车辆用转向系统的制作方法
1.本发明涉及搭载于车辆的车辆用转向系统。
背景技术:
2.作为具备能够使左右车轮分别独立地转向的1对车轮转向装置的车辆用转向系统(以下,存在称为“左右独立转向系统”的情况),例如存在日本特开2009
‑
101858中记载那样的技术。在该技术中,根据作用于各车轮的横向力和各车轮的车轮旋转速度(以下,存在简称为“车轮速”的情况)来使车辆的转弯举动的稳定性提高。
技术实现要素:
3.左右独立转向系统尚处于开发阶段,特别是关于左右车轮的转向控制,留有大量的改进余地。因此,通过实施改进,能够使左右独立转向系统的实用性提高。本发明提供实用性高的左右独立转向系统。
4.本发明的第1方式是车辆用转向系统。上述车辆用转向系统包括:第1车轮转向装置,构成为使车辆所具有的左车轮转向;第2车轮转向装置,构成为使车辆所具有的右车轮转向;以及控制器。上述控制器构成为根据对上述车辆的转向请求来决定目标转向位置,该目标转向位置是以在上述左右车轮分别实现来作为目标的转向位置,上述控制器构成为控制上述第1车轮转向装置和上述第2车轮转向装置以使上述左右车轮各自的转向位置成为上述目标转向位置,并构成为执行对上述左右车轮中的一方的转向位置进行变更的转向位置变更处理,以使在以转弯的剧烈度为指标的转弯指标超过设定阈值的情况下与未超过上述设定阈值的情况相比上述车辆的转弯特性更成为不足转向趋势。
5.根据本发明的作为上述第1方式的上述车辆用转向系统(以下,存在简称为“转向系统”的情况),由于在进行剧烈的转弯的情况下执行上述转向位置变更处理,所以上述车辆的转弯中的稳定性提高。
6.上述第1方式中的“剧烈的转弯”例如是指在转弯时作用于车身的离心力大的转弯、即以很高的车辆行驶速度进行的很小的转弯半径的转弯。因此,以转弯的剧烈度为指标的“转弯指标”例如能够采用车身所产生的横向加速度、车辆的横摆率等。另外,在剧烈的转弯中,由于左右车轮分担的车身的载荷、即左右车轮的分担车身载荷产生比较大的差,所以也能够采用这些分担车身载荷之差(以下,存在称为“分担载荷差”的情况)作为转弯指标。进一步来说,分担车身载荷越大,则用于使车轮转向的力亦即转向力越大、详细而言,为了将车轮的转向位置维持为目标转向位置所需的转向力亦即转向保持力越大。鉴于此,还能够采用转弯时对左右车轮附加的转向力之差(以下,存在称为“转向力差”的情况)作为转弯指标。
7.在上述第1方式中,上述左右车轮中的上述一方可以是转弯外轮。
8.在上述第1方式中,上述车辆具有前后左右4个车轮,上述左右车轮可以是左右的前轮,上述控制器可以构成为在上述转向位置变更处理中减小上述左右的前轮的一方的转
向位置。
9.在上述第1方式中,上述车辆具有前后左右4个车轮,上述左右车轮可以是左右的后轮,上述控制器可以构成为在上述转向位置变更处理中增大上述左右的后轮的一方的转向位置。
10.在上述第1方式中,控制器可以构成为通过控制上述第1车轮转向装置与上述第2车轮转向装置所产生的转向力来将上述左右车轮各自的转向位置控制成为目标转向位置。
11.在上述第1方式中,上述第1车轮转向装置可以具有作为驱动源的第1电动马达、和构成为将上述第1电动马达的动作转换为车轮的转向动作的第1动作转换机构,上述第2车轮转向装置可以具有作为驱动源的第2电动马达、和构成为将上述第2电动马达的动作转换为车轮的转向动作的第2动作转换机构,上述控制器可以构成为通过控制向上述第1电动马达与上述第2电动马达的供给电流来控制上述第1车轮转向装置与上述第2车轮转向装置所产生的转向力。在这样的转向系统中,能够代替上述转向力差而采用上述第1车轮转向装置的上述第1电动马达与上述第2车轮转向装置的上述第2电动马达所发挥的力(以下,存在称为“马达力”的情况)之差、向上述第1车轮转向装置的电动马达与上述第2车轮转向装置的电动马达供给的供给电流之差作为转弯指标。例如,在采用马达力之差、供给电流之差作为转弯指标的情况下,与采用横向加速度、横摆率作为转弯指标的情况不同,不需要横向加速度传感器、横摆率传感器等特别的传感器。
12.在上述第1方式中,上述控制器可以构成为在上述转向位置变更处理中对使上述左右车轮中的一方转向的上述第1车轮转向装置或者上述第2车轮转向装置的转向力进行变更,以便变更上述左右车轮中的上述一方的转向位置。
13.其中,本发明的上述第1方式的转向系统中的“车轮的转向位置”简单而言是车轮的转向角,可认为是从车辆直行的状态起的转向位置的变化量。因此,转向位置大、转向位置小与转向角大、转向角小同义,能够认为是从车辆直行的状态的转向位置亦即直行状态位置起的转向位置的偏离程度的大小。“目标转向位置”是根据转向请求而决定的,例如可以根据方向盘等转向操作部件的操作量来决定。另外,在本车辆被自动驾驶(自动转向操纵)的情况下,可以根据来自自动驾驶系统的指令来决定。
14.可认为根据上述分担载荷差、上述转向力差来决定不足转向控制的执行的方式是犹如利用横向力顺应转向(lateral force compliance steering)来实现车辆转弯的稳定那样的方式。考虑到这一点,优选在不足转向控制中被变更转向位置的车轮(以下,存在称为“变更轮”的情况)是左右车轮中的分担车身载荷较大的转弯外轮、即距车辆转弯中心较远的车轮。
15.当在具有前后左右4个车轮的车辆中与左右的前轮对应地设置有1对车轮转向装置的情况下,只要以变更轮的转向位置变小的方式执行不足转向控制即可,在与左右的后轮对应地设置有1对车轮转向装置的情况下,只要以变更轮的转向位置变大的方式执行不足转向控制即可。在具有前后左右4个车轮的车辆中,也可以与左右的前轮、左右的后轮对应地设置4个车轮转向装置,该情况下,可以以前轮侧的变更轮的转向位置变小且后轮侧的变更轮的转向位置变大的方式执行不足转向控制。
16.根据与转向力差相关的上述说明能够理解执行不足转向控制时的转弯外轮的认定。例如,在上述第1方式中,上述控制器可以构成为将上述第1车轮转向装置与上述第2车
轮转向装置所产生的转向力进行比较,并将上述第1车轮转向装置与第2车轮转向装置中的产生较大的转向力的一方所转向的车轮认定为转弯外轮。也可以根据转向操作部件的操作方向来认定转弯外轮,但例如在上述车辆被自动驾驶的情况下,由于存在不进行转向操作部件的操作的时候,所以基于上述转向力的比较的认定是有效的。
17.在上述第1方式中,上述转弯指标可以是上述第1车轮转向装置与上述第2车轮转向装置所产生的转向力之差。
18.在上述第1方式中,上述控制器可以构成为能够变更上述设定阈值。
19.在上述第1方式中,上述控制器可以构成为在上述转向位置变更处理中能够变更上述左右车轮中的一方的转向位置的变更量。
20.关于在不足转向控制的执行的判断中使用的转弯指标的设定阈值可以被设定为固定,也可以被设定为能够变更。例如,在车辆的行驶模式是重视转弯的稳定那样的模式的情况下,为了容易执行不足转向控制,可以减小设定阈值,在车辆的行驶模式是重视车辆的举动的响应性(敏捷性)那样的模式的情况下,为了难以执行不足转向控制,可以增大设定阈值。
21.可以通过变更目标转向位置来进行不足转向控制中的变更轮的转向位置的变更,但也可以通过限制或助长上述第1车轮转向装置与第2车轮转向装置的一方所产生的转向力来进行。进一步来说,在车轮转向装置如上述那样具有电动马达作为驱动源的情况下,可以通过使向该电动马达的供给电流减少或增加来进行。
22.另外,不足转向控制中的变更轮的转向位置的变更量、即不进行不足转向控制的情况与进行不足转向控制的情况的转向位置的差量可以设定为固定,也可以设定为依据某些参数而变化。通过使变更量变化,能够以驾驶员在转向操作中的手感的适当化为目的来进行先前说明的横向力顺应转向的作用中的顺应性的调整,另外,能够以车辆的转弯稳定性的程度的适当化为目的来进行变更轮的转向位置的调整。具体而言,例如在根据车辆的前后加速度能够假设为例如由驾驶员进行了比较大的制动操作时、或能够假设为进行了比较大的加速操作时,可以减小变更量。
附图说明
23.以下,参照附图对本发明的示例性实施例的特征、优点、技术及工业重要性进行说明,在附图中相同的附图标记表示相同的构成要素,其中:
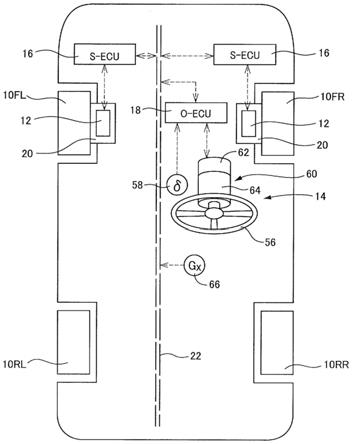
24.图1是表示第1实施例的车辆用转向系统的整体结构的示意图。
25.图2是表示组装有构成第1实施例的车辆用转向系统的车轮转向装置的车轮配设模块的立体图。
26.图3是在转弯外轮与转弯内轮中对作为用于使车轮转向的转向力而由转向马达产生的转向转矩进行比较的图表。
27.图4是在第1实施例的车辆用转向系统中执行的转向综合控制程序(steering integrated control program)的流程图。
28.图5是在第1实施例的车辆用转向系统中执行的车轮转向程序的流程图。
29.图6是构成转向综合控制程序的一部分的转向位置变更处理子例程的流程图。
30.图7是表示第2实施例的车辆用转向系统的整体结构的示意图。
31.图8是在第2实施例的车辆用转向系统中执行的转向综合控制程序的流程图。
32.图9是在第2实施例的车辆用转向系统中执行的车轮转向程序的流程图。
具体实施方式
33.以下,作为用于实施本发明的方式,参照附图对作为本发明的实施例的车辆用转向系统及其变形例详细进行说明。此外,本发明除了能够以下述实施例来实施之外,还能够通过以上述发明内容一栏所记载的方式为基础并根据本领域技术人员的知识实施各种变更、改进后的各种方式来实施。
34.[a]车辆用转向系统的结构
[0035]
第1实施例的车辆用转向系统(以下,存在简称为“转向系统”的情况)是所谓的线控转向式转向系统,如图1示意性所示,构成为包括:1对车轮转向装置12,搭载于具有左右的前轮10fl、10fr以及左右的后轮10rl、10rr的车辆,分别使左右的前轮10fl、10fr转向;操作装置14,用于受理驾驶员的操作;1对转向电子控制单元(以下,存在简称为“转向ecu”的情况)16,用于分别控制1对车轮转向装置12;以及操作电子控制单元(以下,存在简称为“操作ecu”的情况)18,控制操作装置14并且用于综合转向ecu16。此外,在不需要区别左右的前轮10fl、10fr的情况下,将它们统称为前轮10f,在不需要区别左右的后轮10rl、10rr的情况下,将它们统称为后轮10r,在不需要区别前轮10f、后轮10r的情况下,简单地统称为车轮10。
[0036]
各车轮转向装置12被组装于稍后将详细说明的车轮配设模块20内。1对转向ecu16以及操作ecu18分别与can(car area network or controllable area network)22连接,能够经由can22相互通信。在上述转向系统中,可认为由上述1对转向ecu16、操作ecu18、can22构成了控制1对车轮转向装置12的每一个的控制器。
[0037]
如图2所示,车轮配设模块(以下,存在简称为“模块”的情况)20是用于将安装了轮胎10a的轮子10b配设于车身的模块。能够将轮子10b本身认作车轮,但在本实施例中,为了方便起见,将安装了轮胎10a的轮子10b称为车轮10。
[0038]
本模块20具有作为车轮旋转驱动装置的车轮驱动单元24。车轮驱动单元24具有外壳24a、内置于外壳24a的作为驱动源的电动马达以及对该电动马达的旋转进行减速的减速器(均省略图示)、以及供轮子10b安装的轴毂(在图2中隐藏而看不到)。车轮驱动单元24配置于轮子10b的轮辋的内侧,被称为所谓的轮内马达单元。由于车轮驱动单元24是公知的构造,因而省略关于其构造的说明。
[0039]
本模块20构成为包括麦弗逊式悬架装置(亦称为“麦弗逊撑杆式”)。在该悬架装置中,车轮驱动单元24的外壳24a作为将车轮保持为能够旋转的托架发挥功能,进一步说,外壳24a作为稍后说明的车轮转向装置12中的转向节发挥功能,允许相对于车身的上下活动。因此,悬架装置构成为包括作为悬架臂的下臂26、车轮驱动单元24的外壳24a、减震器28以及悬架弹簧30。
[0040]
由于悬架装置本身是一般的构造,所以若简单而言明,则下臂26(lower arm)是所谓的被称为l臂的形状的结构,基端部在车辆前后方向上分成2个部分,在该基端部,借助第1衬套32、第2衬套34以能够绕臂转动轴线ll转动的方式被支承于车身的纵梁(side member,省略图示)。车轮驱动单元24的外壳24a在其下部借助作为第1接头的臂连结用球窝
接头(ball joint)36(以下,存在称为“第1接头36”的情况)以能够转动的方式连结于下臂26的前端部。
[0041]
减震器(shock absorber)28的下端部被固定支承于车轮驱动单元24的外壳24a,上端部借助上支承件(upper support)38被支承于车身的轮胎外罩的上部。悬架弹簧30的上端部也借助上支承件38被支承于车身的轮胎外罩的上部,悬架弹簧30的下端部被以凸缘状设置于减震器28的下支承件28a支承。即,悬架弹簧30与减震器28相互并列配设于下臂26与车身之间。
[0042]
本模块20具有制动装置,该制动装置构成为包括:盘式转子30,与轮子10b一同被安装于轴毂并且与车轮10一同旋转;和制动钳42,以跨过该盘式转子30的方式被保持于车轮驱动单元24的外壳24a。虽省略详细的说明,但该制动钳42具有:作为摩擦部件的制动块;以及制动促动器,具有电动马达,用于通过利用该电动马达的力将制动块按压于盘式转子30来停止车轮10的旋转,上述制动装置是依赖所谓的电动马达所产生的力来产生制动力的电动制动装置。
[0043]
并且,本模块20具有构成本实施例的转向系统的上述车轮转向装置12。车轮转向装置12是用于仅使左右1对车轮10中的一方与另一方独立地进行转向的单轮独立转向装置,构成为大致包括:如先前说明那样作为转向节发挥功能的车轮驱动单元24的外壳24a(以下,在作为车轮转向装置12的构成要素进行操作的情况下,存在称为“转向节24a”的情况);转向促动器46,在靠近下臂26的基端部的位置被配设于下臂26;以及转向横拉杆48,将该转向促动器46与转向节24a连结。
[0044]
转向促动器46构成为包括:转向马达46a,是作为驱动源的电动马达;减速器46b,对转向马达46a的旋转进行减速;以及促动器臂46c,通过经由减速器46b的转向马达46a的旋转而转动来作为转向摇臂(pitman arm)发挥功能。转向横拉杆48的基端部经由作为第2接头的杆基端部连结用球窝接头50(以下,存在称为“第2接头50”的情况)与促动器臂46c连结,转向横拉杆48的前端部经由作为第3接头的杆前端部球窝接头52(以下,存在称为“第3接头52”的情况)与转向节24a所具有的转向节臂24b连结。
[0045]
在本车轮转向装置12中,将上述上支承件38的中心与第1接头36的中心连结的线成为主销轴线(kingpin axis)kp。通过使转向马达46a动作,从而如图2中粗箭头所示,转向促动器46所具有的促动器臂46c绕促动器轴线al进行转动。该转动被转向横拉杆48传递,而使转向节24a绕主销轴线kp转动。即,如图2中用粗箭头所示,使车轮10转向。根据这样的构造,在本车轮转向装置12中具备动作转换机构54,该动作转换机构54包括促动器臂46c、转向横拉杆48、转向节臂24b等,将转向马达46a的旋转动作转换为车轮10的转向动作。
[0046]
车轮转向装置12的转向促动器46被配设于下臂26。因此,能够简便地进行模块20向车身的组装作业。简明而言,通过将下臂26的基端部安装于车身的纵梁、并将上支承件38安装于车身的轮胎外罩的上部,就能够将包括悬架装置、制动装置、车轮转向装置的上述模块20搭载于车辆。即,本模块20是相对于车辆的搭载性优良的模块。
[0047]
操作装置14具有线控转向式的转向系统中的一般的构造,简单而言,如图1所示,构成为包括:作为转向操作部件的方向盘56,被驾驶员转向操纵操作;转向传感器58,检测该方向盘56的旋转角亦即操作角作为转向操作部件的操作位置;以及反作用力赋予装置60,对方向盘56赋予操作反作用力。反作用力赋予装置60构成为包括:反作用力马达62,是
作为力源的电动马达;和减速器64,用于将反作用力马达62的力传递至方向盘56。
[0048]
[b]车辆用转向系统的控制
[0049]
i)基本转向控制
[0050]
简单而言,上述转向系统中的基本的转向控制是使2个前轮10f分别转向至与转向请求对应的转向位置ψ的控制。转向位置ψ与所谓的转向角同义,能够将在车辆的直行状态下应该所处的位置亦即直行状态位置作为基准转向位置而认为从该基准转向位置的相位位移量、即转向量。
[0051]
若对基本转向控制详细进行说明,则起到作为综合的控制机构的作用的电子控制单元亦即操作ecu18取得基于转向传感器58的检测的方向盘56的操作角、即转向操作位置δ(以下,存在简称为“操作位置δ”的情况)作为转向操作的程度,并根据该操作位置δ,按照所设定的转向传动比来决定在各车轮10中应该实现的转向位置ψ亦即目标转向位置ψ*。对于操作位置δ而言,能够将用于使车辆直行的位置亦即直行状态位置作为基准操作位置而认为从该基准操作位置的位置变化量、即转向操作量。另外,在上述车辆正处于自动驾驶中的情况下,可采用从省略图示的自动驾驶系统经由can22输送来的指令所包含的目标转向位置ψ*,来代替根据操作位置δ而决定的目标转向位置ψ*。此外,严格来说,转向操作位置δ、转向位置ψ是在夹着基准操作位置、基准转向位置的左右正负相反的值。
[0052]
车轮转向装置12不具有用于直接检测车轮10的转向位置ψ的转向位置传感器。因此,在本转向系统中,利用车轮10的转向位置ψ与转向马达46a的动作位置之间存在特定的关系,操作ecu18以及1对转向ecu16根据转向马达46a的动作位置来控制转向促动器46所产生的转向力。由于转向促动器46所产生的转向力与转向马达46a所产生的转矩亦即转向转矩tq等效,所以具体而言,操作ecu18根据转向马达46a的动作位置来决定转向马达46a应该产生的转向转矩tq亦即目标转向转矩tq*。
[0053]
由于转向马达46a是旋转式马达,所以转向马达46a的动作位置是马达轴的角度位置、即马达旋转角θ。马达的动作位置可认作马达的动作量,详细而言,是从车辆直行时的马达的动作位置亦即基准动作位置起的变化量,马达旋转角θ可认作从车辆直行时的基准动作位置亦即基准马达旋转角起的位移角。马达旋转角θ累积超过360
°
。进一步来说,在本车轮转向装置12中,转向马达46a与转向节24a机械连结,转向马达46a的马达旋转角θ的变化量与车轮的转向位置ψ的变化量之间存在特定的关系。粗略来说,可认为在它们之间基于一定的比的关系成立,该一定的比依据减速器46b的减速比等。并不利用该关系直接控制转向位置ψ,而通过马达旋转角θ的控制来控制车轮10的转向位置ψ。此外,严格来说,马达旋转角θ也是在夹着基准马达旋转角的左右正负相反的值。
[0054]
若对目标转向转矩tq*的决定具体进行说明,则操作ecu18针对各车轮10根据上述目标转向位置ψ*来决定马达旋转角θ的目标亦即作为目标动作位置的目标马达旋转角θ*。另一方面,转向马达46a是无刷dc马达,为了切换向自身的电流供给中的相而具有马达旋转角传感器(例如霍尔ic、解析器等)。各转向ecu16根据该马达旋转角传感器的检测来掌握以基准马达旋转角为基准的当前时刻的马达旋转角θ亦即实际马达旋转角θ,将该实际马达旋转角θ的信息经由can22发送至操作ecu18。操作ecu18针对每个车轮10求出马达旋转角θ相对于目标马达旋转角θ*的偏差亦即马达旋转角偏差δθ作为动作位置偏差,并根据该马达旋转角偏差δθ(=θ*
‑
θ),按照下式来决定目标转向转矩tq*。
[0055]
tq*=g
p
·
δθ+g
d
·
(dδθ/dt)+g
i
·
∫δθdt
[0056]
其中,上述公式是基于马达旋转角偏差δθ的遵照反馈控制规则的公式,第1项、第2项、第3项分别是比例项、微分项、积分项,g
p
、g
d
、g
i
分别是比例增益、微分增益、积分增益。
[0057]
操作ecu18将关于目标转向转矩tq*的信息经由can22发送至各车轮10的转向ecu16,各转向ecu16根据该目标转向转矩tq*来控制转向马达46a。转向转矩tq与向转向马达46a的供给电流i处于特定的关系。详细而言,由于转向转矩tq依赖于转向马达46a所发挥的力,所以转向转矩tq与供给电流i大体成比例关系。据此,各转向ecu16基于在操作ecu18中决定的目标转向转矩tq*来决定向转向马达46a的供给电流i的目标亦即目标供给电流i*,并将该目标供给电流i*供给至转向马达46a。具体而言,各转向ecu16具有执行目标供给电流i*的决定等处理的计算机、和与该计算机连接的作为驱动电路的逆变器,根据由计算机决定的目标供给电流i*来从逆变器向转向马达46a供给电流i。根据以上说明的基本转向控制,控制为通过控制1对车轮转向装置12各自产生的转向力、即转向转矩tq,以使左右车轮10各自的转向位置ψ成为目标转向位置ψ*。ii)用于实现不足转向趋势(understeer tendency)的转向位置的变更
[0058]
在车辆转弯且该转弯剧烈时,从车辆的转弯的稳定性的观点考虑,优选上述车辆的转弯特性成为不足转向趋势。转弯剧烈(turning is severe)是指转弯时作用于车身的离心力很大。鉴于此,在本转向系统中,为了使上述车辆的转弯特性在以转弯的剧烈度为指标的转弯指标超过设定阈值的情况下比未超过设定阈值的情况更成为不足转向趋势而变更左右车轮中的一方的转向位置ψ,详细而言,变更转弯中的外侧的车轮10(以下,存在称为“转弯外轮”的情况,并存在将内侧的车轮称为“转弯内轮”的情况)的转向位置ψ。其中,不足转向趋势是指当具有通常等级的直行稳定性的汽车在恒定圆转弯中以一定的转向角提高了驱动力(速度)时前轮的接地摩擦力小于离心力而车辆表现出朝向圆的外侧的举动的车辆的悬架机构的特性。或者,是指为了使恒定的转弯持续而需要转动方向盘的状态等。
[0059]
在本转向系统中,作为转弯指标,采用左右的车轮转向装置12的转向马达46a实际发挥的转向力之差、即左右的车轮转向装置12各自所具有的转向马达46a的转向转矩tq
l
、tq
r
之差亦即转矩差δtq(=|tq
l
‑
tq
r
|),在该转矩差δtq超过作为设定阈值的阈值转矩差δtq0的情况下,转弯外轮的转向位置ψ被变更。
[0060]
由于转向转矩tq、详细而言是使车轮10转向至某个转向位置ψ的转向转矩tq或者用于将车轮10维持在某个转向位置ψ的转向转矩tq需要大于自动回正转矩,所以车辆行驶速度(以下,存在称为“车速”的情况)越高、车轮10的转向位置ψ越大(越远离直行状态位置)则越大。另外,另一方面,车轮10所分担的车身的载荷w
s
(以下,存在称为“分担载荷w
s”的情况)越大,则转向转矩tq越大。若将转弯外轮的转向转矩tq设为外轮转矩tq
o
、将转弯内轮的转向转矩tq设为内轮转矩tq
i
,则外轮转矩tq
o
、内轮转矩tq
i
在一定的车速下如图3的图表所示那样根据转向位置ψ而变化,左右车轮中的分担载荷w
sl
、w
sr
之差亦即分担载荷差δw
s
越大,则针对左右车轮10的转向转矩tq
l
、tq
r
之差δtq、即外轮转矩tq
o
、内轮转矩tq
i
之差亦即转矩差δtq越大。由于车辆的转弯越剧烈,则分担载荷差δw
s
越大,所以转矩差δtq能够成为上述转弯指标。作为转弯指标,还能够采用车身所产生的横向加速度、车辆的横摆率等,但通过将转矩差δtq作为转弯指标,能够获得不另外需要某些传感器的优点。
[0061]
各转向ecu16根据来自逆变器的信息来检测实际供给至转向马达46a的电流i(以
下,存在称为“实际供给电流i”的情况),根据该实际供给电流i,按照先前说明的关系来推断实际发挥的转向转矩tq(以下,存在称为“实际转向转矩tq”的情况),并将关于该实际转向转矩tq的信息发送至操作ecu18。操作ecu18根据接收到的针对左右车轮10的实际转向转矩tq
l
、tq
r
来确定上述转矩差δtq,在该转矩差δtq超过阈值转矩差δtq0的情况下,认定为是剧烈的转弯,执行用于减小转弯外轮的转向位置ψ的转向位置变更处理。
[0062]
其中,在本转向系统中,用于判断转向位置变更处理的执行的上述阈值转矩差δtq0根据在车辆中应该实现的行驶特性而被设定为不同的值。即,阈值转矩差δtq0能够变更。在本车辆中,作为车辆的行驶模式,准备了舒适模式(comfort mode)和运动模式这2个模式,通过驾驶员的操作来选择这2个行驶模式中的任一个。舒适模式是重视车辆的乘坐舒适性、车辆的行驶稳定性的行驶模式,运动模式是重视干净利落的行驶、车辆的操作响应性的行驶模式。在选择了舒适模式的情况下,操作ecu18为了扩大转向位置变更处理的执行范围而将阈值转矩差δtq0设定为比较小的值亦即舒适模式值δtq
c
,在选择了运动模式的情况下,操作ecu18为了缩窄转向位置变更处理的执行范围而将阈值转矩差δtq0设定为比较大的值亦即运动模式值δtq
s
。
[0063]
在执行转向位置变更处理的情况下,操作ecu18判断左前轮10fl与右前轮10fr中的哪个轮成为转弯外轮。该判断将左右的车轮转向装置12所产生的转向力进行比较、即将上述的相对于左前轮10fl的实际转向转矩tq
l
与相对于右前轮10fr的实际转向转矩tq
r
进行比较,将较大的一方(严格来说是绝对值较大的一方)的前轮10f认定为转弯外轮。转弯外轮的认定也能够根据方向盘56的操作的朝向来进行,但例如在车辆进行自动驾驶而方向盘56未被驾驶员操作的情况下,基于实际转向转矩tq的比较进行的转弯外轮的认定是特别有效的。
[0064]
在转向位置变更处理中,将对于被认定出的转弯外轮的目标转向转矩tq*变更转向转矩变更量dtq。详细而言,在左前轮10fl被认定为转弯外轮的情况下,将对于左前轮10fl的目标转向转矩tq
l
*减少转向转矩变更量dtq,在右前轮10fr被认定为转弯外轮的情况下,将对于右前轮10fr的目标转向转矩tq
r
*减少转向转矩变更量dtq。
[0065]
其中,在本转向系统中,转向转矩变更量dtq根据车辆的操作状态而变更。详细而言,转向转矩变更量dtq通常为通常值dtq
n
,但在对于车辆进行了比较大的制动操作的情况、以及在对于车辆进行了比较大的加速操作的情况下,转向转矩变更量dtq被减小变更。具体而言,操作ecu18根据由搭载于车辆的前后加速度传感器66(参照图1)检测出的前后加速度gx(在加速中为正值,在减速中为负值),在前后加速度gx小于减速侧阈值gx
b
的情况下,将转向转矩变更量dtq变更为减速时值dtq
b
(<dtq
n
),在前后加速度gx大于加速侧阈值gx
a
的情况下,将转向转矩变更量dtq变更为加速时值dtq
a
(<dtq
n
)。其中,减速时值dtq
b
被设定得小于加速时值dtq
a
。这样,通过变更转向转矩变更量dtq,从而在本转向系统中,能够以驾驶员在转向操作中的手感适当化为目的来进行横向力顺应转向的作用中的顺应性的调整,另外,能够以车辆的转弯稳定性的程度适当化为目的来进行转弯外轮的转向位置ψ的调整。
[0066]
iii)控制流程操作
[0067]
ecu18、各转向ecu16分别具有计算机,通过分别以很短的时间间隔(例如几msec~几十msec)由操作ecu18的计算机反复执行图4中流程图所示的转向综合控制程序、由各转
向ecu16的计算机反复执行图5中流程图所示的车轮转向程序来进行包括上述基本转向控制以及转向位置变更处理的转向控制。为了对本转向系统的转向控制进行说明,以下简单地对遵照这些程序的处理的流程进行说明。
[0068]
在操作ecu18中执行的遵照转向综合控制程序的处理中,首先在步骤1(以下,存在称为“s1”的情况。其他步骤也同样)中,判定上述车辆是否处于自动驾驶中。在不处于自动驾驶中的情况下,在s2中根据转向传感器58的检测来取得方向盘56的操作位置δ,在s3中,决定目标转向位置ψ*。当在s1中判定为处于自动驾驶中的情况下,在s4中,接收来自自动驾驶系统的关于目标转向位置ψ*的信息。
[0069]
接着,在s5中,决定左右车轮10各自的目标马达旋转角θ*,在s6中,从各转向ecu16分别接收左右的车轮转向装置12所具有的转向马达46a的关于实际马达旋转角θ的信息。在s7中,根据针对车轮转向装置12各自的转向马达46a所决定的目标马达旋转角θ*以及接收到的实际马达旋转角θ来决定关于各车轮转向装置12的马达旋转角偏差δθ。然后,在s8中,根据上述式来决定车轮转向装置12各自的转向马达46a应该产生的转向转矩tq亦即目标转向转矩tq
l
*、tq
r
*。
[0070]
在接下来的s9中,执行稍后将详细说明的转向位置变更处理子例程,然后,在s10中,将关于在s8中决定出的目标转向转矩tq
l
*、tq
r
*或在s9中被变更了的目标转向转矩tq
l
*、tq
r
*的信息发送至各转向ecu16。
[0071]
在各转向ecu16中执行的遵照车轮转向程序的处理中,首先在s11中,将经由逆变器取得的实际马达旋转角θ的信息发送至操作ecu18。在接下来的s12中,检测经由逆变器而实际供给至转向马达46a的电流亦即实际供给电流i,在s13中,将关于根据该实际供给电流i推断出的实际转向转矩tq的信息发送至操作ecu18。
[0072]
在接下来的s14中,从操作ecu18取得关于目标转向转矩tq*的信息,在s15中,根据该目标转向转矩tq*来决定应该供给至转向马达46a的电流亦即目标供给电流i*。然后,在s16中,将基于该目标供给电流i*的电流i供给至转向马达46a。
[0073]
在先前说明的转向综合控制程序的s9中,执行图6中流程图所示的转向位置变更处理子例程。在按照该子例程的处理中,首先,在s21中,从各转向ecu16接收关于实际转向转矩tq
l
、tq
r
的信息。在接下来的s22中,判定上述车辆的行驶模式是上述的舒适模式还是上述的运动模式。在为运动模式的情况下,在s23中将阈值转矩差δtq0设定为运动模式值δtq
s
,在为舒适模式的情况下,在s24中将阈值转矩差δtq0设定为舒适模式值δtq
c
。然后,在s25中,将基于实际转向转矩tq
l
、tq
r
的转矩差δtq作为转弯指标,在该转矩差δtq超过阈值转矩差δtq0的情况下,执行s26以后的转向位置变更处理,在未超过阈值转矩差δtq0的情况下,跳过s26以后的转向位置变更处理。
[0074]
在执行转向位置变更处理的情况下,首先在s26中,根据前后加速度传感器66的检测来取得上述车辆所产生的前后加速度gx。在s27中,判定前后加速度gx是否小于减速侧阈值gx
b
(前后加速度gx为负值,绝对值大于减速侧阈值gx
b
),在判定为前后加速度gx小于减速侧阈值gx
b
的情况下,在s28中将转向转矩变更量dtq设定为减速时值dtq
b
。在判定为前后加速度gx为减速侧阈值gx
b
以下的情况下,跳过s28。接下来,在s29中判定前后加速度gx是否大于加速侧阈值gx
a
,在判定为前后加速度gx大于加速侧阈值gx
a
的情况下,在s30中将转向转矩变更量dtq设定为加速时值dtq
a
。在判定为前后加速度gx为加速侧阈值gx
a
以下的情况
下,在s31中将转向转矩变更量dtq设定为通常值dtq
n
。
[0075]
在接下来的s32中,根据实际转向转矩tq
l
、tq
r
来进行转弯外轮判定。具体而言,在左前轮10fl的实际转向转矩tq
l
大于右前轮的10fr的实际转向转矩tq
r
的情况下,将左前轮10fl认定为转弯外轮,在右前轮10fr的实际转向转矩tq
r
大于左前轮10fl的实际转向转矩tq
l
的情况下,将右前轮10fr认定为转弯外轮。在将左前轮10fl认定为转弯外轮的情况下,在s33中从对于左前轮10fl的目标转向转矩tq
l
*减去转向转矩变更量dtq,在将右前轮10fr认定为转弯外轮的情况下,在s34中从对于右前轮10fr的目标转向转矩tq
r
*减去转向转矩变更量dtq。
[0076]
[a]车辆用转向系统的结构
[0077]
第2实施例的转向系统与第1实施例的转向系统同样,是线控转向式的转向系统,但与第1实施例的转向系统不同,如图7中示意性所示那样,为了使左右的前轮10fl、10fr以及左右的后轮10rl、10rr各自单独转向而具有前轮侧、后轮侧的2对车轮转向装置12,与2对车轮转向装置12对应地具备2对转向ecu16。2对转向ecu16分别与can22连接,操作ecu18综合控制这些转向ecu16。
[0078]
各车轮转向装置12与第1实施例的转向系统同样,被组装于车轮配设模块20内。该模块20具有与第1实施例的转向系统的模块20同样的结构,关于该模块20的结构以及车轮转向装置12的结构省略说明。另外,操作装置14也具有与第1实施例的转向系统的操作装置14同样的结构,关于该操作装置14的结构省略说明。
[0079]
此外,与搭载有第1实施例的转向系统的车辆不同,在搭载有本实施例的转向系统的车辆未设置前后加速度传感器66,而设置有用于对作用于车身的车宽方向的加速度亦即横向加速度进行检测的横向加速度传感器68。另外,在本转向系统中,可认为由2对转向ecu16、操作ecu18、can22构成对2对车轮转向装置12分别进行控制的控制器。
[0080]
[b]车辆用转向系统的控制
[0081]
i)基本转向控制
[0082]
本转向系统的基本的转向控制是根据转向请求、详细而言根据方向盘56的操作位置δ使2个前轮10f与2个后轮10r转向的控制。由于前轮10f的转向与第1实施例的转向系统中的基本转向控制涉及的转向相同,所以省略说明。
[0083]
若对后轮10r的转向进行说明,则操作ecu18除了根据前轮10f的目标转向位置ψ
r
*之外还根据操作位置δ和车辆行驶速度(以下,存在简称为“车速”的情况)v来决定后轮10r的目标转向位置ψ
r
*。简单而言,以如下方式来决定目标转向位置ψ
r
*:在车速v高时,使后轮10r向与前轮10f相同的方向(同相)转向,在车速v低时,使后轮10r向与前轮10f相反的方向(反相)转向。由于该目标转向位置ψ
r
*的决定手法是公知的,所以省略详细说明。
[0084]
各转向ecu16掌握车轮转向装置12的转向马达46a的马达旋转角θ,根据该马达旋转角θ的变化来确定车轮10的旋转速度亦即车轮旋转速(以下,存在简称为“车轮速”的情况)v
w
。各转向ecu16将关于该确定出的车轮速v
w
的信息发送至操作ecu18。操作ecu18根据接收到的关于各车轮速v
w
的信息,通过公知的手法来确定上述车辆的车速v,并在后轮10r的目标转向位置ψ
r
*的决定中利用该确定出的车速v。
[0085]
由于操作ecu18所进行的基于目标转向位置ψ
r
*、ψ
r
*的前后左右的车轮10的目标转向转矩tq
fl
*、tq
fr
*、tq
rl
*、tq
rr
*的决定、各转向ecu16所进行的基于目标转向转矩tq*的目标
供给电流i*的决定等可通过与第1实施例的转向系统同样的手法进行,所以关于这些在此省略详细说明。
[0086]
ii)用于实现不足转向趋势的转向位置的变更
[0087]
在本转向系统中,也与第1实施例的转向系统同样,在车辆的转弯剧烈时,为了使车辆的转弯特性成为不足转向趋势,操作ecu18执行转向位置变更处理。
[0088]
在本转向系统中,作为用于判断转向位置变更处理的执行的有无的转弯指标,采用了横向加速度gy,而非在第1实施例的转向系统中采用的上述转矩差δtq。在由横向加速度传感器68检测出的横向加速度gy(由于在左右符号不同,所以严格来说是横向加速度gy的绝对值)大于阈值加速度gy0时,操作ecu18执行转向位置变更处理。其中,在本转向系统中,不基于行驶模式的选择进行阈值加速度gy0的变更。此外,作为转弯指标,例如也可以采用车辆的横摆率来代替横向加速度gy。
[0089]
在本转向系统中,操作ecu18在转向位置变更处理中将前轮侧的转弯外轮10f的目标转向转矩tq*减小针对前轮10f设定的前轮侧转矩变更量dtq
f
,将后轮侧的转弯外轮10r的目标转向转矩tq*增大针对后轮10r设定的后轮侧转矩变更量dtq
r
。具体而言,在左前轮10fl为转弯外轮的情况下,将左前轮10fl的目标转向转矩tq
fl
*减小前轮侧转矩变更量dtq
f
,在右前轮10fr为转弯外轮的情况下,将右前轮10fr的目标转向转矩tq
fr
*减小前轮侧转矩变更量dtq
f
,在左后轮10rl为转弯外轮的情况下,将左后轮10rl的目标转向转矩tq
rl
*增大后轮侧转矩变更量dtq
r
,在右后轮10rr为转弯外轮的情况下,将右后轮10rr的目标转向转矩tq
rr
*增大后轮侧转矩变更量dtq
r
。由此,前轮侧的转弯外轮10f的转向位置ψ减小、后轮侧的转弯外轮10r的转向位置ψ增大,车辆的转弯特性进一步成为不足转向趋势。
[0090]
在本转向系统中,操作ecu18根据方向盘56的操作位置δ而非左右车轮10各自的转向转矩tq来确定车辆的转弯方向,并根据该确定来决定左右车轮10中的哪个车轮为转弯外轮。此外,在本转向系统中,不进行在第1实施例的转向系统中进行的基于车辆的加减速的转向转矩变更量dtq的变更。
[0091]
iii)控制流程
[0092]
通过分别以很短的时间间隔(例如几msec~几十msec)由操作ecu18的计算机反复执行图8中流程图所示的转向综合控制程序、由各转向ecu16的计算机反复执行图9中流程图所示的车轮转向程序来进行包括上述基本转向控制以及转向位置变更控制处理的转向控制。为了对本转向系统的转向控制进行说明,以下对遵照这些程序的处理的流程简单进行说明。
[0093]
在操作ecu18中执行的遵照转向综合控制程序的处理中,首先在s51中,从各转向ecu16接收关于各车轮10的车轮速v
w
的信息,在s52中,根据各车轮10的车轮速v
w
来确定上述车辆的车速v。接下来,在s53中,根据转向传感器58的检测来取得方向盘56的操作位置δ,在s54中,根据所取得的操作位置δ与确定出的车速v来决定前轮10f的目标转向位置ψ
r
*以及后轮10r的目标转向位置ψ
r
*。然后,在s55中,根据目标转向位置ψ
r
*、目标转向位置ψ
r
*来决定关于各车轮转向装置12的转向马达46a的目标马达旋转角θ*,在s56中,从各转向ecu16接收关于车轮转向装置12的转向马达46a的实际马达旋转角θ的信息。在接下来的s57中,决定关于各转向马达46a的马达旋转角偏差δθ,在s58中,按照上述公式来决定关于各车轮转向装置12的转向马达46a的目标转向转矩tq
fl
*、tq
fr
*、tq
rl
*、tq
rr
*。
[0094]
在接下来的s59中,根据横向加速度传感器68的检测来取得横向加速度gy,在s60中,判定横向加速度gy是否大于阈值加速度gy0。在判定为横向加速度gy大于阈值加速度gy0的情况下,执行从s61开始的转向位置变更处理,在判定为横向加速度gy为阈值加速度gy0以下的情况下,跳过转向位置变更处理。
[0095]
在转向位置变更处理中,在s61中,根据所取得的方向盘56的操作位置δ来确定车辆的转弯方向,在s62中,对确定出的车辆的转弯方向是左方向还是右方向进行判定。在车辆进行左转弯的情况下,在s63中将右前轮10fr的目标转向转矩tq
fr
*减小前轮侧转矩变更量dtq
f
,在s64中将右后轮10rr的目标转向转矩tq
rr
*增大后轮侧转矩变更量dtq
r
。在车辆进行右转弯的情况下,在s65中将左前轮10fl的目标转向转矩tq
fl
*减小前轮侧转矩变更量dtq
f
,在s66中将左后轮10rl的目标转向转矩tq
rl
*增大后轮侧转矩变更量dtq
r
。
[0096]
在s58中决定出或在s63~s66中变更了的关于各车轮转向装置12的转向马达46a的目标转向转矩tq
fl
*、tq
fr
*、tq
rl
*、tq
rr
*在s67中被作为信息发送至各转向ecu16。
[0097]
在各转向ecu16中执行的遵照车轮转向程序的处理中,首先在s71中根据转向马达46a的实际马达旋转角θ来确定车轮速v
w
,在s72中,将关于该车轮速v
w
的信息发送至操作ecu18,在s73中,将实际马达旋转角θ的信息发送至操作ecu18。
[0098]
在接下来的s74中,从操作ecu18取得关于目标转向转矩tq*的信息,在s75中,根据该目标转向转矩tq*来决定应该供给至转向马达46a的电流亦即目标供给电流i*。然后,在s76中,将基于该目标供给电流i*的电流i供给至转向马达46a。
[0099]
[变形例]
[0100]
在上述第2实施例的转向系统中,当转弯剧烈的情况下,变更左右的前轮10f的一方以及左右的后轮10r的一方的转向位置ψ,但本发明的转向系统也可以仅变更左右的后轮10r的一方的转向位置ψ。
[0101]
上述第1实施例的转向系统、上述第2实施例的转向系统均在转弯剧烈的情况下通过变更目标转向转矩tq*来变更车轮10的转向位置ψ,但本发明的转向系统例如可以通过变更目标转向位置ψ*、目标马达旋转角θ*、目标供给电流i*的1个以上来变更车轮10的转向位置ψ。
[0102]
上述第1实施例的转向系统、上述第2实施例的转向系统均在转弯剧烈的情况下变更转弯外轮的转向位置ψ,但本发明的转向系统也可以变更转弯内轮的转向位置ψ。
[0103]
上述第1实施例的转向系统、上述第2实施例的转向系统均在基本转向控制中根据马达旋转角偏差δθ来决定目标转向转矩tq*,并根据该目标转向转矩tq*来决定目标供给电流i*,但本发明的转向系统也可以根据马达旋转角偏差δθ来直接决定目标供给电流i*。
[0104]
针对上述第1实施例的转向系统、上述第2实施例的转向系统均未特别言及在基本转向控制中决定的左右车轮10的目标转向位置ψ*,但本发明的转向系统例如也可以根据平行几何(parallel geometry)将左右车轮10的目标转向位置ψ*决定为相同的值,另外,例如也可以根据阿克曼几何将左右车轮10的目标转向位置ψ*决定为相互不同的值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1