多工位电芯传送机构的制作方法
1.本实用新型涉及电芯生产加工技术领域,特别是涉及一种多工位电芯传送机构。
背景技术:
2.随着5g技术的不断发展及完善,日常生活中的蓝牙耳机、智能手表、运动手环及etc等电动工具的需求也越来越大,而为了适应5g技术的应用,电动工具中的移动终端电池电芯的生产加工变得尤为重要。
3.在现有的电芯生产加工中,需要对电芯进行整形、焊接、检测等生产加工,而电芯在上一个工位完成加工操作后,需要将电芯搬运至下一工位进行生产加工。然而,现有的电芯转移一般采用单工位的搬运结构进行加工,如此,不但使得生产效率不高,而且需要在相邻工位之间设置对应的搬运机构,从而使得整体结构庞杂、占用空间大,由此导致生产成本提高。
技术实现要素:
4.本实用新型的目的是克服现有技术中的不足之处,提供一种结构较为简单紧凑,且能够同时对多个电芯进行搬运转移,使得整体生产效率得到提高的多工位电芯传送机构。
5.本实用新型的目的是通过以下技术方案来实现的:
6.一种多工位电芯传送机构,包括:
7.移动模组,所述移动模组包括导向件、位移驱动件及多个滑动件,各所述滑动件滑动设置于所述导向件上,所述位移驱动件分别与各所述滑动件连接;及
8.多个电芯取料模组,各所述电芯取料模组一一对应设置于各所述滑动件上,在一个所述电芯取料模组中,所述电芯取料模组包括多个电芯吸附组件,各所述电芯吸附组件间隔设置于所述滑动件上,所述电芯吸附组件用于对电芯进行吸附固定。
9.在其中一个实施例中,所述导向件包括固定支架及导向轨道,所述固定支架与所述导向轨道连接,各所述滑动件滑动设置于所述导向轨道。
10.在其中一个实施例中,所述固定支架设置有多个,各所述固定支架分别与所述导向轨道连接。
11.在其中一个实施例中,所述位移驱动件包括电缸,各所述滑动件分别与所述电缸连接,所述电缸用于带动各所述滑动件在所述导向件上进行往复式位移。
12.在其中一个实施例中,所述滑动件为滑板结构。
13.在其中一个实施例中,所述电芯吸附组件包括定位座、升降块及电芯吸头,所述定位座设置于所述滑动件上,所述升降块滑动设置于所述定位座上,所述电芯吸头与所述升降块连接。
14.在其中一个实施例中,所述电芯吸附组件还包括升降气缸,所述升降气缸与所述升降块连接,所述升降气缸用于带动所述升降块向所述导向件的方向进行升降运动。
15.在其中一个实施例中,所述定位座上设置有升降导轨,所述升降块与所述升降导轨连接。
16.在其中一个实施例中,所述电芯吸头包括直线滑轨、吸附定位块、缓冲件及吸嘴,所述直线滑轨设置于所述升降块上,所述吸附定位块与所述直线滑轨连接,所述缓冲件分别与所述吸附定位块及所述升降块连接,所述吸嘴设置于所述吸附定位块上。
17.在其中一个实施例中,所述吸附定位块的横截面为“l”字型结构。
18.与现有技术相比,本实用新型至少具有以下优点:
19.本实用新型的多工位电芯传送机构通过设置移动模组及多个电芯取料模组,从而能够将上一工位处完成加工的电芯快速转移至下一工位,且整体结构较为简单紧凑,能够有效提高整体生产效率。
附图说明
20.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本实用新型的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
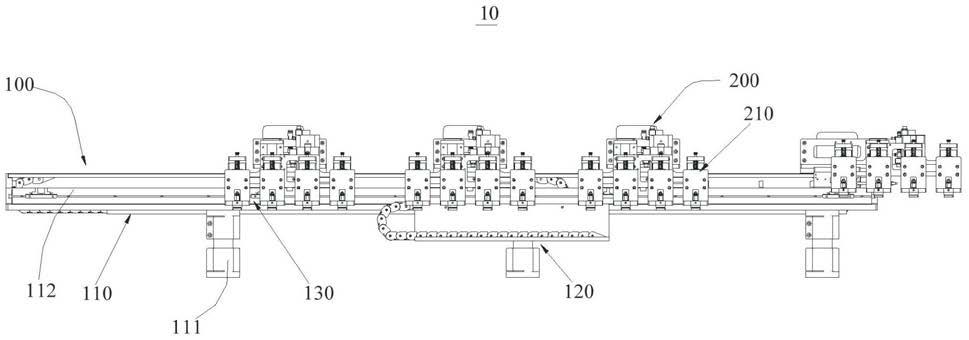
21.图1为本实用新型一实施方式的多工位电芯传送机构的结构示意图;
22.图2为图1中的多工位电芯传送机构的电芯取料模组的结构示意图;
23.图3为图2中的电芯取料模组的电芯吸附组件的结构示意图。
具体实施方式
24.为了便于理解本实用新型,下面将参照相关附图对本实用新型进行更全面的描述。附图中给出了本实用新型的较佳实施方式。但是,本实用新型可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本实用新型的公开内容理解的更加透彻全面。
25.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
26.除非另有定义,本文所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。本文中在本实用新型的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本实用新型。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
27.需要说明的是,本文所使用关于元件与另一个元件“连接”的相关表述,也表示元件与另一个元件“连通”,流体可以在两者之间进行交换连通。
28.一实施方式中,一种多工位电芯传送机构,包括:移动模组及多个电芯取料模组,所述移动模组包括导向件、位移驱动件及多个滑动件,各所述滑动件滑动设置于所述导向件上,所述位移驱动件分别与各所述滑动件连接;各所述电芯取料模组一一对应设置于各所述滑动件上,在一个所述电芯取料模组中,所述电芯取料模组包括多个电芯吸附组件,各
所述电芯吸附组件间隔设置于所述滑动件上,所述电芯吸附组件用于对电芯进行吸附固定。本实用新型的多工位电芯传送机构通过设置移动模组及多个电芯取料模组,从而能够将上一工位处完成加工的电芯快速转移至下一工位,且整体结构较为简单紧凑,能够有效提高整体生产效率。
29.为了更好地对上述多工位电芯传送机构进行说明,以更好地理解上述多工位电芯传送机构的构思。一种多工位电芯传送机构10,包括:移动模组100及多个电芯取料模组200,移动模组100包括导向件110、位移驱动件120及多个滑动件130,各滑动件130滑动设置于导向件110上,位移驱动件120分别与各滑动件130连接;各电芯取料模组200一一对应设置于各滑动件130上,在一个电芯取料模组200中,电芯取料模组200包括多个电芯吸附组件210,各电芯吸附组件210间隔设置于滑动件130上,电芯吸附组件210用于对电芯进行吸附固定。在本实施例中,滑动件为滑板结构。
30.需要说明的是,多工位电芯传送机构10用于对电芯进行搬运转移,使得电芯能够在上一个工位完成加工后,转移至下一工位进行加工操作。具体的,移动模组100用于带动各电芯取料模组200进行往复式移动操作,通过将导向件 110设置于对应的工位上,且各滑动件130滑动设置于导向件110上,从而能够通过位移驱动件120带动各滑动件130在导向件110上进行往复式位移,由此使得对应滑动件130上的电芯取料模组200移动到相应的工位处,然后再通过电芯取料模组200对相应的工位处的电芯进行吸附固定或者放置,从而实现电芯的快速搬运转移。通过设置多个电芯取料模组200,从而能够对应不同的电芯加工工位,例如,电芯取料模组200设置有三个,三个电芯取料模组200分别对应电芯加工的极耳整形工位、焊接工位及检测工位,如此,能够通过对应的电芯取料模组200将极耳整形工位、焊接工位及检测工位上的电芯进行逐级搬运转移,由此能提高整体生产加工的效率,同时,能够使得整体设备结构更加紧凑;进一步地,每一电芯取料模组200均包括多个电芯吸附组件210,如此,能够在同一工位中对多个电芯进行吸附固定及转移,由此提高生产加工的效率。本申请的多工位电芯传送机构10通过设置移动模组100及多个电芯取料模组 200,从而能够将上一工位处完成加工的电芯快速转移至下一工位,且整体结构较为简单紧凑,能够有效提高整体生产效率。
31.如图1所示,在其中一个实施例中,导向件110包括固定支架111及导向轨道112,固定支架111与导向轨道112连接,各滑动件130滑动设置于导向轨道 112上;在本实施例中,固定支架设置有多个,各固定支架分别与导向轨道连接,如此,能够提高整体的结构强度,使得电芯在搬运转移过程中更加稳定。由此使得生产加工的精度得到提高。
32.需要说明的是,导向轨道112通过固定支架111设置在对应的工位上,且各滑动件130滑动设置于导向轨道112上,从而能够使各滑动件130能够在导向轨道112上往复式位移,且能够使得电芯搬运的位移精度更高。
33.在其中一个实施例中,位移驱动件包括电缸,各滑动件分别与电缸连接,电缸用于带动各滑动件在导向件上进行往复式位移。
34.需要说明的是,位移驱动件为电缸驱动结构,从而能够驱动各滑动件在导向件上进行往复式位移,由此能够实现电芯搬运转移操作,且能够使得整体结构更加紧凑。
35.如图2与图3所示,在其中一个实施例中,电芯吸附组件210包括定位座 211、升降块212及电芯吸头213,定位座211设置于滑动件130上,升降块212 滑动设置于定位座211
上,电芯吸头213与升降块212连接。电芯吸附组件210 还包括升降气缸214,升降气缸214与升降块212连接,升降气缸214用于带动升降块212向导向件110的方向进行升降运动。
36.需要说明的是,当移动模组100带动各电芯取料模组200移动到位后,升降气缸214带动升降块212向导向件110的方向进行运动,从使电芯吸头213 下降至对应的电芯吸附位置,由此能够通过电芯吸头213对电芯进行吸附固定,完成吸附操作后,升降气缸214带动升降块212进行复位,从而完成电芯的吸取操作,然后再通过移动模组100带动各电芯取料模组200移动到对应的工位处,从而实现电芯的搬运转移操作。
37.如图3所示,在其中一个实施例中,定位座211上设置有升降导轨211a,升降块212与升降导轨211a连接,如此,通过在定位座211上设置升降导轨211a,使得升降块212能够更加稳定地进行升降运动,由此提高电芯吸头213吸附加工的稳定性。
38.如图3所示,在其中一个实施例中,电芯吸头213包括直线滑轨213a、吸附定位块213b、缓冲件213c及吸嘴213d,直线滑轨设置于升降块上,吸附定位块与直线滑轨连接,缓冲件分别与吸附定位块及升降块连接,吸嘴设置于吸附定位块上。在本实施例中,缓冲件为弹簧,吸附定位块的横截面为“l”字型结构,如此,能使得整体结构更加紧凑,且能够提高整体结构的强度。
39.需要说明的是,由于现有的电芯吸附操作容易对电芯的吸附面进行挤压,从而导致电芯上出现压痕或者破裂,由此导致电芯不良品产生,因此,电芯吸头213通过设置直线滑轨213a、吸附定位块213b、缓冲件213c及吸嘴213d,从而能够通过吸嘴213d对电芯进行吸附固定,当吸嘴213d与电芯的吸附抵接时,吸附定位块213b在反作用力的作用下沿着直线滑轨213a向上运动,并且对缓冲件213c进行挤压,如此,能够防止吸嘴213d压伤电芯,且能够在缓冲件213c的弹性力作用下,使得吸嘴213d与电芯保紧密贴合,由此提高电芯吸附操作的稳定性。
40.与现有技术相比,本实用新型至少具有以下优点:
41.本实用新型的多工位电芯传送机构通过设置移动模组及多个电芯取料模组,从而能够将上一工位处完成加工的电芯快速转移至下一工位,且整体结构较为简单紧凑,能够有效提高整体生产效率。
42.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1