双向驱动的水平多级伸缩臂的制作方法
1.本实用新型涉及多级伸缩臂的技术领域,特别是涉及一种双向驱动的水平多级伸缩臂。
背景技术:
2.伸缩臂原来特指的是装在起重机上的一种工作装置,它是由固定体与移动体通过伸缩缸的作用使移动体伸出及缩回,从而达到更大的挖掘半径和合理的装车高度;现在伸缩臂应用范围更加广泛,凡是存在直线移动的场合均可应用,如本技术所提及水平方向上的应用。伸缩臂按照工作形式分为两种,滑移式伸缩臂和套入式伸缩臂;滑移式伸缩臂通过伸缩缸及滑块的作用使移动体在固定体上“滑移”,主要部件有固定体、移动体、滑块、伸缩缸等;滑移式伸缩臂有受力大、结构简单、生产成本低等优点,但其行程较小,一般其行程在4米内,且一般也只能设计成二段式的;本技术主题的多级伸缩臂,也就是套入式伸缩臂,又称内藏式伸缩臂,其结构是第一段为固定体,其余的都是移动体,所有的移动体都装在固定体内,其原理是一段接二段、二段接三段......再通过行程油缸来使其伸出或缩回的形式,只有一个固定体,二个或以上个移动体,行程油缸条数是所有的移动体减去一;多级伸缩臂有更大的作业半径,但其结构较复杂、生产成本较高,一般都可以设计成三段以;如何简化多级伸缩臂结构,减少动力源(也就是行程油缸)的数量以节省成本,是现有技术需要解决的问题;另外,挖掘机上的伸缩臂应用时有仰角,回程是靠自重回程的,本技术所提及的伸缩臂应用场合是水平的,回程不能依靠自重,如何使伸缩臂回程也是现有技术需要解决的问题。
技术实现要素:
3.本实用新型的目的是为了解决上述问题,提供一种双向驱动的水平多级伸缩臂。
4.本实用新型的技术方案是:一种双向驱动的水平多级伸缩臂,从外到内依次套装第一套臂、第二套臂
…
第n套臂,n≥3;相邻套臂之间设有联动机构;
5.该联动机构包括在外固定点、在内固定点、在外导向轮、在内导向轮、伸出挠性件和缩回挠性件;在外固定点设在第k-2套臂前端;在外导向轮设在第k-1套臂前端;在内导向轮设在第k-1套臂后端;在内固定点设在第k套臂后端,3≤k≤n;该联动机构内,伸出挠性件一端与在外固定点固连,另一端绕经在外导向轮后与在内固定点固连;该联动机构内,缩回挠性件一端与在内固定点固连,另一端绕经在内导向轮后与在外固定点固连;
6.第一套臂为固定套臂;第二套臂连接有伸缩驱动部件,使第二套臂能在第一套臂内伸缩。
7.优选的,伸缩驱动部件包括设置在第一套臂外部的驱动轮、绕在该驱动轮上的伸缩驱动挠性件、设在第一套臂前端的伸出驱动导向轮、设在第一套臂后端的收缩驱动导向轮;伸缩驱动挠性件两端分别向前经过伸出驱动导向轮、向后经过收缩驱动导向轮固定连接在第二套臂上;伸缩驱动挠性件中部与驱动轮相连。
8.优选的,所述的伸出挠性件为钢丝绳或链条或锁链;所述的缩回挠性件为钢丝绳或链条或锁链;所述的伸缩驱动挠性件为钢丝绳或链条或锁链或同步带。
9.优选的,所述的伸缩驱动部件为设置在第一套臂和第二套臂之间的直线运动驱动部件。
10.优选的,所述的直线运动驱动部件为液压缸或气缸或电动推杆或丝杠螺母传动,液压缸或气缸或电动推杆或丝杠螺母传动的输入输出两端分别连接在第二套臂和第一套臂上。
11.优选的,在外导向轮、在内导向轮、伸出驱动导向轮、收缩驱动导向轮均贯穿对应的套臂侧壁后固定。
12.优选的,在外固定点朝向内侧,在内固定点朝向外侧。
13.优选的,同一套臂上的在外固定点相对在外导向轮轮廓靠近中心,在内固定点相对于在内导向轮轮廓远离中心。
14.本实用新型的有益效果是:本实用新型的双向驱动的水平多级伸缩臂从外到内依次套装第一套臂、第二套臂
…
第n套臂,n≥3;相邻套臂之间设有联动机构;该联动机构包括在外固定点、在内固定点、在外导向轮、在内导向轮、伸出挠性件和缩回挠性件;在外固定点设在第k-2套臂外端;在外导向轮设在第k-1套臂外端;在内导向轮设在第k-1套臂内端;在内固定点设在第k套臂内端,3≤k≤n该联动机构内,伸出挠性件和缩回挠性件形成闭环结构,分别连接在外固定点与在内固定点;第二套臂连接伸缩驱动部件。本实用新型能通过驱动第二套臂伸缩一定距离来驱使第n套臂同步伸缩n-1倍该距离,并且结构简单,只需一个驱动部件就能驱动所有伸缩臂进行伸缩。
附图说明
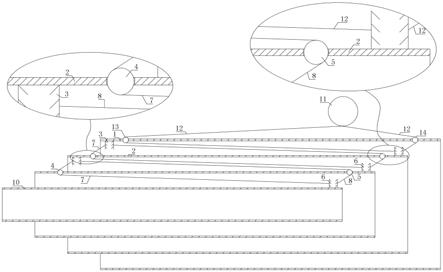
15.图1是实施例一的双向驱动的水平多级伸缩臂回缩时的结构示意图;
16.图2是实施例一的双向驱动的水平多级伸缩臂外伸时的结构示意图;
17.图3是实施例二的双向驱动的水平多级伸缩臂结构示意图;
18.图4是实施例三的双向驱动的水平多级伸缩臂结构示意图;
19.图中:1.第一套臂、2.第二套臂、3.在外固定点、4.在外导向轮、5.在内导向轮、6.在内固定点、7.伸出挠性件、8.缩回挠性件、10.第n套臂、11.驱动轮、12.伸缩驱动挠性件、13.伸出驱动导向轮、14.收缩驱动导向轮、15.直线运动驱动部件。
具体实施方式
20.实施例一:参见图1-2,一种双向驱动的水平多级伸缩臂,从外到内依次套装第一套臂、第二套臂
…
第n套臂,n≥3;本实施例中,n取4;如背景技术中所述的多级伸缩臂一样,第一套臂为固定体,第二套臂
…
第n套臂为移动体;相邻套臂之间设有n-2套联动机构;本实施例中相邻套臂之间设有两套联动机构;
21.该联动机构包括在外固定点、在内固定点、在外导向轮、在内导向轮、伸出挠性件和缩回挠性件;在外固定点设在第k-2套臂前端;在外导向轮设在第k-1套臂前端;在内导向轮设在第k-1套臂后端;在内固定点设在第k套臂后端,3≤k≤n;该联动机构内,伸出挠性件一端与在外固定点固连,另一端绕经在外导向轮后与在内固定点固连;该联动机构内,缩回
挠性件一端与在外固定点相连,另一端绕经在内导向轮后与在内固定点相连;
22.实施例一中,联动机构1包括设在第一套臂前端的在外固定点、设在第二套臂前端的在外导向轮、设在第二套臂后端的在内导向轮、设在第三套臂后端的在内固定点;联动机构1负责的是使第二套臂、第三套臂相对第一套臂伸缩;联动机构2包括设在第二套臂前端的在外固定点、设在第三套臂前端的在外导向轮、设在第三套臂后端的在内导向轮、设在第四套臂后端的在内固定点;联动机构2负责的是使第三套臂、第四套臂相对第二套臂伸缩;
23.第一套臂为固定套臂;第二套臂连接有伸缩驱动部件,使第二套臂能在第一套臂内伸缩。从而获得移动第二套臂的动力源,也是本实施例唯一的动力源。该动力源可以是液压缸传动,也可以是气缸传动,也可以是齿轮齿条传动,还可以是丝杠传动等。
24.这样,同一联动机构内,假设在外固定点为固定基点,在外导向轮、在内导向轮相对在外固定点移动时,由于缩回挠性件和伸出挠性件形成的闭环约束,在内固定点会随之同向移动;在外导引轮/在内导向轮相对在外固定点的移动量等同于在内固定点相对在内导向轮的移动量(这里使用等同,表示两个移动的方向、大小一致);如此,在内固定点相对于在外固定点的移动量相当于两倍的在外导引轮/在内导向轮相对在外固定点的移动量;转换到该联动机构所对应的套臂上,第k套臂相对于第k-2套臂的移动量相当于第k-1套臂相对于第k-2套臂2倍的移动量(k-(k-2)=2);全部套臂综合起来考虑,可得出第n套臂相对于第一套臂n-1倍的第二套臂移动量;由此可知,本实施例的只要驱动第二套臂移动一定距离,第n套臂就相对第一套臂前移n-1倍该移动距离;结合背景技术中内容,第一套臂实际相当于现有技术的固定体,第二套臂
…
第n套臂相当于现有技术的移动体。
25.需要指出的是,实施例一的联动机构中无论在外导向轮还是在内导向轮均是为了改变挠性件的走向;而在内固定点、在外固定点也只是为了连接挠性件端部;挠性件有很多种选择,如钢丝绳、链条、皮带等,对应的导向轮也对应设置钢丝绳过轮、链轮、皮带轮等;凡是可进行挠性传动的均可对应选择;
26.伸缩驱动部件包括设置在第一套臂外部的驱动轮、绕在该驱动轮上的伸缩驱动挠性件、设在第一套臂前端的伸出驱动导向轮、设在第一套臂前端的收缩驱动导向轮;伸缩驱动挠性件两端分别向前经过伸出驱动导向轮、向后经过收缩驱动导向轮固定连接在第二套臂上;伸缩驱动挠性件中部与驱动轮相连;伸出驱动导向轮、收缩驱动导向轮帮助伸缩驱动挠性件形成闭环结构;而后伸缩驱动挠性件又分别与驱动轮、第二套臂相连;这样,驱动轮转动能够借助伸缩驱动挠性件驱动第二套臂的移动;第二套臂相对第一套臂的移动,实际就是第二套臂相对第一套臂进行伸缩;再借助上述的联动机构,如多米罗骨牌一样,第二套臂伸缩驱动第三套臂伸缩;第三套臂伸缩又驱动第四套臂伸缩;最后第四套臂相对第一套臂的伸缩量,实际为第二套臂相对第一套臂的伸缩量的三倍;而伸缩驱动部件输出第二套臂的伸缩量,就可以驱使第四套臂相对第一套臂伸缩三倍伸缩驱动部件的输出量。
27.所述的伸出挠性件为钢丝绳或链条或锁链;所述的缩回挠性件钢丝绳或链条或锁链;所述的伸缩驱动挠性件为钢丝绳或链条或锁链。
28.在外导向轮、在内导向轮、伸出驱动导向轮、收缩驱动导向轮均贯穿对应的套臂侧壁后固定。这样挠性件可以在外导向轮、在内导向轮、伸出驱动导向轮、收缩驱动导向轮破开的贯穿孔通过;如果在外导向轮、在内导向轮、伸出驱动导向轮、收缩驱动导向轮并不贯穿套臂壳体,伸缩过程挠性件倾角变化会引起的挠性件穿过相应套臂的位置发生变化,套
臂需增加较长的避让孔,影响套臂结构强度。
29.在外固定点朝向内侧,在内固定点朝向外侧,减少挠性件需要穿过套臂的次数,从而减少挠性件需要面对的摩擦。
30.同一套臂上的在外固定点相对在外导向轮轮廓靠近中心,在内固定点相对于在内导向轮轮廓远离中心;这样连接起来的挠性件路线就不会相互干涉,确保伸缩臂伸缩过程安全稳定。
31.实施例一的工作过程:
32.驱动轮驱动伸缩驱动挠性件进行运动;与伸缩驱动挠性件相连的第二套臂跟着同步运动;第二套臂上的在外固定点、在外导向轮、在内导向轮进行同步、同向的移动;第二套臂的在外导向轮、在内导向轮移动会推动第三套臂在内固定点相对第二套臂在外固定点进行同步、同向、等量的移动;这样第三套臂相对第一套臂进行两倍的第二套臂的移动量;依此类推,第四套臂会相对第一套臂进行3倍的第二套臂的移动量,也就是第四套臂伸缩量是第二套臂伸缩量的3倍;第二套臂是伸缩驱动部件直接驱动的。
33.实施例二:参见图3,实施例二与实施例一的方案基本相同,相同之处不再赘述,不同之处在于:n取3,则实施例二中共有三个套臂,分别为第一套臂、第二套臂、第三套臂;相邻套臂之间共有1个联动机构;该联动机构包括设在第一套臂前端的在外固定点、设在第二套臂前端的在外导向轮、设在第二套臂后端的在内导向轮、设在第三套臂后端的在内固定点;该联动机构负责的是使第二套臂、第三套臂相对第一套臂伸缩;
34.实施例三:参见图4,实施例三与实施例一的方案基本相同,相同之处不再赘述,不同之处在于:所述的伸缩驱动部件为设置在第一套臂和第二套臂之间的直线运动驱动部件。
35.所述的直线运动驱动部件为液压缸或气缸或电动推杆或丝杠螺母传动,液压缸或气缸或电动推杆或丝杠螺母传动的输入输出两端分别连接在第二套臂和第一套臂上。
36.直线运动驱动部件直接带动第二套臂进行移动,来实现整个伸缩臂的伸缩。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1