可翻转式四旋翼无人机的制作方法
[0001]
本发明涉及一种可翻转式四旋翼无人机。
背景技术:
[0002]
四旋翼无人机是一种具有四个螺旋桨的无人飞行器,这种无人机根据传感状态通过飞控板输出4路pwm波来控制电子调速器,进而控制无刷电机转动状态,达到飞行目的。由于四旋翼无人机体积小、使用方便,近年来已经广泛应用于军事、摄影、运输、医疗救助、侦查、监测等领域。
[0003]
然而,大多数四旋翼无人机目前的结构不能应用于某些特定的领域,不能实现双面扫描、单翼失灵后迅速恢复飞行等功能,导致其在执行摄影、侦查等任务时可能无法满足使用者的要求,为弥补以上不足,设计一种可翻转式四旋翼无人机,其在机体翻转之后可自行调整无刷电机转轴的方向,保证飞行器在翻转状态下正常飞行;且当无人机某一机翼失灵时,其可通过一对对角螺旋桨略倾斜角度以保证其动量矩平衡,使其能继续正常飞行,这一创新性设计使无人机可靠性提高,使其能在复杂环境中稳定飞行,大幅度增强无人机的实用价值。
技术实现要素:
[0004]
本发明的目的在于克服现有技术的缺点与不足,提供一种可翻转式的无人机,该装置通过加装可翻转模块,使无人机既能正向飞行,也可在空中翻转后飞行,能大幅度提升其机动性。
[0005]
本发明的技术方案是:一种可翻转式四旋翼无人机,主要由机体、可翻转装置和动力模块组成,可翻转装置安装在机体上并与动力模块相连。动力模块包括:螺旋桨、无刷电机、电子调速器;螺旋桨安装在无刷电机的转轴上,无刷电机的底部与可翻转装置的连接块相连。可翻转装置包括连接块、舵机、轴承;连接块右端的平面与舵机转轴通过轴承连接,连接块的底座与无刷电机相连,连接块下部突出部分用于和无刷电机平衡,舵机的转动通过连接块带动无刷电机绕其转轴转动。机体主要包括:中心云台、机臂;四个机臂上分别搭载着舵机与电子调速器,并使无刷电机与可翻转装置对称分布。
[0006]
其中,所述可翻转装置的连接块有螺丝孔,将无刷电机通过螺丝固定在连接块的上端,连接块末端连接防撞网,防撞网呈扇形,其大小比螺旋桨略大,连接块的右端有一圆形平面,圆形平面上安装有一轴承,轴承外圈与机臂刚性连接,轴承内圈与舵机相连,舵机负责可翻转装置的翻转,机臂负责承重。
[0007]
所述机体中的中心云台与机臂紧密连接,机体的中心云台四周有全保护,用以保证中心云台内部其他元件正常工作。
[0008]
具体工作方式是:当无人机正向飞行时,中心云台给四个舵机发出信号,舵机保持无刷电机和螺旋桨垂直于机体平面向上,且保持不动,同时中心云台给四个电子调速器也发出信号,四个螺旋桨同时开始旋转,产生向上的升力,由于对角螺旋桨旋转方向一致,而
相邻旋转方向不同,产生的扭矩也互相抵消,当产生的升力大于重力时,无人机垂直上升,当产生的升力小于重力时,无人机垂直下降,当升力与无人机重力相等时,无人机悬停。
[0009]
当无人机偏航时,可采用两种方式,第一种是普通无人机的偏航方式,第二种是可翻转式无人机特有的方式,中心云台给一对对角舵机发出信号,使两个舵机向相反方向有一个小角度的偏转,使无人机有一个偏航的力矩,当完成偏航时,中心云台再给舵机发出信号,使舵机垂直机体平面向上。
[0010]
可以将无人机翻转后再飞,首先中心云台给一侧两个螺旋桨发出信号,使这两个螺旋桨相同幅度地增大转速,中心云台给另一侧两个螺旋桨发出不同信号,使这两个螺旋桨相同幅度的减小转速,确保四个螺旋桨产生的扭矩可以相互抵消,增大螺旋桨转速那一侧高度升高,减小螺旋桨转速那一侧高度降低,无人机开始横滚,根据中心云台中的加速度传感器读取到的z轴加速度来判断无人机在旋转过程中的状态,无人机旋转即将达到180度时,z轴的加速度达到某一阈值,此时中心云台给四个舵机发出信号,舵机转动,带动连接块转动,继而带动轴承的内圈转动,轴承外圈保持不动,与连接块相连的防撞网和无刷电机转动,根据传感器的参数,在保证飞行器正常飞行下,舵机缓慢转动,最终状态相比于起始状态旋转180度,在舵机完成旋转后,保持舵机不动,无刷电机与螺旋桨都垂直于机体平面向上保持不动,中心云台根据传感器的数值来获得无人机此时的状态,根据此时的状态调整四个螺旋桨的转速,使机体逐渐水平,待机体稳定后中心云台改变给四个螺旋桨的信号,使四个螺旋桨的转速保持相同,无人机翻转前的下隔板翻转后朝向上方,翻转前的上隔板翻转后朝向下方,无人机完成翻转的动作。
[0011]
无人机翻转后原来中心云台朝上的一面变为朝向下方,可获得更广阔的操作范围,且无人机机体内部各元件均固定牢固,不会因为无人机的上下翻转而影响其正常工作。无人机的螺旋桨将要与障碍物相撞时,位于其下方的防撞网会先与障碍物接触,保护了螺旋桨和障碍物,防撞网可随可翻转装置翻转,翻转后也可保护螺旋桨和障碍物。
[0012]
当无人机在飞行过程中,如果其中一个螺旋桨失灵,中心云台根据传感器的数据判断出无法正常工作的无刷电机,再给失灵螺旋桨的对角螺旋桨对应的电子调速器发出信号,使其停转,同时给正常工作的一对对角无刷电机对应的电子调速器发出信号,使无刷电机增大转速,保持向上的升力等于重力,同时中心云台给这一对无刷电机对应的舵机发出信号,使两个舵机向向反方向做一个小角度的偏转,从而抵消了由于螺旋桨旋转产生的扭矩,这样可以有效防止其中一螺旋桨失灵导致的的无人机坠毁。
[0013]
本发明的有益效果是:本发明相比于大多数的四旋翼无人机,加装了可翻转装置,可在机体翻转之后自行调整螺旋桨方向,保证飞行器正常飞行,且可在无人机其中一个螺旋桨失灵后继续稳定飞行,使无人机可靠性提高,能够执行更加复杂的任务,增强了无人机的机动性能,大幅增强无人机的实用价值。
附图说明
[0014]
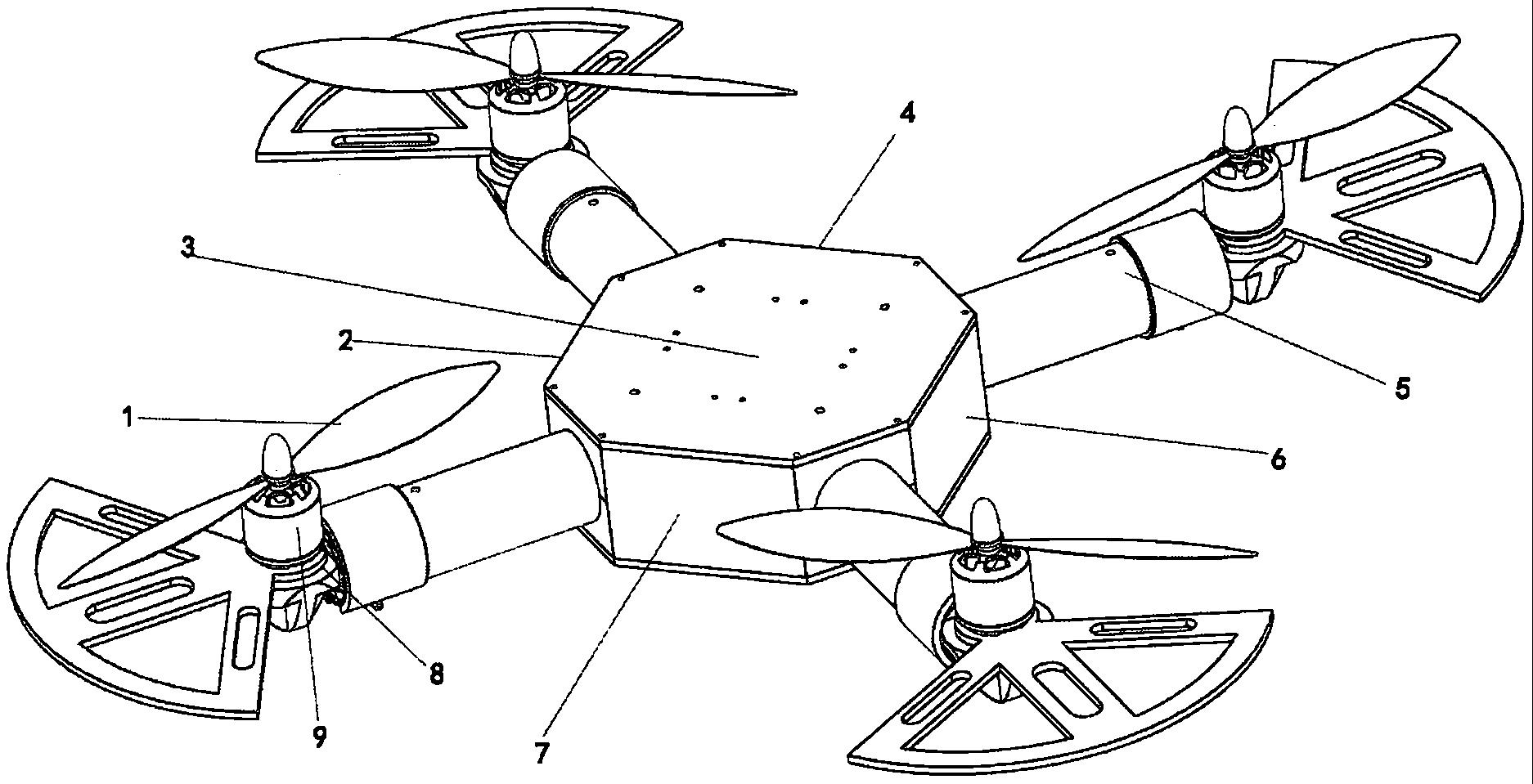
图1为可翻转式四旋翼无人机翻转前的立体图。
[0015]
图2为图1所示无人机中的动力系统与可翻转装置的俯视图。
[0016]
图3为图2所示动力系统与可翻转装置的仰视图。
[0017]
图4为可翻转式四旋翼无人机翻转后的立体图。
[0018]
图5为图1所示无人机中舵机与机臂的组装示意图。
[0019]
图6为图1所示无人机中连接块与轴承的组装示意图。
具体实施方式
[0020]
下面结合附图本发明的具体结构作进一步说明。
[0021]
图中,1-螺旋桨,2-左隔板,3-上隔板,4-后隔板,5-机臂,6-右隔板,7-前隔板,8-可翻转装置,9-无刷电机,10-防撞网,11-连接块,12-轴承,13-圆柱头螺丝,14-下隔板,15-舵机。
[0022]
当无人机正向飞行时,中心云台给四个舵机15发出信号,舵机15保持无刷电机9和螺旋桨1垂直于机体平面向上,且保持不动,同时中心云台给四个电子调速器也发出信号,四个螺旋桨1同时开始旋转,产生向上的升力,由于对角螺旋桨1旋转方向一致,而相邻螺旋桨1旋转方向不同,产生的扭矩也互相抵消,当产生的升力大于重力时,无人机垂直上升,当产生的升力小于重力时,无人机垂直下降,当升力与无人机重力相等时,无人机悬停。
[0023]
当无人机偏航时,可采用两种方式,第一种是普通无人机的偏航方式,第二种是可翻转式无人机特有的方式,中心云台给一对对角舵机15发出信号,使两个舵机15向相反方向有一个小角度的偏转,使无人机有一个偏航的力矩,当完成偏航时,中心云台再给舵机15发出信号,使舵机15垂直机体平面向上。
[0024]
可以将无人机翻转后再飞,首先中心云台给一侧两个螺旋桨发出信号,使这两个螺旋桨相同幅度的增大转速,中心云台给另一侧两个螺旋桨发出不同信号,使这两个螺旋桨相同幅度的减小转速,确保四个螺旋桨1产生的扭矩可以相互抵消,增大螺旋桨转速那一侧高度升高,减小螺旋桨转速那一侧高度降低,无人机开始旋转,根据中心云台中的加速度传感器读取到的z轴加速度来判断无人机旋转过程中的状态,无人机旋转即将达到180度时,z轴的加速度到达某一数值,中心云台给四个舵机15发出信号,舵机15转动,带动连接块11转动,继而带动轴承12的内圈转动,轴承12的外圈保持不动,与连接块相连的防撞网10与无刷电机9转动,根据传感器的参数,在保证飞行器正常飞行下,舵机15缓慢转动,最终状态相比于起始状态旋转180度,在舵机15完成旋转后,保持舵机15不动,无刷电机9与螺旋桨1都垂直于机体向上保持不动,中心云台根据传感器的数值来获得无人机此时的状态,根据此时的状态调整四个螺旋桨1的转速,使机体逐渐水平,待机体稳定后,中心云台改变给四个螺旋桨1的信号,使四个螺旋桨1的转速保持相同,无人机翻转前的下隔板翻转后朝向上方,翻转前的上隔板翻转后朝向下方,无人机完成翻转。
[0025]
无人机将原来中心云台朝上的一面变为朝向下方,可获得更广阔的操作范围,且无人机机体内部各元件均固定牢固,不会因为无人机的上下翻转而影响其正常工作。无人机的螺旋桨1将要与障碍物相撞时,位于其下方的防撞网10会先与障碍物接触,保护了螺旋桨1和障碍物,防撞网可随可翻转装置8翻转,翻转后也可保护螺旋桨1和障碍物。
[0026]
当无人机在飞行过程中,如果其中一个螺旋桨1失灵,中心云台根据传感器的数据判断出无法正常工作的无刷电机9,再给失灵螺旋桨的对角螺旋桨对应的电子调速器发出信号,使其停转,同时给正常工作的一对对角无刷电机9对应的电子调速器发出信号,使无刷电机9增大转速,保持向上的升力等于重力,同时中心云台给这一对无刷电机9对应的舵机15发出信号,使两个舵机15向向反方向做一个小角度的偏转,从而抵消了由于螺旋桨1旋
转产生的扭矩,这样可以有效防止其中一螺旋桨1失灵导致的的无人机坠毁。
[0027]
本发明实现了四旋翼无人机的翻转,增强了四旋翼无人机的机动性能,使无人机可执行任务的复杂程度大大提高,通过向普通四旋翼无人机加装可翻转装置,使无人机可以翻转后飞行,且可在无人机其中一个螺旋桨失灵后继续稳定飞行,大大提高了其实用价值。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1