可变螺距螺旋桨控制装置及控制方法、以及存储介质与流程
[0001]
本发明涉及一种可变螺距螺旋桨控制装置、可变螺距螺旋桨控制方法以及可变螺距螺旋桨控制程序。
背景技术:
[0002]
作为船舶用的螺旋桨装置,存在一种构成为能够变更螺旋推进器的螺旋桨部分相对于垂直方向的角度(下面称为“桨叶角”)的可变螺距螺旋桨(cpp:controllable pitch propeller)。在多数情况下,使用自动负荷控制装置(alc:automatic load control)来控制可变螺距螺旋桨。在因天气或潮流而导致主机关过负荷时,自动负荷控制装置进行使可变螺距螺旋桨的桨叶角减小的控制(例如专利文献1)。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2010-132161号公报
技术实现要素:
[0006]
发明要解决的问题
[0007]
现有技术的自动负荷控制装置进行以下控制:在机关的实际负荷超过目标负荷时判断为过负荷,使可变螺距螺旋桨的桨叶角减小,之后当过负荷消除时,使桨叶角增加。然而,当主机关被电子化且负荷急剧地变化时,通过上述的方法无法进行平滑的桨叶角控制。特别存在如下问题:在过负荷的程度(下面称为“过负荷程度”)小时,如果使桨叶角急剧地减小,则发生摆动而使控制不稳定。
[0008]
本发明是鉴于这样的课题而完成的,其目的在于,通过根据过负荷程度对可变螺距螺旋桨的桨叶角进行控制,来实现平滑的桨叶角控制。
[0009]
用于解决问题的方案
[0010]
为了解决上述课题,本发明的某个方式的可变螺距螺旋桨控制装置具有:获取部,其获取向船舶的内燃机供给的燃料供给量、该内燃机的转速以及表示该内燃机是否为过负荷状态的状态信号;计算部,在该内燃机为过负荷状态的情况下,所述计算部计算燃料供给量与同内燃机的转速预先对应的最大燃料供给量之差或该差相对于最大燃料供给量的比例;以及控制部,其根据由计算部计算出的差或比例来控制可变螺距螺旋桨的桨叶角。
[0011]
本发明的另一方式也是一种可变螺距螺旋桨控制装置。该装置具有:获取部,其获取船舶的内燃机的转速的值和负荷的值;评价部,在该内燃机为根据内燃机的负荷和转速决定的过负荷状态的情况下,所述评价部评价过负荷程度;以及控制部,其根据由评价部评价的过负荷程度来控制可变螺距螺旋桨的桨叶角的减小。
[0012]
本发明的另一方式是一种可变螺距螺旋桨控制方法。该方法包括:获取步骤,获取向船舶的内燃机供给的燃料供给量、该内燃机的转速以及表示该内燃机是否为过负荷状态的状态信号;判断步骤,根据在获取步骤中获取到的状态信号来判断该内燃机是否为过负
荷状态;计算步骤,在判断步骤中判断为该内燃机为过负荷状态的情况下,计算燃料供给量与同内燃机的转速预先对应的最大燃料供给量之差或该差相对于最大燃料供给量的比例;以及控制步骤,根据通过计算步骤计算出的差或比例来控制可变螺距螺旋桨的桨叶角。
[0013]
本发明的另一方式是一种存储有可变螺距螺旋桨控制程序的计算机可读取的存储介质。该程序用于使计算机执行以下步骤:获取步骤,获取向船舶的内燃机供给的燃料供给量、该内燃机的转速以及表示该内燃机是否为过负荷状态的状态信号;判断步骤,根据在获取步骤中获取到的状态信号来判断该内燃机是否为过负荷状态;计算步骤,在判断步骤中判断为该内燃机为过负荷状态的情况下,计算燃料供给量与同内燃机的转速预先对应的最大燃料供给量之差或该差相对于最大燃料供给量的比例;以及控制步骤,根据通过计算步骤计算出的差或比例来控制可变螺距螺旋桨的桨叶角。
[0014]
此外,以上结构要素的任意组合、将本发明的结构要素或表现在方法、装置、程序、记录有程序的瞬态或非瞬态的存储介质、系统等之间相互置换而得到的方式,作为本发明的方式也是有效的。
[0015]
发明的效果
[0016]
根据本发明,能够实现平滑的桨叶角控制。
附图说明
[0017]
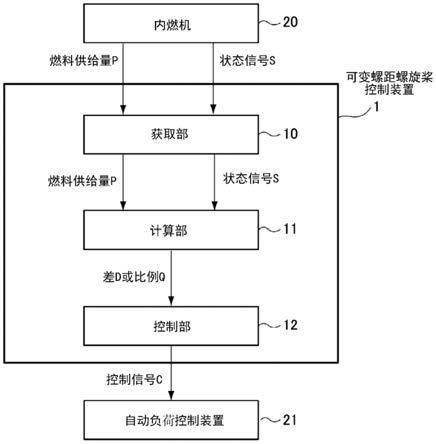
图1是示出第一实施方式至第三实施方式所涉及的可变螺距螺旋桨控制装置的结构的功能框图。
[0018]
图2是示出第二实施方式中的可变螺距螺旋桨的桨叶角的随时间变化的曲线图。
[0019]
图3是示出第三实施方式中的可变螺距螺旋桨的桨叶角的随时间变化的曲线图。
[0020]
图4是示出第四实施方式所涉及的可变螺距螺旋桨控制装置的结构的功能框图。
[0021]
图5是示出第四实施方式中的内燃机的转速与负荷之间的关系的曲线图。
[0022]
图6是第五实施方式所涉及的可变螺距螺旋桨控制方法的流程图。
[0023]
附图标记说明
[0024]
1:可变螺距螺旋桨控制装置;2:可变螺距螺旋桨控制装置;10:获取部;11:计算部;12:控制部;13:评价部;s1:获取步骤;s2:判断步骤;s3:计算步骤;s4:控制步骤。
具体实施方式
[0025]
下面,基于优选的实施方式,参照附图来说明本发明。对各附图中示出的同一或等同的结构要素、构件、处理标注相同的附图标记,并适当地省略重复的说明。
[0026]
图1是示出本发明的第一实施方式至第三实施方式所涉及的可变螺距螺旋桨控制装置1的结构的功能框图。可变螺距螺旋桨控制装置1具有获取部10、计算部11以及控制部12。获取部10与作为船舶的主机关的内燃机20连接。控制部12与用于使可变螺距螺旋桨的桨叶角变化的自动负荷控制装置21连接。
[0027]
[第一实施方式]
[0028]
下面,参照图1来说明第一实施方式所涉及的可变螺距螺旋桨控制装置1的动作。
[0029]
获取部10从内燃机20获取向内燃机20供给的燃料供给量p和表示内燃机20是否为过负荷状态的状态信号s。获取部10将获取到的燃料供给量p和状态信号s发送到计算部11。
[0030]
由状态信号s表示的是否为过负荷状态的基准基于内燃机从负荷受到的影响、耗油量等来决定。如果负荷超过该基准,则判断为内燃机20处于过负荷状态。此时,自动负荷控制装置21进行使可变螺距螺旋桨的桨叶角减小的控制。由此内燃机20的负荷减小。
[0031]
计算部11存储有与内燃机20的转速预先对应的最大燃料供给量(未图示)。该最大燃料供给量是能够向正在以当前的转速动作的内燃机投入的最大的燃料供给量。如果被投入的燃料超过最大燃料供给量,则致使内燃机损坏等的风险升高。因而,要求向内燃机供给的燃料供给量始终比最大燃料供给量少。最大燃料供给量与实际燃料供给量之差或者该差相对于最大燃料供给量的比例被称为索引余量(日语:
インデックスマージン
),表示能够从当前的燃料投入量增加地投入的燃料的最大量。认为实际燃料供给量越接近最大燃料供给量、即索引余量越小,内燃机的负荷越高。因而,在内燃机处于过负荷状态时,能够通过计算索引余量,来获知过负荷程度。即,索引余量越大,过负荷程度越小,索引余量越小,过负荷程度越大。
[0032]
在从获取部10接收到的状态信号s表示内燃机20处于过负荷状态的情况下,计算部11计算最大燃料供给量与燃料供给量p之差d或者该差相对于最大燃料供给量的比例q、即索引余量。计算部11将计算出的差d或比例q发送到控制部12。
[0033]
控制部12根据从计算部11接收到的差d或比例q来控制可变螺距螺旋桨的桨叶角。当差d或比例q小时,过负荷程度大,因此需要使桨叶角快速地或者以大的角度(即,以更接近0的方式)减小,以迅速地消除过负荷。即,差d或比例q越小,控制部12使可变螺距螺旋桨的桨叶角的减小程度越大。反之,当差d或比例q大时,过负荷程度小,因此需要使桨叶角缓慢地或者以更小的角度减小,以实现平滑的控制。即,差d或比例q越大,控制部12使可变螺距螺旋桨的桨叶角的减小程度越小。控制部12生成与差d或比例q相应的桨叶角控制的控制信号c,并发送到自动负荷控制装置21。
[0034]
自动负荷控制装置21基于从控制部12接收到的控制信号c,来使可变螺距螺旋桨的桨叶角减小。即,当差d或比例q小从而过负荷程度大时,自动负荷控制装置21使桨叶角快速地或者以大的角度减小,反之,当差d或比例q大从而过负荷程度小时,自动负荷控制装置21使桨叶角缓慢地或者以小的角度减小。
[0035]
根据本实施方式,根据过负荷程度来控制可变螺距螺旋桨的桨叶角,因此能够实现平滑的桨叶角控制。
[0036]
[第二实施方式]
[0037]
接着,参照图1和图2来说明第二实施方式所涉及的可变螺距螺旋桨控制装置1的动作。在第二实施方式中,差d或比例q的值越小,控制部12使可变螺距螺旋桨的桨叶角的减小速度越快。
[0038]
下面,将操纵者通过操纵手柄操作设定的可变螺距螺旋桨桨叶角的目标值称为“手柄cpp指令值”。在没有进行自动负荷控制时,桨叶角取手柄cpp指令值。图2是示出可变螺距螺旋桨的桨叶角的随时间变化的曲线图。在此,图2的(a)是0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%时的桨叶角的随时间变化,图2的(b)是5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%时的桨叶角的随时间变化。即,与图2的(b)时相比,图2的(a)时的过负荷程度大。在此,差d是最大燃料供给量(每分钟)-燃料供给量(每分钟)的值。另外,比例q用%表示(最大燃料供给量-燃料供给量)/最大燃料供给量。其中,在此设为最大燃料供给
量为100l/分钟。
[0039]
参照图2的(a)来说明0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%时的可变螺距螺旋桨的桨叶角控制。设为在时刻t<t0时,内燃机20不处于过负荷状态。即,在t<t0时没有进行自动负荷控制,因此桨叶角取手柄cpp指令值。在t=t0时,内燃机20成为过负荷状态。在t=t0时,自动负荷控制装置21开始进行自动负荷控制,桨叶角开始减小。在t0≤t<t1时,控制部12进行与0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%相应的桨叶角控制。即,控制部12在t0≤t<t1时一边改变桨叶角的减小速度一边使桨叶角减小。随着桨叶角的减小,内燃机20的负荷减小,过负荷状态趋向消除。
[0040]
在t=t1时,内燃机20的过负荷状态消除。由于过负荷状态消除,因此自动负荷控制装置21将对桨叶角的控制从减小转为增大。在t1≤t<t2时,随着桨叶角增大,船的速度增加。在t=t2时,桨叶角恢复为手柄cpp指令值,自动负荷控制装置21结束自动负荷控制。
[0041]
接着,参照图2的(b)来说明5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%时的可变螺距螺旋桨的桨叶角控制。与图2的(a)同样地,设为在时刻t<t0时,内燃机20不处于过负荷状态。在t=t0时,内燃机20成为过负荷状态,自动负荷控制装置21开始进行自动负荷控制。由此,桨叶角开始减小。在t0≤t<t1时,控制部12进行与5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%相应的桨叶角控制。即,控制部12在t0≤t<t1时一边改变桨叶角的减小速度一边使桨叶角减小。随着桨叶角的减小,内燃机20的负荷减小,过负荷状态趋向消除。
[0042]
在t=t1时,内燃机20的过负荷状态消除。由于过负荷状态消除,因此自动负荷控制装置21将对桨叶角的控制从减小转为增大。在t1≤t<t2时,随着桨叶角增大,船的速度增加。在t=t2时,桨叶角恢复为手柄cpp指令值,自动负荷控制装置21结束自动负荷控制。
[0043]
如图示那样,在桨叶角减小的时间段、即t0≤t<t1时,无论在哪个时间点,图2的(a)中的桨叶角的减小速度都比图2的(b)中的桨叶角的减小速度快。换言之,控制部12进行以下控制:差d或比例q的值越小、即过负荷程度越大,使可变螺距螺旋桨的桨叶角的减小速度越快。由此,过负荷迅速地消除。反之,控制部12进行以下控制:差d或比例q的值越大、即过负荷程度越小,使桨叶角的变化速度越慢。由此实现平滑的负荷控制。
[0044]
根据本实施方式,能够迅速地消除过负荷程度大的过负荷,并且能够平滑地控制过负荷程度小的过负荷。
[0045]
[第三实施方式]
[0046]
接着,参照图1和图3来说明第三实施方式所涉及的可变螺距螺旋桨控制装置1的动作。在第三实施方式中,差d或比例q的值越小,控制部12使可变螺距螺旋桨的桨叶角越接近0度。
[0047]
图3是示出可变螺距螺旋桨的桨叶角的随时间变化的曲线图。在此,图3的(a)是0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%时的桨叶角的随时间变化,图3的(b)是5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%时的桨叶角的随时间变化。即,与图3的(b)时相比,图3的(a)时的过负荷程度大。在此,差d是最大燃料供给量(每分钟)-燃料供给量(每分钟)的值。另外,比例q用%表示(最大燃料供给量-燃料供给量)/最大燃料供给量。其中,在此设为最大燃料供给量为100l/分钟。
[0048]
参照图3的(a)来说明0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%时的可变螺距螺旋桨的桨叶角控制。设为在时间t<t0时,内燃机20不处于过负荷状态。即,在t<t0时没
有进行自动负荷控制,因此桨叶角取手柄cpp指令值。在t=t0时,内燃机20成为过负荷状态。在t=t0时,自动负荷控制装置21开始进行自动负荷控制,桨叶角开始减小。在t0≤t<t3时,控制部12进行与0l/分钟<差d≤5l/分钟时或者0%<比例q≤5%相应的桨叶角控制。即,控制部12在t0≤t<t3时一边改变桨叶角的减小速度一边使桨叶角减小。随着桨叶角的减小,内燃机20的负荷减小,过负荷状态趋向消除。
[0049]
在t=t3时,内燃机20的过负荷状态消除。此时,桨叶角的值取θ1。由于过负荷状态已消除,因此自动负荷控制装置21将对桨叶角的控制从减小转为增大。在t3≤t<t4时,随着桨叶角增大,船的速度增加。在t=t4时,桨叶角恢复为手柄cpp指令值,自动负荷控制装置21结束自动负荷控制。
[0050]
接着,参照图3的(b)来说明5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%时的可变螺距螺旋桨的桨叶角控制。与图3的(a)同样地,设为在时刻t<t0,内燃机20不处于过负荷状态。在t=t0,内燃机20成为过负荷状态,自动负荷控制装置21开始进行自动负荷控制。由此,桨叶角开始减小。在t0≤t<t5时,控制部12进行与5l/分钟<差d≤10l/分钟时或者5%<比例q≤10%相应的桨叶角控制。即,控制部12在t0≤t<t5时一边改变桨叶角的减小速度一边使桨叶角减小。随着桨叶角的减小,内燃机20的负荷减小,过负荷状态趋向消除。
[0051]
在t=t5时,内燃机20的过负荷状态消除。此时,桨叶角的值取θ2。由于过负荷状态已消除,因此自动负荷控制装置21将对桨叶角的控制从减小转为增大。在t5≤t<t6时,随着桨叶角增大,船的速度增加。在t=t6时,桨叶角恢复为手柄cpp指令值,自动负荷控制装置21结束自动负荷控制。
[0052]
如图示那样,为0≤θ1<θ2。即,控制部12进行以下控制:差d或比例q的值越小、即过负荷程度越大,使可变螺距螺旋桨的桨叶角越接近0度。由此,可靠地消除过负荷。反之,差d或比例q越大、即过负荷程度越小,控制部12使桨叶角的变化越小。由此,进行自动负荷控制的时间(t6-t0)变短,船的速度迅速地恢复。
[0053]
根据本实施方式,能够可靠地消除过负荷程度大的过负荷,并且在过负荷程度小的情况下能够迅速地恢复船的速度。
[0054]
[第四实施方式]
[0055]
图4是示出本发明的第四实施方式所涉及的可变螺距螺旋桨控制装置2的结构的功能框图。可变螺距螺旋桨控制装置2具有获取部10、评价部13以及控制部12。获取部10与作为船舶的主机关的内燃机20连接。控制部12与用于使可变螺距螺旋桨的桨叶角变化的自动负荷控制装置21连接。
[0056]
在具体地说明第四实施方式之前,参照图5来对根据内燃机的转速和负荷决定的过负荷状态进行说明。图5是示出内燃机的转速与负荷之间的关系的曲线图。下面,将内燃机的转速为r、负荷为l时的状态表示为(r、l)。状态(r、l)与图5的点对应。在图5中,将连接点(r3、0)和点(r5、l2)的曲线设为曲线1,将连接点(r1、0)和点(r5、l2)的曲线设为曲线2,将连接点(r2、0)和点(r4、l1)的曲线设为曲线3。另外,将由曲线1、曲线3以及横轴围成的区域设为区域1,将由曲线1、曲线2、曲线3以及横轴围成的区域设为区域2。此时,当点(r、l)处于曲线1的下方时,决定为内燃机不处于过负荷状态。另外,当点(r、l)处于曲线1的上方且曲线2的下方时,决定为内燃机处于第一过负荷状态。并且,当点(r、l)处于曲线2的上方时,决定为内燃机处于第二过负荷状态。与第一过负荷状态相比,第二过负荷状态的过负荷程
度大。另外,当内燃机处于第一过负荷状态时,与点(r、l)处于区域1时相比,点(r、l)处于区域2时的过负荷程度大。
[0057]
第二过负荷状态被决定为致使内燃机损坏等的风险升高的过负荷状态。例如供给了超过上述的最大燃料供给量的燃料的情况下的过负荷状态是第二过负荷状态。因而,需要使内燃机不成为第二过负荷状态地运转。换言之,曲线2上的点表示能够对正在以某转速动作的内燃机赋予的最大负荷的值。
[0058]
返回到图4。获取部10从内燃机20获取内燃机20的转速的值(下面表示为“转速r”)和负荷的值(下面表示为“负荷l”)。获取部10将获取到的转速r和负荷l发送到评价部13。
[0059]
在内燃机20为第一过负荷状态的情况下,评价部13评价过负荷程度。具体地说,评价部13评价表示内燃机20的状态的点(r、l)处于图5的区域1和区域2中的哪一个区域。评价部13将评价结果e发送到控制部12。
[0060]
控制部12根据从评价部13接收到的评价结果e来控制可变螺距螺旋桨的桨叶角。在过负荷程度大时,需要使桨叶角快速地或者以大的角度(即,以更接近0的方式)减小,以迅速地消除过负荷。即,过负荷程度越大,控制部12使可变螺距螺旋桨的桨叶角的减小程度越大。反之,当过负荷程度小时,需要使桨叶角缓慢地或者以更小的角度减小,以实现平滑的控制。即,过负荷程度越大,控制部12使可变螺距螺旋桨的桨叶角的减小程度越小。控制部12生成与过负荷程度相应的控制信号c,并发送到自动负荷控制装置21。
[0061]
自动负荷控制装置21基于从控制部12接收到的控制信号c来使可变螺距螺旋桨的桨叶角减小。即,在过负荷程度大时,自动负荷控制装置21使桨叶角快速地或者以大的角度减小,反之,在过负荷程度小时,自动负荷控制装置21使桨叶角缓慢地或以小的角度减小。
[0062]
根据本实施方式,能够基于内燃机的转速和负荷来判断过负荷程度,实现平滑的桨叶角控制。
[0063]
[第五实施方式]
[0064]
图6是本发明的第五实施方式所涉及的可变螺距螺旋桨控制方法的流程图。本方法包括获取步骤s1、判断步骤s2、计算步骤s3以及控制步骤s4。
[0065]
在获取步骤s1中,本方法获取向船舶的内燃机供给的燃料供给量和表示该内燃机是否为过负荷状态的状态信号。
[0066]
在判断步骤s2中,本方法根据在获取步骤s1中获取到的状态信号来判断该内燃机是否为过负荷状态。
[0067]
在计算步骤s3中,在判断步骤s2中判断为该内燃机为过负荷状态的情况下,本方法计算燃料供给量与同内燃机的转速预先对应的最大燃料供给量之差或该差相对于最大燃料供给量的比例。
[0068]
在控制步骤s4中,本方法根据在计算步骤s3中计算出的差或比例来控制可变螺距螺旋桨的桨叶角。
[0069]
根据本实施方式,根据过负荷程度来控制可变螺距螺旋桨的桨叶角,因此能够实现平滑的桨叶角控制。
[0070]
[第六实施方式]
[0071]
本发明的第六实施方式所涉及的可变螺距螺旋桨控制程序使计算机执行图6所示的流程。即,本程序使计算机执行以下步骤:获取步骤s1,获取向船舶的内燃机供给的燃料
供给量和表示该内燃机是否为过负荷状态的状态信号;判断步骤s2,根据在获取步骤s1中获取到的状态信号来判断该内燃机是否为过负荷状态;计算步骤s3,在判断步骤s2中判断为该内燃机为过负荷状态的情况下,计算燃料供给量与同内燃机的转速预先对应的最大燃料供给量之差或该差相对于最大燃料供给量的比例;以及控制步骤s4,根据在计算步骤s3中计算出的差或比例来控制可变螺距螺旋桨的桨叶角。
[0072]
根据本实施方式,能够在软件中安装用于根据过负荷程度来控制可变螺距螺旋桨的桨叶角的程序,因此能够使用计算机来实现平滑的桨叶角控制。
[0073]
以上,基于几个实施方式说明了本发明。这些实施方式是例示,本领域技术人员能够理解的是,在本发明的权利要求书内能够对这些实施方式进行各种变形和变更,另外,这样的变形例以及变更也在本发明的权利要求书的范围内。因而,本说明书中的描述和附图应被视为例证性的而非限制性的。
[0074]
(变形例)
[0075]
下面,对变形例进行说明。在变形例的说明中,对与实施方式相同或等同的结构要素、构件标注相同的附图标记。适当地省略与实施方式重复的说明,重点说明与实施方式不同的结构。
[0076]
[变形例1]
[0077]
在第二实施方式的说明中,在图2的(b)的控制中,当在过负荷状态消除后使桨叶角增加时,花费与图2的(a)相同的时间(t2-t1),来使桨叶角恢复为手柄cpp指令值。但是不限定于此,当过负荷程度小时,可以与过负荷程度大时相比,使桨叶角更迅速地恢复为手柄cpp指令值。根据本变形例,能够在平滑地控制过负荷程度小的过负荷的同时,使船的速度迅速地恢复。
[0078]
[变形例2]
[0079]
也可以将上述的实施方式应用于推进机的整合控制装置,通过将可变螺距螺旋桨的桨叶角控制与针对机关的燃料供给控制进行组合,来进行负荷控制。根据本变形例,能够实现更精密的负荷控制。
[0080]
上述的各实施方式和变形例的任意组合作为本发明的实施方式也是有用的。通过组合产生的新的实施方式同时具备所组合的各实施方式及变形例各自的效果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1