一种用于水下淤泥清理的水下机器人的制作方法
一种用于水下淤泥清理的水下机器人
[0001]
本申请是申请日为2019年07月03日、名称为“一种水底淤泥处理放入防缠绕水下机器人”、申请号为201910595972.2的发明专利申请的分案申请。
技术领域
[0002]
本发明涉及机器人技术领域,尤其涉及一种用于水下淤泥清理的水下机器人。
背景技术:
[0003]
水下机器人也称无人遥控潜水器,是一种工作于水下的极限作业机器人,水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发河流的重要工具,常用于河道水底的淤泥清理工作。
[0004]
现有的水下机器人为各种科技产品组合而成,结构较为复杂,在进行水底清除淤泥的工作时,容易被生长在河床上的水草缠绕住,导致无法正常工作,并且灵活性较差,现有技术大多采用机器人管线包来防止脐带缆绳的缠绕问题,但在具体实施过程中,由于施工环境条件的多变,管线包收放线操作不方便,在使用前还得特别加装到脐带缆绳上,耗时费力,间接增加了工时和成本。
技术实现要素:
[0005]
本发明的目的是为了解决现有技术中存在的缺点,而提出的一种用于水下淤泥清理的水下机器人,其通过设置监控机构、推进机构、强制搅拌刀片和驱动机构,并且将机器人本体设置为扁平状,结构简单合理,圆环形扁平饼状结构,不易被缠绕,操作安全方便,监控机构能对机器人周边进行实时记录,并设有强制搅拌刀片,能在清除淤泥的同时将水下的网和水草进行拨开或割掉,提高机器人的灵活性。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种用于水下淤泥清理的水下机器人,包括两个机器人本体,所述机器人本体的内部固定安装有蓄电池,两个所述机器人本体通过连杆固定连接,所述连杆上安装有用于监控水底淤泥情况的监控机构,两个所述机器人本体的侧壁上均安装有用于驱动机器人在水底前进的推进机构,所述机器人本体的下端固定连接有清淤仓,所述清淤仓的下端通过法兰固定连接有强制搅拌刀片,所述机器人本体的下端固定连接有安装板,所述安装板的下端安装有用于支撑清淤仓的支撑机构,两个所述机器人本体的下端共同固定连接有动力仓,所述动力仓内安装有用于驱动强制搅拌刀片旋转的驱动机构,所述机器人本体的侧壁上固定安装有与蓄电池耦合的照明灯。
[0008]
优选地,所述监控机构包括固定块和摄像头,所述固定块固定连接在连杆的上,所述摄像头固定安装在固定块的上端,且所述摄像头与蓄电池耦合。
[0009]
优选地,所述推进机构包括两个推进涡轮,所述推进涡轮固定安装在机器人本体的侧壁上,所述推进涡轮上安装有涡轮电机,且所述涡轮电机与蓄电池耦合。
[0010]
优选地,所述支撑机构包括大臂和二臂,所述大臂固定连接在安装板的下端,所述
二臂固定连接在大臂的下端,所述二臂的下端固定连接在清淤仓的侧壁上。
[0011]
优选地,所述驱动机构包括电机,所述电机固定安装在动力仓内,所述电机的输出轴上同轴固定连接有主齿轮,所述动力仓内底部下端两侧均转动连接有与主齿轮啮合的副齿轮,所述副齿轮同轴固定连接有主动轮,所述清淤仓内通过转轴转动连接有从动轮,所述主动轮与从动轮通过皮带传动连接,所述从动轮与强制搅拌刀片同轴固定连接。
[0012]
优选地,所述蓄电池为可充电式蓄电池。
[0013]
本发明具有以下有益效果:
[0014]
1、通过将机器人本体设置为环形扁平饼状结构,同时其余各结构也采用圆环形状结构,使机器人结构简单合理,不易被水底河床上生长的水草缠绕,操作安全方便;
[0015]
2、通过设置监控机构、推进机构、强制搅拌刀片和驱动机构,可以对机器人周边的情况进行实时记录,并且强制搅拌刀片可以在清除淤泥的同时将水下的网和水草拨开或者割除,提高机器人工作的灵活性与安全性。
附图说明
[0016]
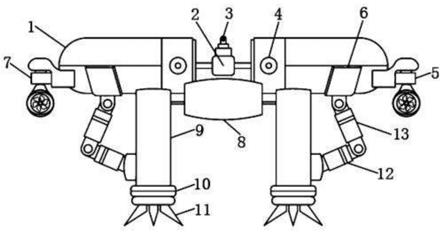
图1为本发明提出的一种用于水下淤泥清理的水下机器人的结构示意图;
[0017]
图2为本发明提出的动力机构的机构示意图。
[0018]
图中:1机器人本体、2固定块、3摄像头、4照明灯、5涡轮电机、6安装板、7推进涡轮、8动力仓、9清淤仓、10法兰、11强制搅拌刀片、12二臂、13大臂、14电机、15主动轮、16从动轮、17转轴、18主齿轮、19副齿轮。
具体实施方式
[0019]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0020]
在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0021]
参照图1-2,一种用于水下淤泥清理的水下机器人,包括两个机器人本体1,机器人本体1的内部固定安装有蓄电池,两个机器人本体1通过连杆固定连接,连杆上安装有用于监控水底淤泥情况的监控机构,监控机构包括固定块2和摄像头3,固定块2固定连接在连杆的上,摄像头3固定安装在固定块2的上端,且摄像头3与蓄电池耦合。
[0022]
两个机器人本体1的侧壁上均安装有用于驱动机器人在水底前进的推进机构,推进机构包括两个推进涡轮7,推进涡轮7固定安装在机器人本体1的侧壁上,推进涡轮7上安装有涡轮电机5,且涡轮电机5与蓄电池耦合。
[0023]
机器人本体1的下端固定连接有清淤仓9,清淤仓9的下端通过法兰10固定连接有强制搅拌刀片11,机器人本体1的下端固定连接有安装板6,安装板6的下端安装有用于支撑清淤仓9的支撑机构,支撑机构包括大臂13和二臂12,大臂13固定连接在安装板6的下端,二臂12固定连接在大臂13的下端,二臂的下端固定连接在清淤仓9的侧壁上。
[0024]
两个机器人本体1的下端共同固定连接有动力仓8,动力仓8内安装有用于驱动强
制搅拌刀片11旋转的驱动机构,驱动机构包括电机14,电机14固定安装在动力仓8内,电机14的输出轴上同轴固定连接有主齿轮18,动力仓8内底部下端两侧均转动连接有与主齿轮18啮合的副齿轮19,副齿轮19同轴固定连接有主动轮15,清淤仓9内通过转轴17转动连接有从动轮16,主动轮15与从动轮16通过皮带传动连接,从动轮16与强制搅拌刀片11同轴固定连接。
[0025]
机器人本体1的侧壁上固定安装有与蓄电池耦合的照明灯4,蓄电池为可充电式蓄电池。
[0026]
需要说明的是,上述涉电技术均为现有技术。
[0027]
本发明中,当机器人在水下清淤时,蓄电池为涡轮电机5供电,带动推进涡轮7转动,推动机器人前进,同时照明灯4提供照明光线,摄像头3时刻监控机器人周边情况;当摄像头3监控到淤泥较多地域时,蓄电池供电电机14,启动电机,通过主齿轮18啮合副齿轮19、以及主动轮15和从动轮16的传动作用,驱动强制搅拌刀片11高速旋转,在清除河底淤泥的同时割断或者拨开河床上的水草和网,保证机器人本体不会被水草缠绕导致无法继续前进。
[0028]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1