一种局部清洁机器人的制作方法
1.本发明属于自动化技术领域,特别涉及一种局部清洁机器人。
背景技术:
2.齿轮在渗碳前需要进行清洁,对于齿轮的渗碳,目前大都采用连续式渗碳炉或密封箱式多用炉进行渗碳处理,如果工件在渗碳前不进行清洁,炉内油烟过大,将会破坏炉内的气氛,影响渗碳的质量,齿轮表面清洁较为方便,但是在齿轮齿间的部分,在化学水清洗后,仍会有部分附着物附着于齿间部分,尤其是对于一些精密齿轮,附着物更为明显,附着物来源于工业生产时产生的残渣以及对齿轮进行化学处理、防锈处理是产生新的附作物,用高强的水冲刷时较为麻烦,如果不处理这些附着物也会在炉内产生碳黑,最终影响齿轮的强度,所以对于渗碳齿轮,在热处理渗碳前需要对齿轮进行清洁之后才能进行渗碳淬火。
技术实现要素:
3.本发明为解决上述背景技术中存在的技术问题,提供一种局部清洁机器人。齿轮的表面清洁较为容易,但是在齿轮的齿间部分,由于齿轮本身的构造,在其齿间部分的清洁较为复杂,在齿轮进行化学除污、防锈处理时,齿轮齿间的附着物难以清除,选用高压水进行冲刷时,所需要的水较多,对于高压水的喷射方向也需要做相应的设定,无疑增大生产成本和技术难度。
4.本发明采用以下技术方案:一种局部清洁机器人,被设置为清洁齿轮的齿间,包括支架和设置在所述支架上的工作台,还包括:分流机构,设于所述工作台上;所述分流机构对多个齿轮进行分流,控制一个清洁周期内一个齿轮通过所述分流机构;承载机构,设置在所述工作台上且临近所述分流机构的末端;所述承载机构调整所述分流机构传送的齿轮的空间放置方向;夹持模块,夹持所述承载机构上的齿轮,并将齿轮传递至预设位置;所述夹持模块分为第一夹持机构和第二夹持机构;清洁机构,清洁所述夹持模块中的所夹持齿轮的齿间。
5.通过采用上述技术方案,在一个清洁的周期内,单个齿轮到达承载机构上,第一夹持机构夹持齿轮,并传送至第二夹持机构上,第二夹持机构夹持齿轮,并对齿轮进行旋转,控制清洁机构靠近齿轮并开始工作,清洁机构清洁齿轮的齿间。
6.在进一步的实施例中,所述分流机构包括:第一轨道,倾斜预定角度设于所述工作台上;所述第一轨道末端设置为多齿耙结构;三角旋转组件,设于所述第一轨道的侧面;所述三角旋转组件在一个清洁周期内旋转预设角度。
7.通过采用上述技术方案,三角旋转组件与第一轨道形成一个只允许单个齿轮通过
的分流机构。
8.在进一步的实施例中,所述承载机构包括:旋转台,设于所述工作台且临近所述第一轨道末端;旋转齿耙,旋转设于所述旋转台上;旋转气缸带动所述旋转齿耙旋转,所述旋转齿耙穿过所述第一轨道末端,控制齿轮旋转以齿轮的齿为圆心旋转预定角度;挡板,平行于所述旋转齿耙的旋转轴设于所述工作台上;所述旋转齿耙旋转至与所述挡板平行时,形成定位空间,定位空间底部设置定位组件用以定位齿轮。
9.通过采用上述技术方案,旋转气缸带动旋转气缸带动旋转齿耙旋转,将齿轮翻转至旋转齿耙旋转至与挡板平行时形成的定位空间内。
10.在进一步的实施例中,所述定位组件包括:弧形板,齿轮置于所述弧形板的弧形面上;多个第一弹簧,设于所述旋转台上且临近所述旋转齿耙;多个第二弹簧,设于所述旋转台上且临近所述挡板;所述第二弹簧弹性大于所述第一弹簧,使所述弧形板相对于所述旋转台偏转预定角度,使齿轮的底部置于所述弧形板上且齿轮的顶部倒向所述旋转齿耙。
11.通过采用上述技术方案,使齿轮始终依靠在旋转齿耙上,清洁完成后,旋转气缸转动旋转齿耙,将清洁后的齿轮放置在第四轨道上,在重力的作用下,清洁后的齿轮由第四轨道滑出。
12.在进一步的实施例中,所述第一夹持机构包括:第一滑轨,设于支架上;第二气缸,通过第一安装板安装于所述第一滑轨的滑动端的侧面;所述第二气缸的伸缩端上下方向上进行伸缩;第三双向气缸,设于所述第二气缸的伸缩端;所述第三双向气缸的伸缩端相对于所述第二气缸的伸缩端在左右方向上进行伸缩;两个弧形夹爪,通过连接件相对安装于所述第三双向气缸的两个伸缩端的下方位置;所述弧形夹爪夹持齿轮的圆周齿面,所述弧形夹爪的夹持面设置为凹面。
13.通过采用上述技术方案,在弧形夹爪夹取齿轮时,在不对齿轮产生横向夹持力的情况下,通过空间的设置,固定齿轮的相对位置,实现一个柔性的夹取。
14.在进一步的实施例中,所述第二夹持机构包括:两个第二滑轨,对称所述弧形夹爪的移动路径的两侧,且中间设置允许单个齿轮的轴向长度通过的间距;第一定位板、第二定位板,相对设于两个所述第二滑轨的滑动座上;通过旋转件设于所述第一安装板侧面的转盘,所述转盘表面设有橡胶组;设于第二定位板的上的第四气缸,在所述第四气缸的伸缩端通过轴承安装转盘;两个所述转盘相对运动用于夹紧齿轮件进行旋转。
15.通过采用上述技术方案,第二滑轨控制第一定位板、第二定位板相对移动,控制转盘夹取齿轮的圆面,转盘上设有橡胶组,用于加强两个转盘夹持齿轮是的摩擦力,第四气缸进一步施加推力至转盘,使得两个转盘进一步夹紧齿轮。
16.在进一步的实施例中,所述清洁机构包括:
第三滑轨,设于所述工作台上且位于所述第一滑轨的移动路径的延长线上;安装件,设于所述第三滑轨的滑动座上;转动轴,通过轴承设于所述安装件上;毛刷,设于所述转动轴的上部位置。
17.通过采用上述技术方案,使毛刷的旋转方向与齿轮的转向垂直,采用齿轮旋转速度较小,毛刷旋转速度大的速度设计,使得毛刷充分刷清齿轮齿间上的附着物。
18.在进一步的实施例中,还包括,设于所述工作台下方的第三轨道,所述第三轨道一端穿过所述工作台处于两个所述第二滑轨之间。
19.通过采用上述技术方案,齿轮一旦从第二夹持机构上脱落,掉落在第三轨道上滑出。
20.在进一步的实施例中,还包括第四轨道,设于所述承载机构的另一侧,与所述第一轨道在空间上呈线性。。
21.本发明的有益效果:对在不损害齿轮原有的性质下,对齿轮用物理的方式处理齿间的附着物,通过毛刷柔性刷动齿轮的齿间,来清理附着物;批量化清洁齿轮。
附图说明
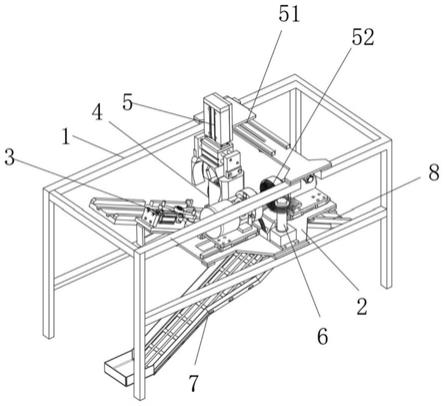
22.图1是本发明的整体结构示意图。
23.图2是本发明的分流机构结构示意图。
24.图3是本发明的承载机构结构示意图。
25.图4是本发明的定位组件结构示意图。
26.图5是本发明的定位组件俯视图结构示意图。
27.图6是本发明的夹持模块结构示意图。
28.图7是本发明的清洁机构结构示意图。
29.图1至图7中的各标注为:支架1、工作台2、分流机构3、第一轨道31、三角旋转组件32、承载机构4、旋转台41、旋转齿耙42、旋转气缸43、挡板44、定位组件45、弧形板451、第一弹簧452、第二弹簧453、夹持模块5、第一夹持机构51、第一滑轨511、第一安装板512、第二气缸513、第三双向气缸514、弧形夹爪515、第二夹持机构52、第一定位板521、第二定位板522、第二滑轨523、转盘523、橡胶组524、第四气缸525、清洁机构6、第三滑轨61、安装件62、转动轴63、毛刷64、第三轨道7、第四轨道8。
具体实施方式
30.清洁齿轮的齿间部分,尤其是一些精密齿轮,齿间距更小,齿数更多,清理难度更大,由于齿轮本身的构造,其清理路线为圆形,选用清水进行高压冲刷时,需要调整齿轮或者水枪的运动轨迹,是两者相对应,技术难度较大,同时浪费水资源,尤其是在齿轮进行过除油处理、防锈处理、除毛刺等处理后,齿间的附着物黏性较小,只需物理处理即可。
31.本实施例中该局部清洁机器人,通过物理方式清洁齿轮的齿间,采用毛刷64与齿轮的齿间紧密接触,使毛刷64的旋转方向与齿轮的转向垂直,采用齿轮旋转速度较小,毛刷64旋转速度大的速度设计,使得毛刷64充分刷清齿轮齿间上的附着物,该局部清洁机器人包括工作台2、分流机构3、承载机构4、夹持模块5和清洁机构6,其中工作台2设置在支架1
上,用于安装分流机构3、承载机构4、夹持模块5和清洁机构6,分流机构3对多个齿轮进行分流,在一个清洁的周期内允许通过一个齿轮,单个齿轮到达承载机构4上,承载机构4对齿轮进行空间的转向,使得齿轮的空间放置位置对应于夹持模块5的夹持部件,第一夹持机构51夹持齿轮,并传送至第二夹持机构52上,第二夹持机构52夹持齿轮,并对齿轮进行旋转,此时控制清洁机构6靠近齿轮并开始工作,清洁机构6清洁齿轮的齿间。
32.基于上述结构,存在如何对齿轮进行分流,齿轮的形状以及多个齿轮放置在同一轨道上时,齿轮与齿轮之间的接触为紧密的啮合接触,分流难度较大,在进一步的实施例中,设置一种转动型分流机构3,其中第一轨道31倾斜设置在工作上,齿轮放置在第一轨道31上在重力作用下,使齿轮沿着第一轨道31滑动至承载机构4上,基于每队齿轮之间的紧密啮合关系,采用三件旋转组件,通过控制三角旋转组件32旋转,三件旋转组件的旋转方向对应于齿轮在第一轨道31上的滑行方向来控制齿轮分流,其中三角旋转组件32为120度设置三个旋转角,每个旋转角之间设有弧形面,在旋转角的顶端处设有滚轮,且旋转角的长度设置较短,三角旋转件的旋转周期为120度,与第一轨道31形成一个只允许单个齿轮通过的分流机构3。
33.基于上述机构,存在如何控制齿轮的空间放置方向,便于夹持模块5夹持齿轮,齿轮的特殊结构导致其夹取的方式并不多,为此需要将齿轮调整至指定的放置方式才可以夹取,在进一步的实施例中,在第一轨道31的末端设置承载机构4用于调整齿轮空间位置,旋转台41设置在工作台2上且临近第一轨道31末端,旋转齿耙42旋转设于旋转台41上,旋转气缸43带动旋转齿耙42旋转,初始位置设置为旋转齿耙42穿过第一轨道31末端,挡板44平行于旋转齿耙42的旋转轴设于工作台2上,单个齿轮滑动至第一轨道31的末端,此时旋转气缸43带动旋转气缸43带动旋转齿耙42旋转,将齿轮翻转至旋转齿耙42旋转至与挡板44平行时,形成的定位空间内。
34.基于上述结构,存在承载机构4如何固定齿轮的位置,放置齿轮发生滚动,以及齿轮清洁完成后,如何批量传送出来,在进一步的实施例中,在旋转齿耙42于挡板44之间设置定位组件45,即通过弧形板451放置齿轮发生滚动,通过旋转台41旋转一定角度,使得旋转齿耙42的旋转向对应于第四轨道8,第一弹簧452和第二弹簧453的弹力不同,第二弹簧453弹性大于第一弹簧452,使弧形板451相对于旋转台41偏转预定角度,使齿轮始终依靠在旋转齿耙42上,旋转气缸43转动旋转齿耙42,将清洁后的齿轮放置在第四轨道8上,在重力的作用下,清洁后的齿轮由第四轨道8滑出。
35.基于上述结构,夹取齿轮的方式不多,优先采用夹取齿轮圆周面的方式,对齿轮进行传送,在进一步的实施例中,第一夹持机构51包括通过弧形夹爪515夹取齿轮的圆周齿面,弧形夹爪515的夹持面设置为凹面,在弧形夹爪515夹取齿轮时,在不对齿轮产生横向夹持力的情况下,通过空间的设置,固定齿轮的相对位置,实现一个柔性的夹取,第一滑轨511控制齿轮滑动至第二夹持机构52上方,第二气缸513下降是齿轮抵至预定位置。
36.基于上述结构,对齿间的清洁选用齿轮自转的方式,在进一步的实施例中,第二滑轨523控制第一定位板521、第二定位板522相对移动,控制转盘523夹取齿轮的圆面,转盘523上设有橡胶组524,用于加强两个转盘523夹持齿轮是的摩擦力,此时第三双向气缸514控制弧形夹爪515松开夹持的齿轮,第二气缸513上升,使得第一夹持机构51远离第二夹持机构52,第四气缸525进一步施加推力至转盘523,使得两个转盘523进一步夹紧齿轮件进行
旋转,电机带动另一个转盘523转动,控制齿轮转动。
37.基于上述结构,需要对齿轮的齿间进行清洁,在进一步的实施例中,控制第三滑轨61沿着第一滑轨511的移动路径的延长线上滑动,使得毛刷64与齿轮的齿间充分接触,安装件62内设电源和电机,带动转动轴63旋转,此时毛刷64对齿轮的齿间进行清洁工作。
38.进一步的,可以选用较高旋转速度的清洁机构6,降低第二夹持机构52上转盘523带动齿轮旋转的速度。
39.基于上述结构,在第二夹持机构52夹持齿轮时,机器人较长时间的工作,以及自身可能发生故障,齿轮一旦从第二夹持机构52上脱落,会卡死整个机器人,在进一步的实施例中,还设有收集此类故障的装置,即在两个第二滑轨523之间设置条形通孔,允许齿轮通过,在齿轮脱落时,齿轮掉落在第三轨道7上滑出,既可以放置齿轮在机器人内部发生卡死。
40.工作原理:将多个齿轮放置在第一轨道31上,三角旋转组件32对多个齿轮进行周期性的分流,单个齿轮滑动至承载机构4的弧形板451上,旋转气缸43带动旋转齿耙42旋转,翻转齿轮,在第一弹簧452和第二弹簧453不同大小的作用力下,齿轮依靠在旋转齿耙42上,第二气缸513控制第三气缸下降,第三气缸控制弧形夹爪515夹取齿轮,第一滑轨511控制齿轮滑动至第二夹持机构52上的转盘523中心处,转盘523上设有橡胶组524,第二滑轨523控制第一定位板521、第二定位板522相对移动,控制转盘523夹取齿轮的圆面,此时第三双向气缸514控制弧形夹爪515松开夹持的齿轮,第二气缸513上升控制弧形夹爪515上升至指定高度,第四气缸525进一步施加推力至其中一个转盘523,使得两个转盘523进一步夹紧齿轮件进行旋转,电机带动另一个转盘523转动,控制齿轮转动,第三滑轨61沿着第一滑轨511的移动路径的延长线上滑动,使得毛刷64与齿轮的齿间充分接触,旋转转动轴63,对齿轮进行清洁,清洁完成后,第一夹持机构51再次夹取齿轮,第二夹持机构52松开齿轮,第一夹持机构51夹持齿轮至承载机构4上,旋转台41旋转预定角度至第四轨道8,旋转气缸43带动旋转齿耙42旋转,使齿轮从第四轨道8滑出,其中齿轮一旦从第二夹持机构52上脱落,掉落在第三轨道7上滑出。
41.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1