一种融合车辆实际运行能力的目标速度计算方法与流程
1.本发明属于轨道交通技术领域,具体涉及一种融合车辆实际运行能力的目标速度计算方法。
背景技术:
2.为了实现自动速度控制,ato会根据线路限速、atp的eb限制速度、前方目标降速点信息、前方站台目标停车点信息,结合车辆的加/减速度参数值与乘客舒适度,实时计算一个用于跟随的最高运行目标曲线。
3.ato在计算最高运行目标曲线时,用的加/减速度值是车辆给的静态参数。而在实际控车过程中,输出的牵引制动控制量达到的效果是根据车辆速度的变化来推测的,后续的速度控制策略也是根据当前实际速度与最高运行目标曲线的关系来实时调整的。在这样一个过程中,在速度曲线的计算和跟随方面可能会有两个明显的缺陷:第一,牵引特性或故障带来的效率和能力问题;第二,制动特性或故障带来的超速或过停问题。
技术实现要素:
4.本发明所要解决的技术问题就是提供一种融合车辆实际运行能力的目标速度计算方法,解决:第一,牵引特性或故障带来的效率和能力问题;第二,制动特性或故障带来的超速或过停问题。
5.为解决上述技术问题,本发明采用如下技术方案:
6.一种融合车辆实际运行能力的目标速度计算方法,包括如下步骤:
7.获取列车实时的牵引、制动状态;
8.在巡航和惰行阶段,ato根据列车的牵引能力来实时计算和更新当前最高限制速度和eb限制速度可达到的最小差值,并根据最小差值生成ato最高运行目标曲线;
9.在制动阶段和站停阶段,如果列车有部分制动的丢失,带来了制动能力的下降,ato根据列车当前的制动能力来实时调整制动和站停曲线。
10.优选的,ato最高运行目标曲线等于当前atp的eb限制速度减去最小差值,若减完之后为负值,则曲线值设置为零。
11.优选的,ato最高目标速度与eb限制速度的最小差值,初始使用配置值。
12.优选的,ato根据列车当前的制动能力来实时调整制动和站停曲线的方法为:首先,ato根据列车到停车点的距离和高度差,根据能量守恒公式v
t2
–v02
=2as+gh,计算当前位置所对应的制动曲线值v
t
,
13.其中,a为ato默认的制动减速度,g为重力加速度,s和h分别为列车到目标点的距离及高度差,v0表示目标点的ato目标速度;
14.当前制动能力大于a的默认取值时,按照a的默认取值来计算制动曲线值v
t
;当前制动能力小于a的默认取值时,按照获取到的制动能力值来计算制动曲线值v
t
。
15.本发明采用的技术方案,利用车辆接口获取实时的牵引制动状态,并基于实时牵
引制动状态计算ato最高目标速度和制动曲线,具有如下有益效果:
16.1、根据实时的牵引和制动状态,提早规划曲线,防止速度反馈带来的滞后控制。
17.2、利用牵引特性,在区间巡航阶段提高巡航速度,提升旅行速度,缩短行车间隔。
18.本发明的具体技术方案及其有益效果将会在下面的具体实施方式中结合附图进行详细的说明。
附图说明
19.下面结合附图和具体实施方式对本发明作进一步描述:
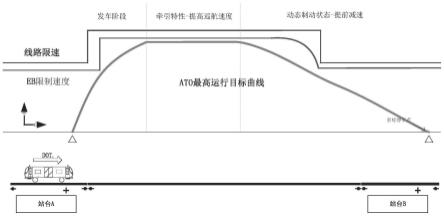
20.图1为典型的站间运行曲线示意图;
21.图2为根据牵引特性和动态制动状态的实时结合之后曲线变化示意图;
22.图3为根据动态牵引状态的实时结合之后曲线示意图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.ato(英文称automatic train operation)列车自动运行装置,也称作列车自动驾驶系统。ato的主要功能为:可以实现列车的加速、巡航、减速、精确停车以及停车后自动开启车门和站台安全门。
25.列车自动保护系统(automatic train protection,简称:atp),是列车自动控制(atc)系统的子系统,也是确保列车安全运行,实现超速防护的关键设备。
26.本发明的前提是能够通过车辆接口获取车辆实时的牵引制动特性。结合车辆的实时牵引制动特性,ato计算的最高运行目标曲线应该是一个可能有变化的,符合车辆牵引制动特性的一个目标曲线。
27.如图1所示,典型的站间运行曲线可以分为发车阶段、巡航/惰行阶段、制动阶段和站台停车阶段。本发明主要起作用的是巡航/惰行阶段、制动阶段和站停阶段。牵引阶段:列车加速,发动机处于耗能状态。巡航阶段:列车匀速,列车所受合力为0,列车是需要牵引还是需要制动取决于列车当时受到的总阻力。惰行阶段:列车既不牵引也不制动,列车运行状态取决于受到的列车总阻力,发动机不耗能。制动阶段:列车减速,发动机不耗能。
28.在巡航/惰行阶段,考虑的是车辆的一个牵引能力的特性,一般当速度高于60km/h的时候,车辆的牵引能力将逐渐下降,在速度达到80km/h的时候,可能最大加速度率仅是低速时的一半。而在低速时候,可能由于部分牵引系统的故障,也会带来牵引能力的下降。基于此,ato将根据车辆的牵引能力来实时计算和eb限速速度之间的差值:
29.因此,本发明融合车辆实际运行能力的目标速度计算方法,包括如下步骤:
30.获取列车实时的牵引、制动状态;
31.在巡航和惰行阶段,ato根据列车的牵引能力来实时计算和更新当前最高限制速度和eb限制速度可达到的最小差值,并根据最小差值生成ato最高运行目标曲线;
32.在制动阶段和站停阶段,如果列车有部分制动的丢失,带来了制动能力的下降,ato根据列车当前的制动能力来实时调整制动和站停曲线。
33.首先,在巡航和惰行阶段,
34.1)ato最高目标速度与eb限制速度的最小差值,初始使用配置值。
35.2)在运行过程中,ato通过车辆接口获取当前的牵引能力后,实时计算和更新当前最高限制速度和eb限制速度可到达的最小差值。
36.3)ato最高运行目标曲线等于当前atp的eb限制速度减去最小差值(若减完之后为负值,则曲线值设置为零)。
37.接着,在制动阶段和站停阶段,有一个共同考虑的因素:车辆的制动能力。假设车辆有部分制动的丢失,带来了制动能力的下降,那ato应根据车辆当前的制动能力来实时调整制动和站停曲线:
38.1)ato根据列车到停车点的距离和高度差,根据能量守恒公式vt2
–
v02=2as+gh计算当前位置所对应的制动曲线值vt。其中,a为ato默认的制动减速度,一般取值0.6m/s/s,g为重力加速度,s和h分别为列车到目标点的距离及高度差,v0表示目标点的ato目标速度。
39.2)当从车辆接口获取到当前制动能力大于a的默认取值时,ato制动曲线按默认取值使用以上公式计算制动曲线。
40.3)当从车辆接口获取到当前制动能力小于a的默认取值时,ato应按照获取到的制动能力值来计算制动曲线。
41.经过根据牵引特性和动态制动状态(比如制动减速度损失)的实时结合之后,曲线变化如图2示意:
42.经过根据动态牵引状态(比如牵引加速度损失)的实时结合之后,曲线变化如图3示意。
43.因此,本发明可以根据实时的牵引和制动状态,提早规划曲线,防止速度反馈带来的滞后控制。并且可以利用牵引特性,在区间巡航阶段提高巡航速度,提升旅行速度,缩短行车间隔。
44.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,熟悉该本领域的技术人员应该明白本发明包括但不限于上面具体实施方式中描述的内容。任何不偏离本发明的功能和结构原理的修改都将包括在权利要求书的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1