一种水下清洗机器人的制作方法
1.本实用新型涉及水下机器人技术领域,具体涉及一种水下清洗机器人。
背景技术:
2.水下机器人是一种具有智能功能的潜水器,是工作于水下的极限作业设备,能潜入水中代替人完成某些操作,由于水下环境恶劣危险,且人的潜水深度有限,所以水下机器人成为了开发海洋的重要工具。目前,水下机器人在海上救援、石油开发、地貌勘察、科研、水产养殖、水下船体检修清洁、潜水娱乐、城市管道检测等领域的作用开始显现出来,市场也正在兴起。
3.当水下机器人在水下进行清洗作业时,在使用时会存在以下问题:一是现有的水下机器人上都安装有摄像头,但摄像头的镜头通常都是朝向前方的,这样操控人员就不能很好的通过摄像头观察到水下机器人清洗作业的效果;二是现有水下机器人的推进器位置布置不合理,导致水下机器人在水中运行和对水下机器人的姿态进行调整时,存在运行和调整不顺畅等问题;三是清洗机构的结构存在设计不合理的问题,清洗效果不能很好的达到人们的需求。因此,研制开发一种能自由翻转,结构合理,姿态调整方便的水下清洗机器人是客观需要的。
技术实现要素:
4.本实用新型的目的在于提供一种能自由翻转,结构合理,姿态调整方便的水下清洗机器人。
5.本实用新型的目的是这样实现的,包括水上控制设备和机器人本体,机器人本体包括主舱体和安装在主舱体上方的副舱体,主舱体的两侧分别设置有一个机臂,主舱体、副舱体和机臂均为空腔结构,且各空腔相互连通形成整体密封仓,主舱体的两侧安装有履带行走机构,副舱体的顶部通过电缆与水上控制设备连接,每个机臂的前后两侧各设置有一个可独立变频控制的垂直推进器,四个垂直推进器两两对称布置,垂直推进器的推力方向与履带行走机构的前进方向垂直,每个机臂的中部均设置有一个可独立变频控制的水平推进器,两个水平推进器对称布置,水平推进器的推力方向与履带行走机构的前进方向平行,副舱体的顶部设置有清洗机构。
6.进一步的,清洗机构包括清洗密封盖和安装在清洗密封盖上的竖轴,清洗密封盖安装在副舱体的顶部,竖轴的下端伸入到副舱体内后传动连接有能够驱动竖轴来回转动的驱动机构,竖轴的上端连接有清洗机械臂,清洗机械臂的端部折弯后倾斜朝下布置,清洗机械臂上设置有供水软管,供水软管的下端设置有清洗枪头,上端与外接高压水软管连通。
7.进一步的,主舱体和副舱体的内部均设置有加强隔板。
8.进一步的,副舱体的前后两端分别设置有一个侧部摄像头。
9.进一步的,侧部摄像头的镜头倾斜朝下布置。
10.进一步的,每个机臂的前后两端各设置有一个照明灯。
11.进一步的,机臂后侧的底部设置有底部摄像头。
12.进一步的,副舱体的顶部设置有备用密封盖。
13.本实用新型的有益效果如下:一是本实用新型取消了普通水下机器人的浮力块,通过最大限度增加主舱体、副舱体和机臂排水量的方法来弥补取消浮力块带来的浮力损失,提高了水下清洗机器人的可靠性;二是本实用新型将空中多旋翼无人机的工作原理运用到水下清洗机器人上,安装了四个可独立变频控制的垂直推进器和两个可独立变频控制的水平推进器,相互配合可使水下清洗机器人实现水下xyz三轴的自由旋转以及水平前行,提高了水下清洗机器人在水下平移的适应性和稳定性;三是改进了两个水平推进器的安装位置,将其安装在机臂的中部,结构更加合理,使得水下清洗机器人在水下的运行和姿态调整更加平稳和顺畅,进而确保本实用新型具有较好的清洗效果。本实用新型能自由翻转,结构合理,姿态调整方便,具有显著的经济价值和社会价值。
附图说明
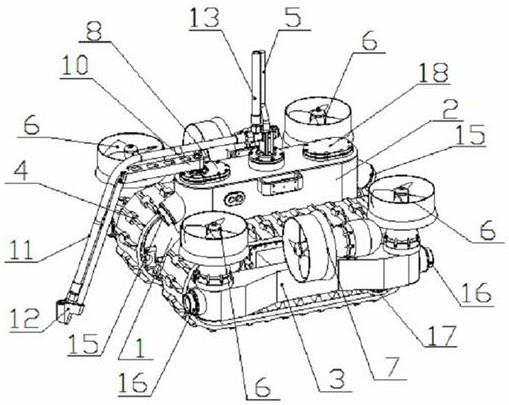
14.图1为本实用新型的立体结构示意图;
15.图2为本实用新型的俯视结构示意图;
16.图3为图2中a-a的剖视结构示意图;
17.图中:1-主舱体,2-副舱体,3-机臂,4-履带行走机构,5-电缆,6-垂直推进器,7-水平推进器,8-清洗密封盖,9-竖轴,10-清洗机械臂,11-供水软管,12-清洗枪头,13-外接高压水软管,14-加强隔板,15-侧部摄像头,16-照明灯,17-底部摄像头,18-备用密封盖。
具体实施方式
18.下面结合附图对本实用新型作进一步的说明,但不以任何方式对本实用新型加以限制,基于本实用新型所作的任何变更或改进,均属于本实用新型的保护范围。
19.如图1~3所示,本实用新型包括水上控制设备和机器人本体,水上控制设备为现有技术,设置在水面上,操作控制人员通过电缆5向水下的机器人本体传输电能、数据和信号,接收水下机器人本体及各仪器的数据和信号,并将其实时显示在水上控制设备上,使得操作控制人员可以实时监控水下无人工程车的工作状态,机器人本体包括主舱体1和安装在主舱体1上方的副舱体2,主舱体1的两侧分别设置有一个机臂3,主舱体1、副舱体2和机臂3均为空腔结构,且各空腔相互连通形成整体密封仓,实际使用时,水下机器人的电气控制元器件和动力驱动部件都集成安装在密封仓的内部,节省空间的同时减少了各个电气元件的密封环节,省去了水下密封布线环节,降低了水下清洗机器人的设计和制造难度,提高了本实用新型在水下作业时的安全性和可靠性,本实用新型在下水前,只需对密封仓内充气,然后放入水中即可检查整体密封性能,保证封闭腔体的密封性能,主舱体1的两侧安装有履带行走机构4,履带行走机构4为现有技术,用于驱动机器人本体在作业面上行走,其驱动装置可安装在密封仓的内部,副舱体2的顶部通过电缆5与水上控制设备连接,每个机臂3的前后两侧各设置有一个可独立变频控制的垂直推进器6,四个垂直推进器6两两对称布置,垂直推进器6的推力方向与履带行走机构4的前进方向垂直,每个机臂3的中部均设置有一个可独立变频控制的水平推进器7,两个水平推进器7对称布置,水平推进器7的推力方向与履带行走机构4的前进方向平行,副舱体2的顶部设置有清洗机构,清洗机构为现有技术,实现
对水下设施的清洗作业。
20.本实用新型取消了普通水下机器人的浮力块,通过最大限度增加主舱体1、副舱体2和机臂3排水量的方法来弥补取消浮力块带来的浮力损失,提高了水下清洗机器人的可靠性;其次,本实用新型将空中多旋翼无人机的工作原理运用到水下清洗机器人上,安装了四个可独立变频控制的垂直推进器6和两个可独立变频控制的水平推进器7,相互配合可使水下清洗机器人实现水下xyz三轴的自由旋转以及水平前行,提高了水下清洗机器人在水下平移的适应性和稳定性;另外,改进了两个水平推进器7的安装位置,将其安装在机臂3的中部,结构更加合理,使得水下清洗机器人在水下的运行和姿态调整更加平稳和顺畅,进而确保本实用新型具有较好的清洗效果。
21.清洗机构包括清洗密封盖8和安装在清洗密封盖8上的竖轴9,清洗密封盖8安装在副舱体2的顶部,竖轴9的下端伸入到副舱体2内后传动连接有能够驱动竖轴9来回转动的驱动机构,竖轴9的上端连接有清洗机械臂10,清洗机械臂10的端部折弯后倾斜朝下布置,清洗机械臂10上设置有供水软管11,供水软管11的下端设置有清洗枪头12,上端与外接高压水软管13连通。驱动机构为现有技术,能够驱动竖轴9来回转动,从而带动清洗机械臂10左右摆动,进而带动供水软管11及清洗枪头12左右摆动,运行时,将外接高压水软管13与高压水系统连通,将电缆5与水上控制设备连接即可对需要清洗的作业面进行清洗,实现水下设施的清洗。
22.主舱体1和副舱体2的内部均设置有加强隔板14,本实用新型用于水下作业,在作业过程中,主舱体1和副舱体2需要承受较大的水压,通过加强隔板14的设置,可以对主舱体1和副舱体2提供支撑,从而提高主舱体1和副舱体2的刚度和强度,防止主舱体1和副舱体2在承受较大水压时产生变形或损坏,延长使用寿命,为了便于电气元件的安装,也为了使得主舱体1和副舱体2能够连成一个整体的密封仓,可在加强隔板14上开孔。
23.副舱体2的前后两端分别设置有一个侧部摄像头15,通过侧部摄像头15可以对水下清洗机器人的航行过程和作业过程进行监控,便于工作人员对工程车的操控,也便于工作人员更加清晰的掌握水下清洗机器人的清洗效果。
24.侧部摄像头15的镜头倾斜朝下布置,在实际使用过程中发现,若是侧部摄像头15的镜头朝向前方,由于清洗面位于水下清洗机器人的下方,不再镜头正中,而是在镜头下侧,加之清洗过程中会导致水浑浊,会对侧部摄像头15形成遮挡,使得操控人员无法看清清洗情况,就会导致侧部摄像头15无法对清洗部位进行有效监测,进而无法精确掌握清洗的效果,因此将侧部摄像头15的镜头倾斜朝下布置,使其朝向清洗枪头12的位置,提高监测效果,在实际使用时,还可以适当加长侧部摄像头15的安装长度,使得侧部摄像头15的镜头离清洗枪头12的距离更近,提高侧部摄像头15监测画面清晰度,进而提高监测效果。
25.每个机臂3的前后两端各设置有一个照明灯16,照明灯16为水下清洗机器人的航行过程和作业过程提供照明,便于工作人员对工程车的操控。
26.机臂3后侧的底部设置有底部摄像头17,底部摄像头17安装在机臂3的底部,用于监控水下清洗机器人下方的情况,便于掌握本装置的运行和作业情况。
27.副舱体2的顶部设置有备用密封盖18,本实用新型为水下清洗机器人,在副舱体2上安装了清洗机构,为了增加本实用新型的适用性和功能性,在副舱体2上设置密封盖18,需要时,可在密封盖18上安装挖掘机构、检修机构、焊接机构等其它功能性机构,完成其它
水下作业。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1