一种电动助力转向装置及其控制方法与流程
1.本技术涉及车辆工程技术领域,尤其涉及一种电动助力转向装置及其控制方法。
背景技术:
2.在车辆结构中,由方向盘到车轮的动力传递系统称为转向系统。在车辆行驶时,转向系统用于保持或者改变汽车行驶方向。现如今,车辆多采用电动助力转向系统。传统的电动助力转向系统通常采用非冗余设计,即仅包含一个电子控制单元ecu和一个电机,并采用一路电源进行供电。当电动助力转向系统中的任何一个节点发生故障时,可以关闭系统,完全由人工提供转向力。然而,随着自动驾驶技术的发展,特别是高等级驾驶辅助系统(advanced driving assistant system,adas)的应用,非冗余设计的电动助力转向系统已经无法满足汽车行驶的安全性要求。
3.目前,l4等级的自动驾驶要求电动助力转向系统的冗余能力需达到75%,即电动助力转向系统在某些节点出现故障时,能够继续维持75%的转向助力。然而目前的电动助力转向系统的冗余设计方案,有的达不到l4等级的冗余能力要求,有的采用了复杂的驱动电路、多路电源(4路及以上)和复杂的控制逻辑设计,故障节点多且不利于实施。
技术实现要素:
4.本技术提供了一种电动助力转向装置及其控制方法,能够满足l4等级的自动驾驶对电动助力转向的冗余能力要求,并且结构简单,易于实施。
5.第一方面,本技术提供了一种电动助力转向装置,包括第一电机,用于提供与方向盘的转动相对应的转向助力,第一电机由两路电源供电,两路电源中的每一路电源驱动第一电机产生转向助力的一部分;第二电机,用于在第一电机失去部分或者全部转向助力时,提供与方向盘的转动相对应的额外的转向助力,额外的转向助力包括第一电机失去的转向助力中的至少一部分,其中,第二电机由两路电源耦合成的一路电源驱动,以产生额外的转向助力。由此,当电动助力装置发生单点故障使得第一电机失去一路电源的驱动时,第一电机仍然可以提供50%的转向助力,这样,第二电机只需提供25%的转向助力,就能够使电动助力装置继续维持75%的转向助力输出,从而满足l4等级的冗余能力要求。
6.在一种实现方式中,第一电机包括6相绕组,该电动助力转向装置还包括;第一控制单元,用于耦合至两路电源中的第一路电源,以及将第一路电源输出至6相绕组中的其中3相绕组;第二控制单元,用于耦合至两路电源中的第二路电源,以及将第二路电源输出至6相绕组中的另外3相绕组。由此,电动助力装置的电机总相数仅为9相,结构简单,易于实施。
7.在一种实现方式中,隔离供电单元,用于将两路电源耦合成一路电源;第三控制单元,用于耦合至隔离供电单元,以及将隔离供电单元耦合后的一路电源输出至第二电机。由此,第二电机使用第一路电源和第二路电源耦合后的电源供电,当第一路电源和第二路电源中的任何一路发生故障时,都不会对第二电机的驱动造成影响。
8.在一种实现方式中,第一控制单元,还用于获取来自扭矩角度传感器tas的第一
tas 信号;第二控制单元,还用于获取来自扭矩角度传感器tas的第二tas信号;其中,第一tas信号和第二tas信号指示方向盘转动的角度和/或扭矩。由此,控制单元可以根据tas 信号和can信号判断电动助力装置是否发生单点故障。
9.在一种实现方式中,第一控制单元,还用于获取来自控制器局域网can的第一can信号,以及判断第一can信号是否正常;第二控制单元,还用于获取来自控制器局域网can 的第二can信号,以及判断第二can信号是否正常;第一控制单元或第二控制单元,还用于判断第一tas信号和第二tas信号是否正常。
10.在一种实现方式中,第一控制单元和/或第二控制单元,还用于当第一tas信号、第二 tas信号、第一can信号和第二can信号中的至少一个故障时,向车辆的工控机发送第一指示信号,以使得工控机降低车辆的自动驾驶等级,以提高行驶安全性。
11.在一种实现方式中,第一控制单元,还用于获取来自电机转子位置传感器mps的第一 mps信号;第二控制单元,还用于获取来自电机转子位置传感器mps的第二mps信号;其中,第一mps信号和第二mps信号指示第一电机的转子位置。由此,控制单元可以根据mps 信号第一电机是否发生故障。
12.在一种实现方式中,当第一tas信号、第二tas信号、第一can信号和第二can信号均正常时,第一控制单元,还用于判断第一mps信号和第一路电源是否正常;第二控制单元,还用于判断第二mps信号和第二路电源是否正常;第一控制单元和/或第二控制单元,还用于判断第一电机是否正常。
13.在一种实现方式中,当第一tas信号、第二tas信号、第一can信号和第二can信号均正常时,第一控制单元,还用于判断自身是否正常;第二控制单元,还用于判断自身是否正常。
14.在一种实现方式中,当第一tas信号、第二tas信号、第一can信号和第二can信号均正常时,第一控制单元,还用于通过控制器局域网can的第三can信号与第二控制单元进行通信,以判断第二控制单元是否正常;第二控制单元,还用于通过第三can信号与第一控制单元进行通信,以判断第一控制单元是否正常。
15.在一种实现方式中,当第一tas信号、第二tas信号、第一can信号和第二can信号均正常时,第三控制单元,还用于通过第三can信号与第一控制单元进行通信,以判断第一控制单元是否正常;第三控制单元,还用于通过第三can信号与第二控制单元进行通信,以判断第二控制单元是否正常。
16.在一种实现方式中,第三控制单元,还用于当第一mps信号、第二mps信号、第一控制单元、第二控制单元、第一路电源201、第二路电源202和第一电机中的至少一个故障时,启动第二电机,以提供额外的转向助力,使电动助力装置继续维持75%的转向助力输出,从而满足l4等级的冗余能力要求。
17.在一种实现方式中,第三控制单元还用于当第一电机的其中3相绕组和/或第一控制单元故障,并且,第一电机的另外3相绕组和/或第二控制单元故障时,向车辆的工控机发送第二指示信号,以使得工控机控制车辆停车,以避免事故发生。
18.在一种实现方式中,第三控制单元还用于当第一电机的其中3相绕组和/或第一控制单元故障,并且,第一电机的另外3相绕组和第二控制单元正常时,向车辆的工控机发送第一指示信号,以使得工控机降低车辆的自动驾驶等级,以提高行驶安全性。
19.在一种实现方式中,第三控制单元还用于当第一电机的其中3相绕组和第一控制单元正常,并且,第一电机的另外3相绕组和/或第二控制单元故障时,向车辆的工控机发送第一指示信号,以使得工控机降低车辆的自动驾驶等级,以提高行驶安全性。
20.在一种实现方式中,第一控制单元,用于获取第一路电源的电压,根据第一路电源的电压判断第一路电源是否正常;第二控制单元,用于获取第二路电源的电压,根据第二路电源的电压判断第二路电源是否正常。
21.在一种实现方式中,第一控制单元,用于获取其中3相绕组的输入电流,根据其中3相绕组的输入电流和/或第一mps信号判断第一电机是否正常;第二控制单元,用于获取另外3 相绕组的输入电流,根据另外3相绕组的输入电流和/或第二mps信号判断第一电机是否正常。
22.第二方面,本技术提供了一种控制方法,该方法应用于第一方面及其各个实现方式的电控助力转向装置,该方法包括:当第一电机能够提供与方向盘的转动相对应的全部转向助力时,关闭第二电机;当第一电机失去与方向盘的转动相对应的部分或者全部转向助力时。启动第二电机。由此,当电动助力装置发生单点故障使得第一电机失去一路电源的驱动时,第一电机仍然可以提供50%的转向助力,这样,第二电机只需提供25%的转向助力,就能够使电动助力装置继续维持75%的转向助力输出,从而满足l4等级的冗余能力要求。
23.第三方面,本技术还提供了一种车辆,该车辆包括上述各方面提供的电动助力转向装置,并且可以用于执行上述各方面的方法。
24.第四方面,本技术还提供了一种计算机存储介质,计算机存储介质中存储有计算机指令,当其在计算机上运行时,使得计算机执行上述各方面的方法。
25.第五方面,本技术还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述各方面的方法。
26.第六方面,本技术还提供了一种芯片系统。该芯片系统包括处理器,用于支持上述装置或设备实现上述方面中所涉及的功能,例如,生成或处理上述方法中所涉及的信息。在一种可能的设计中,芯片系统还包括存储器,用于保存上述模块或设备必要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包含芯片和其他分立器件。
附图说明
27.图1是电动助力转向系统的结构示意图;
28.图2是转向机的结构示意图;
29.图3是一种电动助力转向系统的驱动逻辑示意图;
30.图4是另一种电动助力转向系统的驱动逻辑示意图;
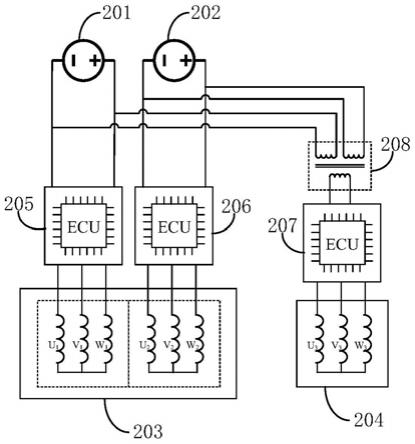
31.图5是本技术实施例提供的电动助力转向装置的驱动逻辑示意图;
32.图6是本技术实施例提供的隔离供电单元的结构示意图;
33.图7是本技术实施例提供的一种电动助力转向装置的结构示意图;
34.图8是本技术实施例提供的一种电动助力转向装置的控制流程;
35.图9是can信号的数据报文的格式示意图;
36.图10是第一控制单元检测第二控制单元是否正常的检测流程图;
37.图11是第二控制单元检测第一控制单元是否正常的检测流程图;
38.图12是第三控制单元检测第一控制单元是否正常的检测流程图;
39.图13是第三控制单元检测第二控制单元是否正常的检测流程图;
40.图14是电动助力转向装置未发生故障时的运行状态图;
41.图15是电动助力转向装置的tas信号或can信号故障时的运行状态图;
42.图16是电动助力转向装置的一种单点故障时的运行状态图;
43.图17是电动助力转向装置的另一种单点故障时的运行状态图;
44.图18是电动助力转向装置的一种双点故障时的运行状态图。
具体实施方式
45.在车辆结构中,由方向盘到车轮的动力传递系统称为转向系统,在车辆行驶时,转向系统用于保持或者改变汽车行驶方向。转向系统发展至今,共经历了四个阶段:机械式转向系统、液压助力转向系统、电控液压助力转向系统和电动助力转向系统。目前,除极少部分低端汽车产品以外,绝大多数汽车均采用了电动助力转向系统。图1是电动助力转向系统的结构示意图。如图1所示,电动助力转向系统由方向盘101、转向管柱102、中间轴103和转向机104组成。其中,转向机104是转向系统中最复杂的部分。如图2所示,转向机104主要由扭矩角度传感器(torque angle sensor,tas)105、电机106、电子控制单元(electronic control unit,ecu)107和电机转子位置传感器(motor position sensor,mps)108组成。当方向盘 101产生转动时,扭矩角度传感器tas 105检测方向盘101通过转向管柱102和中间轴103 传递的扭矩和旋转角度参数,并将检测到的参数反馈给电子控制单元ecu 107;电子控制单元ecu 107根据接收到的参数驱动电机106运行,以产生转向所需的助力。
46.在人工驾驶领域,电动助力转向系统通常采用非冗余设计,即仅包含一个电子控制单元 ecu和一个电机,并采用一路电源进行供电。当电动助力转向系统中的任何一个节点发生故障时,可以关闭系统,完全由人工提供转向力。然而,随着自动驾驶技术的发展,特别是高等级驾驶辅助系统adas的应用,非冗余设计的电动助力转向系统已经无法满足汽车行驶的安全性要求。
47.目前,美国国家公路交通安全管理局(nhtsa)将自动驾驶划分成为6个等级,这6个等级由低到高依次包括:
48.l0:无自动化配置,完全是驾驶员自己驾驶车辆,没有任何主动安全配置。
49.l1:驾驶辅助,车辆有一定的功能协助驾驶员执行横向或者纵向的车辆运动的特定任务 (但不是同时能完成并线超车这种复杂的任务),驾驶员承担大部分车辆控制能力。
50.l2:高级驾驶辅助,车辆能够有一定能力协助驾驶员执行包括横向纵向的车辆运动任务 (车辆能自主实现特定地复杂任务),但驾驶员需要实时监控车辆完成这些任务。
51.l3:特定场景下的自动驾驶,在车主同意下,自动驾驶系统能完全介入车辆行驶。当然,车主可以随时对车辆在自动驾驶行驶时出现的错误进行修正。
52.l4:高级自动驾驶,车辆行驶时全部操作都通过自动驾驶系统实现,在执行场景下车辆没有不合逻辑的表现(不会出错),完全不需要车主的操作介入。
53.l5:无论是否在特定的执行场景,车辆无需车主操作通过自动驾驶即可到达目的地。
54.其中,l2、l3和l4等级属于高等级驾驶辅助系统adas的范畴。
55.可以看出,从l3等级开始,驾驶操作都由自动驾驶系统完成,这就要求自动驾驶系统具有较高的安全性。在自动驾驶系统出现部分失效的情况下,l3等级要求自动驾驶系统仍然能够工作到车主介入或者车辆行驶到安全区域,l4等级则要求自动驾驶系统仍然能够工作到车辆行驶到安全区域。上述要求的满足,需要自动驾驶系统的执行器,例如电动助力转向系统具备冗余性,使电动助力转向系统在出现单点故障时,能够继续维持一定的转向助力,使车辆继续行驶到安全区域。通过对不同的路况进行分析,如果要满足l3等级的要求,电动助力转向系统的冗余能力需达到50%,即电动助力转向系统在出现单点故障时,能够继续维持50%的转向助力;如果要满足l4等级的要求,电动助力转向系统的冗余能力需达到75%,即电动助力转向系统在出现单点故障时,能够继续维持75%的转向助力。
56.图3是一种电动助力转向系统的驱动逻辑示意图。如图3所示,该电动助力转向系统包括一个6相电机和两个驱动电路。其中,每个驱动电路用于控制6相电机中的其中3相绕组,两个驱动电路共用一路电源进行供电。当其中一个驱动电路或者6相电机中的其中3相绕组发生单点故障时,该电动助力转向系统损失一半的转向助力,但可以利用未发生故障的驱动电路或者6相电机中未发生故障的3相绕组提供转向助力,因此最大能够提供50%的转向助力,无法满足l4等级的冗余能力要求。
57.图4是另一种电动助力转向系统的驱动逻辑示意图。如图4所示,该电动助力系统包括 3n(n为大于或者等于2的正整数)相电机、n个驱动电路和n路独立的电源。其中,每个驱动电路用于控制3n相电机中的其中3相绕组,每个驱动电路由单路的1路电源供电。当其中一个驱动电路、3n相电机中的其中3相绕组或者其中1路电源发生单点故障时,该电动助力转向系统损失1/n的转向助力,但可以利用未发生故障的n-1个驱动电路、3n相电机中未发生故障的3(n-1)相绕组或者未发生故障的n-1路电源提供转向助力,因此最大能够提供(n-1)/n的转向助力。由此可见,图4所示的电动助力转向系统如果满足l4等级的要求,需要12相电机、4个驱动电路和4路独立的电源,系统结构和控制逻辑复杂度高,可能发生故障的节点多,对整车独立电源的数目要求大,不利于实施。
58.本技术实施例提供了一种电动助力转向装置,能够满足l4等级的冗余能力要求,并且结构简单,易于实施。
59.图5是本技术实施例提供的电动助力转向装置的驱动逻辑示意图。如图5所示,该电动助力转向装置包括第一路电源201、第二路电源202、第一电机203和第二电机204。其中,第一电机203与第一路电源201和第二路电源202耦合,由第一路电源201和第二路电源202 供电。第一电机203能够在第一路电源201和/或第二路电源202的驱动下,提供与方向盘的转动相对应的转向助力。第一路电源201和第二路电源202中的每一路电源驱动第一电机203 产生转向助力的一部分。第一路电源201和第二路电源202耦合成一路电源之后,与第二电机204耦合,用于驱动第二电机204。第二电机204在第一电机203失去部分转向助力时,能够提供与方向盘的转动相对应的额外的转向助力,该额外的转向助力包括第一电机203失去的部分转向助力中的至少一部分。
60.进一步如图5所示,该电动助力转向装置还包括第一控制单元205、第二控制单元206 和第三控制单元207。其中,第一控制单元205、第二控制单元206和第三控制单元207例如均可以是独立的电子控制单元ecu。第一控制单元205与第一路电源201和第一电机203的
一部分绕组耦合,能够使用第一路电源201驱动第一电机203,以使第一电机203提供与方向盘的转动相对应的一部分转向助力。第二控制单元206与第二路电源202和第一电机203 的除去与第一控制单元205耦合以外的另一部分绕组耦合,能够使用第二路电源202驱动第一电机203,以使第一电机203提供与方向盘的转动相对应的另一部分转向助力。第三控制单元207通过隔离供电单元208与第一路电源201和第二路电源202耦合,隔离供电单元208 能够将第一路电源201和第二路电源202耦合成一路电源并输出给第三控制单元207,使得第三控制单元207能够使用隔离供电单元208耦合后的一路电源驱动第二电机204产生与方向盘的转动相对应的额外的转向助力。
61.具体实现中,第一电机203可以是6相电机,包括6相绕组,例如:u1、v1、w1、u2、 v2和w2。其中,第一控制单元205用于与第一电机203的6相绕组中的其中3相绕组耦合,例如:u1、v1和w1,将第一路电源201输出至这3相绕组,使第一电机203产生50%的转向助力。第一控制单元205用于与第一电机203的6相绕组中的另外3相绕组耦合,例如: u2、v2和w2,将第二路电源202输出至这3相绕组,使第一电机203产生另外50%的转向助力。由此可见,当第一控制单元205和第二控制单元206均未发生故障(例如第一控制单元205和第二控制单元206均能够正常的驱动第一电机203),并且第一路电源201和第二路电源202均未发生故障时,使用第一控制单元205和第二控制单元206同时驱动第一电机203,可以使第一电机203提供100%的转向助力。
62.具体实现中第二电机204可以是3相电机,包括3相绕组,例如:u3、v3和w3。第三控制单元207用于与第二电机204的3相绕组u3、v3和w3耦合,将第一路电源201和第二路电源202耦合后的一路电源输出至这3相绕组,使第二电机204产生额外的至少25%的转向助力。
63.本技术实施例中,第一路电源201和第二路电源202可以是供电能力相同的电源,例如额定电压相同,并且能够提供相同大小的额定电流。
64.图6是本技术实施例提供的隔离供电单元208的结构示意图。如图6所示,隔离供电单元208的一次侧(输入侧)包括第一绕组301和第二绕组302,二次侧(输出侧)包括第三绕组303。其中,第一绕组301通过隔离电路与第一路电源201耦合,第二绕组通过隔离电路与第二路电源202耦合,第三绕组303通过隔离电路耦合至第三控制单元207。由此,隔离供电单元208将一次侧输入的第一路电源201和第二路电源202耦合成二次侧输出的一路电源,接入到第三控制单元207。使得第三控制单元207可以利用耦合后的一路电源驱动第二电机204。
65.本技术实施例中,转向助力例如可以是电机的输出扭矩,单位是牛米(nm)。可以理解的是,不同重量不同种类的车辆对电动助力转向装置的电机输出扭矩的需求是不同的,以此可以作为选择第一电机203和第二电机204的依据。举例来说,某款5座小型乘用车要求电动助力转向装置最大能够提供8nm的转向助力(即100%的转向助力为8nm),那么,可以选择一个最大输出扭矩不小于8nm的电机作为第一电机203,以提供100%的转向助力;另外,可以选择一个最大输出扭矩不小于2nm的电机作为第二电机204,以提供额外不小于 25%的转向助力。可以理解的是,本技术实施例中的第一电机203为主用电机,第二电机204 为备用电机。
66.当电动助力转向装置未发生故障时,第一控制单元205和第二控制单元206驱动第一电机203的全部6相绕组,使得第一电机203能够提供100%的转向助力,此时,不需要启用
是一种功能丰富的车用总线标准,用于在不需要主机host的情况下,允许网络上的单片机和仪器相互通信。它基于消息传递协议,采用复用通信线缆,以降低铜线使用量,后来也被其他行业所使用。can创建在基于信息导向传输协定的广播机制(broadcast communication mechanism)上。其根据信息的内容,利用信息标志符(message identifier)来定义内容和消息的优先顺序进行传递,而并非指派特定站点地址(station address),每个标志符在整个网络中都是独一无二的。因此,can拥有良好的弹性调整能力,可以在现有网络中增加节点而不用在软、硬件上做出调整。除此之外,can消息的传递不基于特殊种类的节点,能够增加升级网络的便利性。
73.可选的,本技术实施例将控制器局域网can的通信信号分成三路can信号,为便于描述,这里将三路信号分别称作第一can信号、第二can信号和第三can信号。其中,第一控制单元205耦合至第一can信号和第三can信号,第二控制单元206耦合至第二can 信号和第三can信号,第三控制单元207耦合至第一can信号、第二can信号和第三can 信号。
74.可选的,本技术实施例中的第一can信号和第二can信号可以用于电动助力转向装置与车辆的其他设备通信,例如:第一控制单元205可以通过第一can信号与车辆的工控机通信,第二控制单元206可以通过第二can信号与车辆的工控机通信。本技术实施例中的第三 can信号可以用于电动助力转向装置的内部通信,例如:第一控制单元205和第二控制单元206可以通过第三can信号进行通信,第一控制单元205和第三控制单元207可以通过第三 can信号进行通信,第二控制单元206和第三控制单元207可以通过第三can信号进行通信。
75.根据图7所示的结构,本技术实施例提供了一种电动助力转向装置的控制流程,该控制流程如图8所示具体包括以下步骤:
76.步骤s101,采集数据。
77.具体实现中,需要采集的数据可以包括:第一tas信号、第一can信号、第二tas信号、第二can信号、第一mps信号、第二mps信号、第一路电源201的电压和电流和第二路电源202的电压和电流等数据。
78.其中,第一tas信号、第一can信号、第一mps信号以及第一路电源201的电压和电流可以由第一控制单元205获取,第二tas信号、第二can信号、第二mps信号以及第二路电源202的电压和电流可以由第二控制单元206获取。
79.另外,第一控制单元205和第二控制单元206内部均可以设置有电流传感器,该电流传感器用于检测输入至第一电机203绕组的电流,例如,设置于第一控制单元205内部的电流传感器可以检测输入至第一电机203的其中3相绕组(u1、v1、w1)的电流i1,设置于第二控制单元206内部的电流传感器可以检测输入至第一电机203的另外3相绕组(u2、v2、w2) 的电流i2。
80.步骤s102,判断第一tas信号、第一can信号、第二tas信号和/或第二can信号是否全部正常;如果全部正常,则执行步骤s103;如果第一tas信号、第一can信号、第二 tas信号和/或第二can信号中有至少一个是故障的,则执行步骤s106。
81.具体实现中,通过多路信号校验的方式可以判断各个tas信号是否正常,多路信号校验任务可以由第一控制单元205完成,也可以由第二控制单元206完成。另外,通过校验can 信号的数据报文中的循环冗余校验(cyclic redundancy check,crc)位和添加在数据域(data field)中的循环计数器(rolling counter),可以判断can信号是否正常。下面具
体展开说明:
82.在一种实现方式中,第一tas信号和第二tas信号进行校验可以由第一控制单元205 完成。其中,第二控制单元206可以通过can通信将其获取的第二tas信号发送给第一控制单元205;第一控制单元205采用预设的校验算法对第一tas信号和第二tas信号进行校验,例如:同步性校验、互相关校验、数值校验等;然后,第一控制单元205根据可以校验结果判断第一tas信号和第二tas信号是否均为正常信号。
83.示例地,当执行同步性校验时,如果第一tas信号和第二tas信号满足一定的同步性要求,则说明两个信号均是正常的,如果第一tas信号和第二tas信号不满足同步性要求,则说明两个信号中至少有一个是故障的。
84.示例地,当执行互相关性校验时,如果第一tas信号和第二tas信号满足一定的互相关要求,则说明两个信号均是正常的,如果第一tas信号和第二tas信号不满足互相关要求,则说明两个信号中至少有一个是故障的。
85.在一种实现方式中,第一tas信号和第二tas信号进行校验还可以由第二控制单元206 完成。其中,第一控制单元205可以通过can通信将其获取的第一tas信号发送给第二控制单元206;第二控制单元206采用预设的校验算法对第一tas信号和第二tas信号进行校验,并且校验结果判断第一tas信号和第二tas信号是否均为正常信号。具体的校验方法可以参照上述示例,此处不再赘述。
86.应当理解的是,上述对第一tas信号和第二tas信号进行校验方法,仅仅是本技术此处采用的部分实施例,而不是全部实施例,本领域技术人员还可以采用其他可行的校验算法第一tas信号和第二tas信号进行校验,以判断两个信号是否正常,这些都没有超出本技术实施例的保护范围。
87.在一种实现方式中,第一控制单元205可以通过校验第一can信号的数据报文中的crc 位,判断第一can信号是否正常。同理,第二控制单元206也可以通过校验第二can信号的数据报文中的crc位,判断第二can信号是否正常。
88.图9是can信号的数据报文的格式示意图。如图9所示,can报文包括长度为15字节的crc位,并且在can报文的数据域中还配置了循环计数器(rolling counter),该循环计数器(rolling counter)随着发送端发送数据报文进行累加的循环计数。在can通信中,报文发送端会在报文结尾处加上一个帧检查序列(frame check sequence,fcs)来确保消息的正确。报文接收端会根据接收到的报文(包括循环计数器的数值)重新演算fcs并与所接收到的fcs 比对。如果比对结果不相符,表示有crc错误,说明can信号出现故障;如果比对结果相符,则说明can信号正常。
89.步骤s103,判断第一mps信号、第二mps信号、第一路电源201、第二路电源202、第一控制单元205、第二控制单元206和第一电机203是否正常;如果全部正常,则返回步骤s101,如果第一mps信号、第二mps信号、第一路电源201、第二路电源202、第一控制单元205、第二控制单元206和第一电机203中有至少一个是故障的,则执行步骤s104。
90.具体实现中,通过多路信号校验的方式可以判断各mps信号是否正常,多路信号校验任务可以由第一控制单元205完成,也可以由第二控制单元206完成。另外,通过检测电源的供电电压可以判断第一路电源201和第二路电源202是否正常。另外,第一控制单元205和第二控制单元206可以通过芯片自检测的方式判断自身是否正常,或者通过can相互通信的
方式判断彼此是否正常。另外,通过检测第一电机203绕组的输入电流,并结合相应的mps 信号(即转子位置)还可以判断第一电机203是否正常。下面具体展开说明:
91.在一种实现方式中,第一mps信号和第二mps信号进行校验可以由第一控制单元205 完成。其中,第二控制单元206可以通过can通信将其获取的第二mps信号发送给第一控制单元205;第一控制单元205采用预设的校验算法对第一mps信号和第二mps信号进行校验,例如:同步性校验、互相关校验、数值校验等;然后,第一控制单元205根据可以校验结果判断第一mps信号和第二mps信号是否均为正常信号。
92.示例地,当执行同步性校验时,如果第一mps信号和第二mps信号满足一定的同步性要求,则说明两个信号均是正常的,如果第一mps信号和第二mps信号不满足同步性要求,则说明两个信号中至少有一个是故障的。
93.示例地,当执行互相关性校验时,如果第一mps信号和第二mps信号满足一定的互相关要求,则说明两个信号均是正常的,如果第一mps信号和第二mps信号不满足互相关要求,则说明两个信号中至少有一个是故障的。
94.应当理解的是,上述对第一mps信号和第二mps信号进行校验方法,仅仅是本技术此处采用的部分实施例,而不是全部实施例,本领域技术人员还可以采用其他可行的校验算法第一mps信号和第二mps信号进行校验,以判断两个信号是否正常,这些都没有超出本技术实施例的保护范围。
95.在一种实现方式中,第一控制单元205和第二控制单元206内均可以设置有电压传感器。其中,第一控制单元205可以通过电压传感器获取第一路电源201的供电电压v
cc1
,如果供电电压v
cc1
低于一个最小阈值v
min1
,或者大于一个最大阈值v
max1
,则说明第一路电源201 故障。同理,第二控制单元206可以通过电压传感器获取第二路电源202的供电电压v
cc2
,如果供电电压v
cc2
低于一个最小阈值v
min2
,或者大于一个最大阈值v
max2
,则说明第二路电源202故障。其中,第一路电源201和第二路电源202可以是额定输出电压相同的电源,也可以是不同的电源;当第一路电源201和第二路电源202是相同的电源时,v
min
=v
min1
= v
min2
,v
max
=v
max1
=v
max2
。示例地,当第一路电源201的额定输出电压为12v时,v
max
例如可以为13v,v
min
例如可以为11v,那么,当供电电压v
cc1
大于13v或者小于11v时,说明第一路电源201故障。
96.在一种实现方式中,第一控制单元205和第二控制单元206均可以通过芯片检测机制判断自身是否正常。当控制单元检测到自身发生故障或者故障时,能够产生相应的故障码 (diagnose trouble code,dtc),并通过can通信将故障码发送给其他的控制单元和车辆的工控机,使得其他控制单元和/或工控机采取相应的操作。示例地,如果第一控制单元205检测到自身发生故障,会将相应的故障码发送给第二控制单元206、第三控制单元207和工控机,由第二控制单元206、第三控制单元207和/或工控机执行应对操作。
97.在一种实现方式中,如图10所示,第一控制单元205可以通过第三can信号与第二控制单元206进行通信,以判断第二控制单元206是否正常。例如,第一控制单元205可以通过第三can信号向第二控制单元206发送请求应答的指令,并检测是否收到了第二控制单元 206的应答;如果收到了第二控制单元206的应答,则说明第二控制单元206正常,如果没有收到第二控制单元206的应答,则说明第二控制单元206发生故障。当检测到第二控制单元206发生故障时,第一控制单元205可以将故障信息发送给第三控制单元207和工控机,使得第三控制单元207和/或控机采取相应的操作。
98.在一种实现方式中,如图11所示,第二控制单元206可以通过第三can信号与第一控制单元205进行通信,以判断第一控制单元205是否正常。例如,第二控制单元206可以通过第三can信号向第一控制单元205发送请求应答的指令,并检测是否收到了第一控制单元 205的应答;如果收到了第一控制单元205的应答,则说明第一控制单元205正常,如果没有收到第一控制单元205的应答,则说明第一控制单元205发生故障。当检测到第一控制单元205发生故障时,第二控制单元206可以将故障信息发送给第三控制单元207和工控机,使得第三控制单元207和/或控机采取相应的操作。
99.在一种实现方式中,如图12所示,第三控制单元207可以通过第三can信号与第一控制单元205进行通信,以判断第一控制单元205是否正常。例如,第三控制单元207可以通过第三can信号向第一控制单元205发送请求应答的指令,并检测是否收到了第一控制单元 205的应答;如果收到了第一控制单元205的应答,则说明第一控制单元205正常,如果没有收到第一控制单元205的应答,则说明第一控制单元205发生故障。当检测到第一控制单元205发生故障时,第三控制单元207可以将故障信息发送给第二控制单元206和工控机,使得第二控制单元206和/或控机采取相应的操作。
100.在一种实现方式中,如图13所示,第三控制单元207可以通过第三can信号与第二控制单元206进行通信,以判断第二控制单元206是否正常。例如,第三控制单元207可以通过第三can信号向第二控制单元206发送请求应答的指令,并检测是否收到了第二控制单元 206的应答;如果收到了第二控制单元206的应答,则说明第二控制单元206正常,如果没有收到第二控制单元206的应答,则说明第二控制单元206发生故障。当检测到第二控制单元206发生故障时,第三控制单元207可以将故障信息发送给第一控制单元205和工控机,使得第二控制单元206和/或控机采取相应的操作。
101.在一种实现方式中,第一控制单元205内设置有电流传感器,可用于检测第一电机203 的其中3相绕组(u1、v1、w1)的输入电流i1。第一控制单元205可以根据输入电流i1和/ 或第一mps信号判断第一电机203是否正常。例如,当输入电流i1持续高于额定电流i0时 (例如输入电流i1持续几秒钟高于额定电流i0,明显不是启动的瞬时电流时),可以认为第一电机203的3相绕组(u1、v1、w1)出现了过载或者短路。又例如,当第一控制单元205驱动第一电机203转动,但是输入电流i1却明显额定电流i0时(例如输入电流i0等于0a或者接近0a时),可以认为第一电机203的3相绕组(u1、v1、w1)出现了开路。又例如,当输入电流i1正常,但是第一mps信号却指示第一电机203的转子没有发生旋转时,说明第一电机203的转子出现故障。
102.在一种实现方式中,第二控制单元206内设置有电流传感器,可用于检测第一电机203 的另外3相绕组(u2、v2、w2)的输入电流i2。第二控制单元206可以根据输入电流i2和/ 或第二mps信号判断第一电机203是否正常。例如,当输入电流i2持续高于额定电流i0时,可以认为第一电机203的3相绕组(u2、v2、w2)出现了过载或者短路。又例如,当第二控制单元206驱动第一电机203转动,但是输入电流i2却明显额定电流i0时,可以认为第一电机203的3相绕组(u2、v2、w2)出现了开路。又例如,当输入电流i2正常,但是第二mps 信号却指示第一电机203的转子没有发生旋转时,说明第一电机203的转子出现故障。
103.步骤s104,启动第二电机204,然后执行步骤s105。
104.具体实现中,第三控制元可以用于启动第二电机204。
105.步骤s105,判断第一控制单元205、第二控制单元206和第一电机203是否发生了双
点故障;如果发生了双点故障,则执行步骤s107;如果没有发生双点故障,则执行步骤s106。
106.步骤s106,降低车辆的自动驾驶等级。
107.步骤s107,控制车辆停车。
108.本技术实施例中,双点故障指的是助力转向装置的第一控制单元205、第二控制单元206、第一电机203的其中3相绕组(u1、v1、w1)和另外3相绕组(u2、v2、w2)中至少有两点发生了故障,并且导致第一电机203失去了全部的转向助力,双点故障是电动助力转向装置故障的最严重的情况。
109.当电动助力转向装置发生单点故障时,第一电机203剩余50%的转向助力,如果开启第二电机204,电动助力转向装置依然能提供75%的转向助力,能够满足l4自动驾驶的最低需求。当电动助力转向装置发生双点故障时,即使开启第二电机204,电动助力转向装置也只能提供25%的转向助力,达不到l3或者l4自动驾驶的最低需求。
110.可选的,当电动助力转向装置发生单点故障时,第三控制单元207、或者第一控制单元 205和第二控制单元206中尚能够正常运行的控制单元可以通过can通信向车辆的工控机发送第一指示信号,第一指示信号用于向工控机指示电动助力转向装置未发生双点故障的信息。工控机在接收到第一指示信号时,可以限制车辆的部分自动驾驶功能,以提高车辆行驶的安全性,例如:从l4自动驾驶降级到l3自动驾驶,或者取消高速自动驾驶功能等。
111.可选的,当电动助力转向装置发生双点故障时,第三控制单元207、或者第一控制单元 205和第二控制单元206中尚能够正常运行的控制单元可以通过can通信向车辆的工控机发送第二指示信号,第二指示信号用于向工控机指示电动助力转向装置发生双点故障的信息。工控机在接收到第二指示信号时,可以控制车辆停车,以避免发生安全事故。
112.下面结合图14-图17,列举出本技术实施例提供的电动助力转向装置的一部分可能的工作模式,以具体说明该电动助力转向装置是如何在发生单点故障时继续提供至少75%的转向助力的。在图14-图17中,正常运行的部件以实线示出,发生故障的部件以虚线示出,并且,使能状态的电机以阴影示出,停转或者备用状态的电机以空白示出。
113.图14是电动助力转向装置未发生故障时的运行状态图。如图14所示,当电动助力转向装置在未发生故障时,第一控制单元205和第二控制单元206处于正常运行状态,共同驱动第一电机203,使第一电机203提供100%的转向助力,满足l4自动驾驶的需求。在这种状态下,第三控制单元207处于待机状态,不会驱动第二电机204,第二电机204不工作,处于备用状态。可以理解的是,由于电动助力转向装置未发生任何故障,控制流程始终在步骤 s101-步骤s102-步骤s103之间循环,直到发生故障。
114.图15是电动助力转向装置的tas信号或can信号故障时的运行状态图。
115.示例地,如图15所示,当第一tas信号故障时,第二控制单元206可以通过第三can 信号将第二tas信号发送给第一控制单元205,使得第一控制单元205根据第二tas信号对第一电机203进行伺服控制。同理,当第二tas信号故障时,第一控制单元205可以通过第三can信号将第一tas信号发送给第二控制单元206,使得第二控制单元206根据第一tas 信号对第一电机203进行伺服控制。由此可见,tas信号故障不影响第一电机203提供100%的转向助力,电动助力转向装置仍然可以满足l4自动驾驶的需求。
116.示例地,如图15所示,当第一can信号故障时,第二控制单元206可以通过第三can 信号将第二can信号发送给第一控制单元205,使得第一控制单元205根据第二can信号对第
一电机203进行伺服控制。同理,当第二can信号故障时,第一控制单元205可以通过第三can信号将第一can信号发送给第二控制单元206,使得第二控制单元206根据第一 can信号对第一电机203进行伺服控制。由此可见,can信号故障不影响第一电机203提供100%的转向助力,电动助力转向装置仍然可以满足l4自动驾驶的需求。
117.可以理解的是,当tas信号或can信号故障时,电动助力转向装置还可以执行步骤s106,限制车辆的部分自动驾驶功能,例如:从l4自动驾驶降级到l3自动驾驶,或者取消高速自动驾驶功能等,以提高车辆行驶的安全性。
118.本技术实施例中,电动助力转向装置的单点故障可以概括成三种情形:
119.第一种情形,第一电机203的3相绕组(u1、v1、w1)和/或第一控制单元205故障,并且,第一电机203的3相绕组(u2、v2、w2)和第二控制单元206正常,在这种情形下,第二电机204的3相绕组(u2、v2、w2)提供50%的转向助力。
120.第二种情形,第一电机203的3相绕组(u1、v1、w1)和第一控制单元205正常,并且,第一电机203的3相绕组(u2、v2、w2)和/或第二控制单元206故障,在这种情形下,第一电机203的3相绕组(u1、v1、w1)提供50%的转向助力。
121.第三种情形,第一路电源201和第二路电源202中的任意一路出现故障。
122.图16是电动助力转向装置的一种单点故障时的运行状态图。当第一mps信号、第二mps 信号、第一控制单元205、第二控制单元206和第一电机203中的至少一个故障,并且导致第一电机203失去50%的转向助力时,可以认为电动助力转向装置发生了单点故障。例如在图16中,如果第一电机203的3相绕组(u1、v1、w1)发生故障,而装置的其余部分均正常,那么第一电机203会失去50%的转向助力,属于单点故障。又例如,如果第一控制单元 205发生故障,而装置的其余部分均正常,那么第一电机203由于3相绕组(u1、v1、w1) 失去了第一控制单元205的驱动,也会失去50%的转向助力,也属于单点故障。又例如,如果第一控制单元205、第一mps信号和第一电机203的3相绕组(u1、v1、w1)均发生故障或故障,而装置的其余部分均正常,那么第一电机203会失去50%的转向助力,同样属于单点故障。
123.图17是电动助力转向装置的另一种单点故障时的运行状态图。当第一路电源201和第二路电源202中的任意一路出现故障时,会导致第一电机203失去50%的转向助力,因此可以认为电动助力转向装置发生了单点故障。例如在图17中,如果第一路电源201出现故障而无法提供足够的供电电压,那么第一控制单元205就无法正常运行,第一电机203的3相绕组 (u1、v1、w1)也无法被驱动,那么第一电机203会失去50%的转向助力,属于单点故障。
124.根据图16和图17,当电动助力转向装置发生单点故障时,第三控制单元207启动第二电机204,提供至少25%的转向助力,使电动助力转向装置能够提供75%的转向助力,满足 l4自动驾驶的需求。另外,电动助力转向装置还可以执行图8中的步骤s106,限制车辆的部分自动驾驶功能,例如:从l4自动驾驶降级到l3自动驾驶,或者取消高速自动驾驶功能等,以提高车辆行驶的安全性。
125.图18是电动助力转向装置的一种双点故障时的运行状态图。当第一电机203的3相绕组 (u1、v1、w1)和/或第一控制单元205故障,并且,第一电机203的3相绕组(u2、v2、 w2)和/或第二控制单元206故障时,第一电机203停转而无法提供转向助力,因此可以认为电动助力转向装置发生了双点故障。例如在图18中,第一电机203的3相绕组(u1、v1、 w1)发生故障而无法被第一控制单元205驱动,第二控制单元206发生故障而无法驱动第一电机203的3相
绕组(u2、v2、w2),导致第一电机停转,属于双点故障,电动助力转向装置仅剩余第二电机提供的25%的转向助力。此时,电动助力转向装置会执行图8中的步骤 s107,即车辆的工控机控制车辆停车,以避免发生安全事故。
126.本技术还提供一种计算机存储介质,计算机存储介质中存储有计算机指令,当其在计算机上运行时,使得计算机执行上述各方面的方法。
127.本技术还提供一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述各方面的方法。
128.本技术还提供一种车辆,该车辆可以包括上述各方面提供的电动助力转向装置,并且可以用于执行上述各方面的方法。其中,该车辆包括但不限于燃油机动车、油电混动机动车、纯电机动车、具备行驶能力的工程机械、自动导引车agv、具备行驶能力的机器人等。
129.本技术还提供了一种芯片系统。该芯片系统包括处理器,用于支持上述装置或设备实现上述方面中所涉及的功能,例如,生成或处理上述方法中所涉及的信息。在一种可能的设计中,芯片系统还包括存储器,用于保存上述模块或设备必要的程序指令和数据。该芯片系统,可以由芯片构成,也可以包含芯片和其他分立器件。
130.以上内容,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何在本技术揭露的技术范围内的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1