一种新型电梯机械式自动门机的制作方法
1.本实用新型涉及电梯技术领域,尤其涉及一种新型电梯机械式自动门机。
背景技术:
2.电梯是指服务于建筑物内若干特定的楼层,其轿厢运行在至少两列垂直于水平面或与铅垂线倾斜角小于15
°
的刚性轨道运动的永久运输设备。也有台阶式,踏步板装在履带上连续运行,俗称自动扶梯或自动人行道。服务于规定楼层的固定式升降设备。垂直升降电梯具有一个轿厢,运行在至少两列垂直的或倾斜角小于15
°
的刚性导轨之间。
3.电梯门机,是一个负责启、闭电梯厅轿门的机构,当其受到电梯开、关门信号,电梯门机通过自带的控制系统控制开门电机,将电机产生的力矩转变为一个特定方向的力,关闭或打开门。当阻止关门力大于150n的时候,门机自动停止关门,并反向打开门,起到一定程度的关门保护作用。
4.现有市面上的电梯机械式自动门机在工作使用中存在,装置多为带传动式工作,容易导致磨损较大且容易损坏的情况,并且装置在闭合后不方便进行稳定的限位,容易造成门体后溜。
5.因此,有必要提供一种新型电梯机械式自动门机解决上述技术问题。
技术实现要素:
6.本实用新型提供一种新型电梯机械式自动门机,解决了装置多为带传动式工作,容易导致磨损较大且容易损坏的情况,并且装置在闭合后不方便进行稳定的限位,容易造成门体后溜的问题。
7.为解决上述技术问题,本实用新型提供的一种新型电梯机械式自动门机,包括安装板,所述安装板的上表面安装有电机,所述安装板的外部分别安装有开合机构与限位机构,所述电机的输出端键槽连接有驱动轮,所述驱动轮的外壁套设有第一皮带,所述安装板的上表面且位于电机的一侧固定有固定座,所述固定座的外壁设有衔接轮,所述衔接轮的外壁套设有第二皮带。
8.优选的,所述电机通过使用螺栓与安装板固定安装,所述衔接轮的轴心处通过轴承与固定座相连接。
9.优选的,所述开合机构包括安装于安装板外壁的第一链轮与第二链轮,所述第一链轮与第二链轮的外壁啮合连接有链条,所述链条的内部分别卡合连接有第一卡块与第二卡块,且第一卡块与第二卡块的数量分别为两个,两个所述第一卡块与两个所述第二卡块的底部固定有安装框,且安装框的数量为两个,两个所述安装框的底部均安装有门体,所述第一链轮的轴心处且位于第一皮带内壁固定有第一带轮,所述第二链轮的轴心处且位于第二皮带内壁固定有第二带轮。
10.优选的,所述第一链轮与第二链轮的轴心处分别通过轴承与安装板相连接,两个所述门体均通过螺栓与两个所述安装框固定安装。
11.优选的,所述限位机构包括固定于其中一个所述第一卡块上表面的定位板,且定位板的数量为两个,两个所述定位板的内部安装有滚轮,所述安装板的外壁固定有连接座,且连接座的数量为四个,四个所述连接座的内部固定有滑杆,且滑杆的数量为两个,两个所述滑杆的外壁滑动连接有限位块,两个所述滑杆的外壁均套设有弹簧。
12.优选的,所述滚轮的两端均通过轴承与两个所述定位板相连接,两个所述弹簧的上下两端均与限位块、其中两个所述连接座固定连接。
13.与相关技术相比较,本实用新型提供的一种新型电梯机械式自动门机具有如下有益效果:
14.对本装置设计有开合机构,采用链条进行传动运动,这样的设计不但传动稳定,还具备了结实耐用的优点,第二链轮旋转时可控制第二带轮通过带动第二皮带控制衔接轮在固定座内旋转衔接运动,这样可以对传动的链条进行定位安装,并且还设计有限位机构,滚轮接触控制限位块通过两个弹簧进行上升,最后弹簧回弹控制限位块复位对门体进行限位定位,这样可以对闭合后的门体进行限位,防止门体后溜。
附图说明
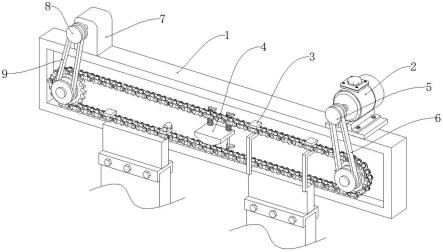
15.图1为本实用新型提供的一种新型电梯机械式自动门机的一种较佳实施例的结构示意图;
16.图2为图1所示开合机构结构示意图;
17.图3为图1所示限位机构结构示意图。
18.图中标号:1、安装板;2、电机;3、开合机构;31、第一链轮;32、第二链轮;33、链条;34、第一卡块;35、第二卡块;36、安装框;37、门体;38、第一带轮;39、第二带轮;4、限位机构;41、定位板;42、滚轮;43、连接座;44、滑杆;45、限位块;46、弹簧;5、驱动轮;6、第一皮带;7、固定座;8、衔接轮;9、第二皮带。
具体实施方式
19.下面结合附图和实施方式对本实用新型作进一步说明。
20.请结合参阅图1至图3,其中,图1为本实用新型提供的一种新型电梯机械式自动门机的一种较佳实施例的结构示意图;图2为图1所示开合机构结构示意图;图3为图1所示限位机构结构示意图。一种新型电梯机械式自动门机,包括安装板1,安装板1的上表面安装有电机2,安装板1的外部分别安装有开合机构3与限位机构4,电机2的输出端键槽连接有驱动轮5,驱动轮5的外壁套设有第一皮带6,安装板1的上表面且位于电机2的一侧固定有固定座7,固定座7的外壁设有衔接轮8,衔接轮8的外壁套设有第二皮带9。
21.电机2通过使用螺栓与安装板1固定安装,衔接轮8的轴心处通过轴承与固定座7相连接,通过螺栓进行安装,这样的设计方便用户对电机2进行拆解组装。
22.开合机构3包括安装于安装板1外壁的第一链轮31与第二链轮32,第一链轮31与第二链轮32的外壁啮合连接有链条33,链条33的内部分别卡合连接有第一卡块34与第二卡块35,且第一卡块34与第二卡块35的数量分别为两个,两个第一卡块34与两个第二卡块35的底部固定有安装框36,且安装框36的数量为两个,两个安装框36的底部均安装有门体37,第一链轮31的轴心处且位于第一皮带6内壁固定有第一带轮38,第二链轮32的轴心处且位于
第二皮带9内壁固定有第二带轮39。
23.第一链轮31与第二链轮32的轴心处分别通过轴承与安装板1相连接,两个门体37均通过螺栓与两个安装框36固定安装,采用轴承进行连接,这样的设计可以使得第一链轮31和第二链轮32旋转更加的稳定。
24.限位机构4包括固定于其中一个第一卡块34上表面的定位板41,且定位板41的数量为两个,两个定位板41的内部安装有滚轮42,安装板1的外壁固定有连接座43,且连接座43的数量为四个,四个连接座43的内部固定有滑杆44,且滑杆44的数量为两个,两个滑杆44的外壁滑动连接有限位块45,两个滑杆44的外壁均套设有弹簧46。
25.滚轮42的两端均通过轴承与两个定位板41相连接,两个弹簧46的上下两端均与限位块45、其中两个连接座43固定连接。
26.本实用新型提供的一种新型电梯机械式自动门机的工作原理如下:
27.首先用户使用前需要启动电机2,电机2启动后旋转控制驱动轮5带动第一皮带6控制联动控制第一带轮38旋转控制第一链轮31在安装板1外旋转运动,第一链轮31旋转时可联动控制链条33啮合控制第二链轮32在安装板1内旋转运动,当链条33传动运动时可控制两个第一卡块34和两个第二卡块35控制两个安装框36进行相对运动开合运动,这样即可控制门体37进行开合运动,并且当第二链轮32旋转时可控制第二带轮39通过带动第二皮带9控制衔接轮8在固定座7内旋转衔接运动,并且当两个门体37闭合时,则可以平移控制滚轮42接触控制限位块45通过两个弹簧46进行上升,最后弹簧46回弹控制限位块45复位对门体37进行限位定位。
28.与相关技术相比较,本实用新型提供的一种新型电梯机械式自动门机具有如下有益效果:
29.对本装置设计有开合机构3,采用链条33进行传动运动,这样的设计不但传动稳定,还具备了结实耐用的优点,第二链轮32旋转时可控制第二带轮39通过带动第二皮带9控制衔接轮8在固定座7内旋转衔接运动,这样可以对传动的链条33进行定位安装,并且还设计有限位机构4,滚轮42接触控制限位块45通过两个弹簧46进行上升,最后弹簧46回弹控制限位块45复位对门体37进行限位定位,这样可以对闭合后的门体37进行限位,防止门体37后溜。
30.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1