等装置,动力单元电池34可使用直流电池等装置。
145.所述冷却机构包括设置于连通风孔30中的支撑架35,所述支撑架35呈十字形结构,支撑架35的外圈固定设置有一圈橡胶圈36,所述橡胶圈36的外圈固定在连通风孔30的内壁上,所述支撑架35的表面固定设置有动力单元37和给动力单元37供电的动力单元电池34,所述动力单元37的端部传动连接有动力轴38,所述动力轴38上固定设置有扇叶39。
146.工作时,动力单元37底部的支撑架35通过周围的橡胶圈36固定在连通风孔30内壁上,动力单元37工作时产生的振动力不会传递到隔板29上,使得整体设备不会受震动影响,且橡胶圈36具有一定的缓冲减震能力,也具有一定的强度,具体的,橡胶圈36的内外径之差较小,使得动力单元37整体能够保持稳定的同时不将振动力传递给设备上,支撑架35周围和橡胶圈36内圈之间形成供风力通过的风槽22。
147.所述吸湿组件包括同时贯穿除湿隔板31两侧面的除湿风孔32,所述除湿风孔32上下分布有多组,所述除湿风孔32中固定设置有吸湿棉块33。
148.在实际使用时,空气经过除湿风孔32位置时被吸湿棉块33吸出湿气,使得设备周围空气潮湿度降低,避免湿气对设备造成的影响。
149.所述底板一6和侧板一10之间组成l字形结构,所述底板二14和侧板二21之间组成l字形结构。
150.需要注意的是,底板一6和侧板一10之间组成l字形结构,底板二14和侧板二21之间组成l字形结构,方便卡合安装在轨道上,方便使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1