一种单兵轻小型航测无人机及单兵轻小型航测无人机系统的制作方法
1.本实用新型涉及航测无人机领域,特别涉及一种单兵轻小型航测无人机及单兵轻小型航测无人机系统。
背景技术:
2.当前,使用无人机进行航测作业的产品中,主要为全包型大型无人机。无人机轴距均在1米以上,一般采用碳钎维一体成型技术,上部机身是采用碳钎维制成,在机舱内安装电子设备;动力臂与机身通过旋转法兰连接;下部安装吊舱;起落架一般为两脚分开式。通讯方面,此无人机需要笔记本电脑、遥控器、外置数传、外置数传天线(部分)进行地面通信。
3.目前全包型大型无人机在航测作业领域,主要有以下几个缺点:
4.1、外出作业繁重:机身尺寸过大,一般轴距都在1米
‑
2米,大尺寸机身使得运输、装卸非常繁重,往往需要大型的航空铝箱包装,并且需要至少3 人的队伍才能外出作业;
5.2、作业效率低:由于此类大型全包无人机飞行速度仅能保持在5m/s左右,在同样航时的条件下,其飞行航程短,作业效率低;
6.3、安装繁杂:此类无人机往往不可折叠,采用拆卸式收纳方式,因此在从包装拿出无人机后,还需要进行复杂的安装工作才能开始作业,这个过程一般需要2
‑
3人,时间为15分钟左右,且在任务过程中需要转场的话,依然需要再次进行拆装,用户体验极差;
7.4、通信系统复杂:此类无人机在飞行过程中,往往需要地面笔记本电脑、遥控器、外置数传模块与天线与飞机进行通信,此系统操作起来极为复杂,需要2
‑
3人的配合才可完成监控与通信,并且使用笔记本电脑进行通信,还收到笔记本电脑的兼容性差、续航性能差等问题的影响,非常影响航测作业;
8.5、航时短:此类无人机虽然可携带大容量电池,但本身机身重量大,因此飞行时间也大大受影响,一般均在30分钟左右;
9.6、维修昂贵:此类无人机由于是一体成型,一旦出现任何损伤,均需要全部更换,导致售后维修成本高昂,售后周期久。
技术实现要素:
10.为此,需要提供一种单兵轻小型航测无人机及单兵轻小型航测无人机系统,用于解决现有航测无人机体型大,重量大,需要多人配合操作,工作效率低的技术问题。
11.为实现上述目的,发明人提供了一种单兵轻小型航测无人机,包括机身主体、动力臂组件、电源组件和快拆挂载结构;
12.所述机身主体包括中心电路板、上盖板、下盖板和侧板组件,所述侧板组件连接在上盖板和下盖板之间,所述上盖板、下盖板和侧板组件围成一个用于容纳中心电路板的空腔;
13.所述电池组件连接上盖板上方,所述电池组件与中心电路板电连接;
14.所述动力臂组件包括四个动力臂、四动力臂对称连接在机身主体上;所述动力臂
与中心电路板电连接
15.所述快拆挂载结构连接在下盖板底部,所述快拆挂载结构用于搭载航测相机。
16.作为本实用新型的一种优选结构,所述单兵轻小型航测无人机还包括电池盖和插销,所述电池盖连接在上盖板上,所述电池盖底部前侧设有前卡位,所述电池盖底部后侧设有后卡位,所述上盖板上设有台阶螺丝,所述前卡位和后卡位与台阶螺丝相适配,所述电池盖和上盖板上设有插销孔,所述插销与电池盖和上盖板上插销孔的插销孔相适配。
17.作为本实用新型的一种优选结构,所述单兵轻小型航测无人机还包括散热系统,所述散热系统包括进风口和散热风扇,所述进风口设置在侧板组件上,所述散热风扇安装在机身主体尾部。
18.作为本实用新型的一种优选结构,所述动力臂包括折叠件、螺旋桨、电机、起落架和机臂,所述动力臂通过折叠件连接在机身主体上,所述电机与机臂相连接,所述螺旋桨与电机传动连接,所述起落架连接在机臂的底部。
19.作为本实用新型的一种优选结构,所述单兵轻小型航测无人机还包括避障与fpv系统,所述避障与fpv系统集成中心电路板前侧,所述避障与fpv 系统的避障传感器安装在技术主体前部,所述避障与fpv系统的摄像头安装在机身下盖板底部前侧。
20.作为本实用新型的一种优选结构,所述单兵轻小型航测无人机还包括gps 与ppk系统,所述gps与ppk系统包括gps支架、gps与磁罗盘模块、ppk支架、ppk电路板、ppk天线组成,gps支架与ppk支架分别连接在上盖板中部两侧,所述gps与磁罗盘模块连接在gps支架上,所述ppk电路板连接在ppk 支架上。所述ppk天线连接在ppk电路板上。
21.作为本实用新型的一种优选结构,所述快拆挂载结构为增稳板,所述下盖板底部设有快拆螺丝孔,所述增稳板通过短铝柱连接在快拆螺丝孔上。
22.作为本实用新型的一种优选结构,所述侧板组件包括2块前侧板、2块中侧板、2块后侧板、1块机头侧板、1块机尾侧板,所述上盖板和下盖板为菱形形状,所述机头侧板为梯形,卡接在机身主体前侧,所述机尾侧板卡接在机身主体后侧,所述2块前侧板、2块中侧板和2块后侧板卡接在机身主体两侧。
23.区别于现有技术,上述技术方案一种单兵轻小型航测无人机,机身主体由上盖板、下盖板和侧板组件拼接而成,方便拆卸,中心电路板上安装在上盖板、下盖板和侧板组件围成一个用于容纳中心电路板的空腔内,电源组件则安装在上盖板上方,使得整个航测无人机结构紧密,通过大量结构优化与高度集成,将无人机的尺寸和轴距减小,无论是包装、运输还是实际作业时,均可由一人完成,大大提高使用时的便捷性与灵活性。
24.为实现上述目的,发明人还提供了一种单兵轻小型航测无人机系统,一种单兵轻小型航测无人机系统,其特征在于:包括地面站系统和上述的一种单兵轻小型航测无人机,所述地面站系统与单兵轻小型航测无人机通信连接。
25.作为本实用新型的一种优选结构,其特征在于:所述地面站系统包括壳体、面板、把手、天线和拓展背包,所述面板、把手、天线和拓展背包集成在壳体上。
26.区别于现有技术,上述技术方案提供了一种单兵轻小型航测无人机系统,通过高度集成的地面站系统,免去了用户准备笔记本电脑、连接地面收发模块、布置天线等繁复的动作,实现了即拿即用,大大提升了易用性。
附图说明
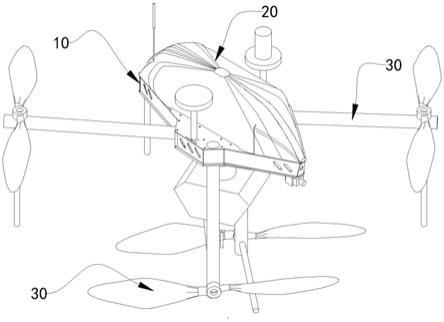
27.图1为具体实施方式所述单兵轻小型航测无人机收起两个动力臂时的三维视图;
28.图2为具体实施方式所述单兵轻小型航测无人机收起两个动力臂时的俯视图;
29.图3为具体实施方式所述单兵轻小型航测无人机收起两个动力臂时的正视图;
30.图4为具体实施方式所述单兵轻小型航测无人机机身主体的三维视图;
31.图5为具体实施方式所述单兵轻小型航测无人机机身主体的后视图;
32.图6为具体实施方式所述单兵轻小型航测无人机机动力臂结构示意图;
33.图7为具体实施方式所述单兵轻小型航测无人机快拆挂载结构为增稳板时的正视图;
34.图8为具体实施方式所述单兵轻小型航测无人机快拆挂载结构为硬挂板时的正视图;
35.图9为具体实施方式所述单兵轻小型航测无人机电池盖的三维视图;
36.图10为具体实施方式所述单兵轻小型航测无人机电池盖的俯视图;
37.图11为具体实施方式所述单兵轻小型航测无人机散热系统在侧板组件上的分布视图;
38.图12为具体实施方式所述单兵轻小型航测无人机系统的地面站系统的三维视图;
39.图13为具体实施方式所述单兵轻小型航测无人机系统的地面站系统的正视图;
40.图14为具体实施方式所述单兵轻小型航测无人机系统的地面站系统的俯视图;
41.图15为具体实施方式所述单兵轻小型航测无人机系统的地面站系统的后视图。
42.附图标记说明:
43.10、机身主体;
44.11、上盖板;12、下盖板;131、机头侧板;132、前侧板;133、中侧板;134、后侧板;135、机尾侧板;
45.20、电源组件;
46.30、动力臂及起落架结构;
47.31、折叠件;32、螺旋桨;33、电机;34、起落架;35、机臂;
48.41、避障传感器;42、fpv摄像头;
49.51、ppk支架;52、ppk电路板;53、ppk天线;54、gps支架;55、 gps与磁罗盘模块;
50.61、增稳板;62、硬挂板;63、相机;64、短铝柱;65、长铝柱;
51.71、散热风扇;72、进风口;
52.81、电池盖;811、前卡位;812、后卡位;813、插销孔;
53.90、地面站系统;
54.91、壳体;911、充电口;912、usb数据口;913、充电指示灯、92、面板;921、摇杆;922、纽子开关;923、电源开关;924、拍照按钮;925、支架;926、电源指示灯;93、把手;931、把手支架;94、平板或者手机;95、拓展背包;96、天线。
具体实施方式
55.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
56.在本申请的描述中,除非另有明确的规定和限定,术语“第一”、“第二”、仅用于描述的目的,而不能理解为指示或暗示相对重要性;除非另有规定或说明,术语“多个”是指两个或两个以上;术语“连接”、“固定”等均应做广义理解,例如,“连接”可以是固定连接,也可以是可拆卸连接,或一体地连接,或电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
57.本说明书的描述中,需要理解的是,本申请实施例所描述的“上”、“下”、“左”、“右”等方位词是以附图所示的角度来进行描述的,不应理解为对本申请实施例的限定。此外,在上下文中,还需要理解的是,当提到一个元件连接在另一个元件“上”或者“下”时,其不仅能够直接连接在另一个元件“上”或者“下”,也可以通过中间元件间接连接在另一个元件“上”或者“下”。
58.请参阅图1至图12,本实施例涉及一种单兵轻小型航测无人机,如图1 至图3所示,包括机身主体10、中心电路板、动力臂组件、电源组件20、避障与fpv系统、gps与ppk系统和快拆挂载结构。
59.如图4和图5所示,机身主体10包括上盖板11、下盖板12和侧板组件,侧板组件连接在上盖板11和下盖板12之间,上盖板11、下盖板12和侧板组件围成一个用于容纳中心电路板的空腔;中心电路板连接在上盖板11、下盖板12和侧板组件围成的空腔内,避障与fpv系统、gps与ppk系统集成在中心电路板上;电池组件连接上盖板11上方,电池组件与中心电路板电连接;动力臂组件包括四个动力臂、四动力臂对称连接在机身主体10上;动力臂与中心电路板电连接,快拆挂载结构连接在下盖板12底部,快拆挂载结构用于搭载航测相机63。
60.机身主体10结构为无人机主要受力与安装结构,其整体成菱形流线结构,可有效降低风阻、节省空间,并且在机身主体10结构上,通过快速安装位,可以将无人机的折叠结构、动力臂及起落架结构30、电池盖81结构、散热系统、避障与fpv系统、gps与ppk系统、快拆挂载结构均集成在主体结构上,大大提升结构强度并减轻重量。机身主体10结构主要由1块机身上盖板11、 1块机身下盖板12、1块中心电路板、2块前侧板132、2块中侧板133、2块后侧板134构成、1块机头侧板131、1块机尾侧板135,通过螺丝与卡槽连接。
61.机身上盖板11:为碳纤维板材料,数量1块,在整体最上方,菱形形状,机头位置较尖,机尾位置较钝,在上盖板11集成了gps/ppk系统安装位、电池盖81结构安装位、动力臂安装位、折叠结构安装位、避障系统安装位,同时也是电池安装的位置。
62.机身下盖板12:为碳纤维板材料,数量1块,在整体最下方,菱形形状,机头位置较尖,机尾位置较钝,在下盖板12集成了折叠结构安装位、动力臂安装位、避障系统安装位、图传系统安装位、快拆挂载结构安装位,并且新增其他结构时,可直接在下盖板12新增孔位提供结构安装位。
63.中心电路板:为pcb线路板,数量1块,在整体中间,菱形形状,集成了飞控、gps、ppk、电源、4g通信、数传图传等电子模块,是无人机的电子电路中心。设计在机身中部并高度集成,可以有效节省空间,提高稳定性。
64.前侧板132:为碳纤维材料,数量2块,在整体前方两侧,矩形形状,有散热透气孔。2块前侧板132为三角形排布,在飞行过程中可降低阻力。
65.中侧板133:为碳纤维材料,数量2块,在整体中间两侧,矩形形状,左右对称排布。
66.后侧板134:为碳纤维材料,数量2块,在整体后方,矩形形状,有散热透气孔。2块后侧板134呈倒三角排布,可保证飞机即使在倒飞的时候风阻系数依然很小。
67.头侧板:为碳纤维材料,数量1块,在整体最前方,梯形形状,有集成孔位,集成摄像头、超声波等传感器。
68.后侧板134:为碳纤维材料,数量1块,在整体最前方,矩形形状,集成散热风扇71。
69.机身上盖板11与机身下盖板12通过铝柱与螺丝连接,1块中心电路板、 2块前侧板132、2块中侧板133、2块后侧板134构成、1块机头侧板131、1 块机尾侧板135通过卡槽与机身上下盖板12连接。
70.对于小型无人机,可折叠设计能大大提升使用便捷性。折叠结构安装在右前、左后两根机臂35上,通过向下折叠90度的方式,达到机身最小化,并且能在短时间内快速安装,操作简单。通过折叠,无人机从方形变为长条形,可使得无人机体积大大减小,方便运输与安装。
71.本实施例无人机采用“x”形动力臂设计,受力最为均匀,结构强度也是最大的。如图6所示,动力臂及起落架结构30由折叠件31、螺旋桨32、电机33、起落架34、机臂35组成。
72.折叠件31:数量4个,由铝合金cnc加工而成,作用是连接动力臂与机身主体10,并且可实现折叠功能。
73.螺旋桨32:数量4个,由碳纤维一体成型加工而成,作用是提供升力,与电机33通过快拆件相连。
74.电机33:数量4个,作用是提供无人机动力,与机臂35和螺旋桨32相连。
75.机臂35:数量4个,呈”x”形状交叉排布,由碳管制成,作用是传输动力。
76.起落架34:数量4个,由碳纤维一体成型加工而成,作用是提供无人机的支撑,其与机臂35、电机33通过长螺栓连接到一起,形成整体。相比于交叉型的起落架34,本设计结构强度高,且不遮挡挂载。
77.如图1至图3所示,避障与fpv系统集成在无人机头部位置,其中避障传感器41(视觉摄像头、超声波、毫米波雷达等)安装在机身头部,探头部分通过机头侧板131的孔伸出来;fpv摄像头42安装在机身下盖板12近机头处,提供图像实时回传功能,可调整摄像头角度。此处也可悬挂光学吊舱,实现监控功能。
78.如图1至图3所示,gps/ppk系统是飞机导航、定位、指向的系统。在整体上,gps与ppk分布在机身中间两侧,左侧为ppk,右侧为gps,既节省了空间,又保证信号互不干扰。其由gps支架54、gps与磁罗盘模块55、ppk 支架51、ppk电路板52、ppk天线53组成。
79.gps支架54:gps支架54为铝合金cnc加工而成,采用圆柱与金属托盘的结构,下方通过螺丝与机身上盖板11连接,上方为圆形平台,方便布置其他模块。
80.gps与磁罗盘模块55:此为无人机核心传感器,将gps接收机与磁罗盘集成为一体,放置在gps支架54上,可牢牢固定,保证飞机大角度运动时不受影响。
81.ppk支架51:ppk支架51为铝合金cnc加工而成,采用圆柱与金属托盘的结构,下方通过螺丝与机身上盖板11连接,上方为圆形平台,不仅方便安装与维护,同时能够大大减少ppk模块与天线的距离,保证其信号的优良性。
82.ppk电路板52:其通过螺丝牢牢固定在ppk支架51上,提供高精度定位信息。
83.ppk天线53:通过螺旋与ppk电路板52相连,用于接收信号。
84.快拆挂载结构分为增稳板61和硬挂板62。
85.如图7所示增稳板61:机身下盖板12上有4个螺丝孔位,通过螺丝孔位连接4根短铝柱64,可形成4个快拆螺丝孔。增稳云台通过这4个螺丝孔连接住,即实现安装,增稳云台下方可挂载不同相机63,实现不同作业任务。
86.如图8所示硬挂板62:机身下盖板12上有4个螺丝孔位,通过螺丝孔位连接4根长铝柱65,在长铝柱65下方安装一个挂载板,上方可安装不同相机 63实现不同作业任务。通过选择安装增稳板61或者硬挂板62,来适配不同的搭载相机63。
87.上述实施例所述的单兵轻小型航测无人机,机身主体10由上盖板11、下盖板12和侧板组件拼接而成,方便拆卸,避障与fpv系统、gps与ppk系统集成在中心电路板上,中心电路板上安装在上盖板11、下盖板12和侧板组件围成一个用于容纳中心电路板的空腔内,电源组件20则安装在上盖板11上方,使得整个航测无人机结构紧密,通过大量结构优化与高度集成,将无人机的尺寸和轴距减小,无论是包装、运输还是实际作业时,均可由一人完成,大大提高使用时的便捷性与灵活性。
88.进一步地,如图9和图10所示,单兵轻小型航测无人机还包括电池盖81 和插销,电池盖81呈流线型,电池盖81连接在上盖板11上,电池盖81底部前侧设有前卡位811,电池盖81底部后侧设有后卡位812,上盖板11上设有台阶螺丝,前卡位811和后卡位812与台阶螺丝相适配,电池盖81和上盖板11上设有插销孔813,插销与电池盖81和上盖板11上插销孔813的插销孔813相适配。
89.电池盖81是飞机最明显的外观与结构件,由玻璃纤维或碳纤维一体成型制作而成,作用是盖住无人机电池,并减小阻力。其整体呈流线型,与上盖板11完美吻合。其底部有前卡位811、后卡位812,通过与上盖板11上的台阶螺丝配合来连接定位,同时使用插销来防止脱离。安装时,仅需将电池盖 81贴住上盖板11,从前往后滑动,直至插销完全扣入插销孔813即可;脱离时,将插销往下拔,从后往前推,即可脱离,拆装方便。
90.进一步地,本产品设计由于高度集成,散热系统非常关键。散热系统主要由进风口72和散热风扇71组成。如图11所示:
91.进风口72:进风口72分布在前侧板132、中间侧板及后侧板134上,在飞行过程中,气流会被压缩进入进风口72,冷空气进入机身内部进行降温,再排出,达到散热的目的。
92.散热风扇71:安装在机尾侧板135上,将无人机内部的热气流从后方排出无人机。
93.在另一些实施例中,涉及一种单兵轻小型航测无人机系统,包括地面站系统和上述的一种单兵轻小型航测无人机,地面站系统与单兵轻小型航测无人机通信连接。
94.如图12至15所示,地面站系统90包括壳体91、面板92、摇杆921、纽子开关922、把手支架931、把手93、平板或者手机94支架925、天线96、电源开关923、拍照按钮924、电源指示灯926、usb数据口912、充电指示灯 913、充电口911和拓展背包95,面板92、摇杆921、纽子开关922、把手支架931、把手93、平板或者手机94支架925、天线96、电源开关923、拍照按钮924、电源指示灯926、usb数据口912、充电指示灯913、充电口911和拓展背包95集成在壳体91上。
95.地面站系统是无人机地面端重要的设备,承担监控信息、遥控无人机、发送指令等关键任务,集成了遥控器、数传、图传、地面站规划等功能。其主要由壳体91、面板92、摇杆921、纽子开关922、把手支架931、把手93、平板/手机支架925、平板/手机、天线96、电源开关
923、拍照按钮924、电源指示灯926、usb数据口912、充电指示灯913、充电口911、拓展背包95 组成。
96.壳体91:壳体91由铝合金cnc一体成型加工,结构强度高,可抵抗一般摔落。其是整个地面站系统的主体,内部放置电子模块。
97.面板92:面板92分为碳纤维板材质和铝合金材质,其镶嵌在壳体91上方,并通过四角的螺丝固定。
98.摇杆921:摇杆921数量为2套,左右通过螺丝安装在壳体91上,并通过面板92伸出,其作用是控制无人机运动。
99.纽子开关922:摇杆921数量为2套,左右通过螺丝安装在壳体91上,并通过面板92伸出,其作用是控制无人机飞行模式及返航。
100.把手支架931:为铝合金cnc一体成型加工,数量为2,左右通过螺丝安装在壳体91背面,其作用是安装把手93。
101.把手93:为碳纤维材质,通过镶嵌进入两边的把手支架931进行安装。
102.平板/手机支架925:为铝合金cnc一体成型加工,通过螺丝安装在壳体 91上,并通过面板92伸出,其目的是为了固定平板/手机,并且可实现角度调节。
103.平板/手机:在其上安装app,实现无人机的操作。其安装在平板/手机支架925上,并通过平板夹固定。
104.天线96:数量为2,通过左右分布,使得信号接收更为灵敏,通过螺旋头安装在壳体91上。
105.电源开关923:其安装在面板92上,作用是开启/关闭地面站电源。
106.拍照按钮924:其安装在面板92上,其作用是触发拍照。
107.电源指示灯926:其安装在面板92上,通过4个指示灯指示地面站电量。
108.usb数据口912:安装在壳体91上方,作用是通过usb传输数据。
109.充电指示灯913:安装在壳体91上方,作用是充电时指示状态。
110.充电口911:安装在壳体91上方,作用是使用dc头进行地面站充电。
111.拓展背包95:为铝合金cnc一体成型加工,安装在壳体91背面,其作用是在地面站需要拓展功能时,可提供空间。
112.通过高度集成的地面站系统,免去了用户准备笔记本电脑、连接地面收发模块、布置天线等繁复的动作,实现了即拿即用,大大提升了易用性。
113.本发明其主要有益作用如下:
114.1、可实现单兵作业:通过大量结构优化与高度集成,将无人机的尺寸做到700mm轴距,是目前长航时、高精度航测无人机中最为轻小的产品之一。在此基础上,无论是包装、运输还是实际作业时,均可由一人完成,大大提高使用时的便捷性与灵活性。
115.2、作业效率高:通过低阻力机头、流线型电池盖81、整体轻量化与高强度机身等先进设计,使得本发明的无人机可在12m/s的高速巡航状态下保持 60分钟的航时,巡航里程更是突破了30公里,相比传统的航测无人机,作业效率提升了5倍。
116.3、安装快捷:本发明的无人机仅需两根机臂35折叠,从包装中取出直至开始任务,仅需30秒,大大提高了初始准备的简易性,在任务转场等情形下优势明显。
117.4、高度易用性:通过高度集成的地面站系统,免去了用户准备笔记本电脑、连接地
面收发模块、布置天线等繁复的动作,实现了即拿即用,大大提升了易用性。
118.5、稳定可靠:通过“x”型动力臂设计、大量结构强化与电子电路集成,本发明的无人机可实现全天候高强度作业,在大风等恶劣环境下依然可以保持飞行安全。
119.6、售后维修便捷:本发明的无人机基础材料易得,且通过模块化设计,一旦出现问题需要更换或维护时,仅需更换该模块即可,售后成本大幅降低。
120.7、拓展功能丰富:通过快拆挂载结构设计、4边分散式起落架34设计,能够方便快捷的更换挂载,且机身下部空间与视野广阔,不会产生起落架34 遮挡等问题,实现“一机多用”,大大增加无人机的拓展功能。
121.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型专利的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1