一种用于船舶远程识别与跟踪的船载装置的制作方法
1.本实用新型涉及船舶识别与跟踪技术领域,尤其涉及一种用于船舶远程识别与跟踪的船载装置。
背景技术:
2.为了加强海上安保、保护海洋环境、组织遇险搜寻救助、提升海域感知能力,2006年国际海事组织(international maritime organization)通过了国际海上人命安全公约(international convention for safety of life at sea,简称solas公约)关于建立船舶远程识别与跟踪系统(long range identification and tracking of ships)的修正案。根据修正案的要求,缔约国旗下从事国际航行的客船、300总吨及以上的货船以及移动式近海钻井装置的船舶必须配备符合lrit技术要求的通信导航设备,以实现缔约国对船舶的远程识别与跟踪;同时各缔约国需分别建立lrit国家数据中心,通过卫星通信服务商和应用服务提供商实现对旗下公约船远程动态跟踪,同时需要按照国际数据分发计划(data distribution plan)通过国际数据交换中心(international data exchange)处理其他国家中心以沿岸国、港口国、遇险搜救等各类请求。国际数据分发计划与国际数据交换中心由国际海事组织进行建设管理。lrit系统整体架构如图1所示。
3.国际海事组织为了有效实施lrit系统建设,在solas有关lrit系统的修正案通过后,陆续发布了一系列决议、通函等文件,确立了船载lrit设备、国家数据中心、国际数据交换中心、国际数据分发计划等系统构成模块的详细技术规范与技术要求。
4.我国作为国际海事组织的缔约成员国,有法律义务按照solas公约修正案的相关要求,开展lrit系统建设,以船旗国身份管理旗下公约船的动态位置,并按照沿岸国、港口国、遇险搜寻救助等数据用户(data user)规则处理lrit请求、响应lrit信息。
5.根据solas有关lrit公约的要求,以下三类从事国际航行的船舶须安装符合lrit技术要求的船载装置:客船,包括高速客船;300总吨及以上的货船,包括高速货船;海上移动钻井平台。船载装置应满足的技术及功能要求包括:装置应是一个内置或外置全球导航定位接收机的船载通信设备;装置所使用的通信系统应提供对船舶航行所有洋区的覆盖支持;装置可以按6小时间隔自动向lrit数据中心报告lrit信息;装置报告的lrit信息包括:船舶标识、船舶定位、定位时间;装置支持lrit数据中心远程配置装置的lrit信息报告间隔;装置支持单次寻呼poll指令,即能响应数据中心的单次调取船位指令。
6.目前船舶远程识别与跟踪船载装置主要采用以gps系统作为全球导航定位数据来源、以inmarsat海事卫星或iridium铱星卫星作为全球卫星通信手段,存在的问题主要包括:
7.1、船载装置异常停止报告lrit信息,造成船舶在国外港口滞留、无法通过船旗国无线电检查等问题。正常情况下,船载装置应以6小时间隔向lrit数据中心报告lrit信息(标识、时间、经纬度),但受限于inmarsat海事卫星系统的通信机制,在发生航行洋区切换、并发处理报文通信、lrit终端兼做gmdss或ssas功能等情况下,可能发生船载装置发送数据
报告失败、dnid配置信息丢失、program配置失效等问题,造成船载装置无法正常报告lrit信息,影响船舶的正常经营管理。
8.2、幽灵船异常报位、通信费用结算问题。特殊情况下船舶经营人未提前通知lrit数据中心,而直接通过船载卫星通信设备入网机构办理注销业务,造成装置内存储的dnid、program等资源未被及时回收,最终导致装置持续报位,但数据中心已经无法对注销装置进行远程关闭报位。这就是幽灵船问题。幽灵船问题将直接导致通信资源及通信费用的浪费,干扰对国际航行船舶的远程监管,影响lrit数据中心的正常运行管理。
技术实现要素:
9.本实用新型的目的在于提供一种用于船舶远程识别与跟踪的船载装置,从而解决现有技术中存在的前述问题。
10.为了实现上述目的,本实用新型采用的技术方案如下:
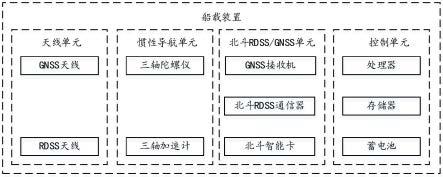
11.一种用于船舶远程识别与跟踪的船载装置,包括天线单元、惯性导航单元、北斗rdss/gnss单元和控制单元;所述天线单元与所述北斗rdss/gnss单元相连,所述北斗rdss/gnss单元和所述惯性导航单元均与所述控制单元相连。
12.优选的,所述天线单元包括gnss天线和rdss天线;所述gnss天线和rdss天线分别与gnss卫星和北斗卫星无线连接;所述北斗卫星经北斗卫星地面总站与lrit数据中心相连。
13.优选的,所述惯性导航单元包括三轴陀螺仪和三轴加速计。
14.优选的,所述北斗rdss/gnss单元包括gnss接收机、北斗rdss通信器、北斗智能卡;所述gnss接收机与所述gnss天线相连,所述北斗rdss通信器与所述rdss天线相连,所述北斗智能卡与所述北斗卫星无线连接。
15.优选的,所述控制单元包括处理器、存储器和蓄电池;所述存储器、蓄电池、三轴陀螺仪、三轴加速计、gnss接收机、北斗rdss通信器以及北斗智能卡均与所述处理器相连。
16.优选的,所述船载装置包括壳体,所述惯性导航单元、北斗rdss/gnss单元和控制单元设置在所述壳体内部,所述天线单元设置在所述壳体外壁上。
17.优选的,所述壳体外壁上设置有电源接口,蓄电池与所述电源接口相连,所述电源接口与外接电源相连。
18.本实用新型的有益效果是:1、通过采取北斗rdss通信器,可以有效提升通信速率,提升监控效率。2、通过利用北斗rdss通信器,可以有效提升通信成功率。3、由于北斗rdss通信器本身的通信机制,lrit数据中心端易于实现对装置的监控、管理,相较传统海事卫星终端有较大优势。4、有效解决现了基于海事卫星通信系统的lrit终端存在的终端报位异常、幽灵船异常等问题,实现lrit数据中心对imo公约船的正常识别与监控,进一步提升船舶位置报告质量,更好满足solas公约的相关要求。
附图说明
19.图1是现有技术中lrit系统的结构示意图;
20.图2是本实用新型实施例中船载装置与lrit数据中心进行数据交互的示意图;
21.图3是本实用新型实施例中船载装置的结构示意图。
具体实施方式
22.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本实用新型,并不用于限定本实用新型。
23.如图2和图3所示,本实施例中提供了一种用于船舶远程识别与跟踪的船载装置,包括天线单元、惯性导航单元、北斗rdss/gnss单元和控制单元;所述天线单元与所述北斗rdss/gnss单元相连,所述北斗rdss/gnss单元和所述惯性导航单元均与所述控制单元相连。
24.本实施例中,所述天线单元包括gnss天线和rdss天线;所述gnss天线和rdss天线分别与gnss卫星和北斗卫星无线连接;所述北斗卫星经北斗卫星地面总站与lrit数据中心相连。
25.所述gnss天线用于接收gnss卫星发射的gnss信号;所述rdss天线用于接收北斗卫星发射的北斗rdss信息,或向北斗卫星发射北斗rdss信息,实现船载装置与lrit数据中心的数据交互。
26.本实施例中,所述惯性导航单元包括三轴陀螺仪和三轴加速计。所述三轴陀螺仪和三轴加速计用于获取船舶的三个方向的角速度,三轴加速计用于获取船舶三个方向的加速度,并将获取的相关数据信息传递给控制单元,控制单元根据这些角速度和加速度信息,利用卡尔曼滤波算法计算出导航信息,保证船舶在无法正常接收gnss信号的情况下,正常为lrit数据中心提供lrit定位信息。
27.本实施例中,所述北斗rdss/gnss单元包括gnss接收机、北斗rdss通信器、北斗智能卡;所述gnss接收机与所述gnss天线相连,所述北斗rdss通信器与所述rdss天线相连。
28.gnss接收机用于通过gnss天线接收gnss卫星发射的gnss信号,向控制单元输出船舶的定位、时间、航向和航速信息。
29.北斗rdss通信器用于接收北斗卫星发射的北斗rdss信息,或向北斗卫星发射北斗rdss信息,实现船载装置与lrit数据中心的数据交互,实现发送北斗短报文、接收短报文和位置报告的功能。
30.所述北斗智能卡与所述北斗卫星无线连接,辅助北斗rdss通信器,实现船载装置与lrit数据中心的数据交互,进而实现船舶的远程识别与跟踪。
31.本实施例中,所述控制单元包括处理器、存储器和蓄电池;所述存储器、蓄电池、三轴陀螺仪、三轴加速计、gnss接收机、北斗rdss通信器以及北斗智能卡均与所述处理器相连。
32.所述处理器可以根据三轴陀螺仪和三轴加速计获取的角速度和加速度信息,利用卡尔曼滤波算法计算出导航信息,保证船舶在无法正常接收gnss信号的情况下,正常为lrit数据中心提供lrit定位信息,实现船舶的远程识别与跟踪。所述存储器用于存储相关的数据信息,便于后期查看审核。
33.处理器中设置有完整的lrit请求接收与处理逻辑。船载装置通过北斗rdss通信器接收来自lrit数据中心的请求指令,能够解析的指令包括:单次呼叫位置指令、设置15分钟定时报告指令、设置30分钟定时报告指令、设置60分钟定时报告指令、设置3小时定时报告指令、设置6小时定时报告指令、设置12小时定时报告指令、设置24小时定时报告指令、关闭
定时报告指令。
34.船载装置收到单次呼叫位置指令后,通过处理器处理相关信息后,经北斗rdss通信器向lrit数据中心返回一次lrit信息。船载装置收到设置定时报告指令后,通过处理器处理相关信息后,经北斗rdss通信器向lrit数据中心定时按照指定间隔返回lrit信息。船载装置收到关闭定时报告指令后,由处理器控制相关部件停止当前有效的定时位置报告。
35.处理器中设置有完整的船载装置报位状态管理逻辑;北斗rdss通信器通过北斗rdss天线接收lrit数据中心发送来开始定时位置报告请求和关闭定时位置报告请求时,根据相关请求实现定时位置报告状态的改变。
36.处理器中设置有完整的lrit信息发送管理逻辑。在船载装置因为lrit数据中心的单次呼叫请求或定时位置报告而触发lrit信息发送功能时,船载装置首先通过gnss接收器获取lrit数据中心发送的请求,成功获取经处理器处理并封装信息后,经北斗rdss通信器或北斗智能卡通过rdss短报文链路向lrit数据中心进行反馈;如果因为gnss接收器获取信息失败,船载装置将通过惯性导航单元,获取并封装lrit信息,再经北斗rdss通信器或北斗智能卡通过rdss短报文链路发送到lrit数据中心;如果惯性导航单元无法获取到lrit信息,船载装置将尝试使用北斗rdss通信器或北斗智能卡获取lrit数据中心发送的请求,成功获取经处理器处理并封装信息后,经北斗rdss通信器或北斗智能卡通过rdss短报文链路向lrit数据中心进行反馈。
37.本实施例中,所述船载装置包括壳体,所述惯性导航单元、北斗rdss/gnss单元和控制单元设置在所述壳体内部,所述天线单元设置在所述壳体外壁上。
38.将相应的器件集成到壳体中,不仅可以保护各个器件不被海水侵蚀而损坏,也能够避免器件在船舶上由于船舶颠簸而造成损坏。
39.本实施例中,所述壳体外壁上设置有电源接口,蓄电池与所述电源接口相连,所述电源接口与外接电源相连。船载装置的正常工作可以由蓄电池进行供电,也可以连接外接电源进行供电。蓄电池的设置能够保证船载装置在外接电源供电不足时,仍然能够正常工作一段时间。
40.通过采用本实用新型公开的上述技术方案,得到了如下有益的效果:
41.本实用新型提供了一种用于船舶远程识别与跟踪的船载装置,船载装置通过采取北斗rdss通信器,可以有效提升通信速率,提升监控效率。船载装置通过利用北斗rdss通信器,可以有效提升通信成功率。船载装置由于北斗rdss通信器本身的通信机制,lrit数据中心端易于实现对装置的监控、管理,相较传统海事卫星终端有较大优势。船载装置有效解决现了基于海事卫星通信系统的lrit终端存在的终端报位异常、幽灵船异常等问题,实现lrit数据中心对imo公约船的正常识别与监控,进一步提升船舶位置报告质量,更好满足solas公约的相关要求。
42.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1