一种电磁式摇床床头的制作方法
[0001]
本发明涉及选矿机械设备的技术领域,尤其涉及一种电磁式摇床床头。
背景技术:
[0002]
在选矿领域中,对细小颗粒矿石大多采用摇床进行选别,即根据金属矿物与杂质比重的不同,使矿浆在摇床的摇摆振动床面上完成金属与杂质的分,从而选出有用的金属矿物。一般地,选矿摇床通常是由床体、机架和传动机构三大部分组成。选矿摇床可以使矿粒按其比重和粒度不同而沿不同方向运动,并从给矿槽开始沿对角线里扇形展开,依次沿床体表面的边沿排出,排矿线很长,能产出多种品位不同的产物,如精矿、次精矿、中精矿和尾矿等。
[0003]
现有技术中摇床主要分为:采用偏心连杆式床头的6-s型;采用凸轮杠杆式床头的云锡摇床;采用硬软弹簧造成差动的弹簧摇床和离心式摇床。虽在床面结构形式、床面材质和调坡机构上有所改进,但能够实现摇床往复差运动的核心部件床头的改进很少,在摇床往复差动的实现方式方面,不少专家学者做了大量的研究工作。液压驱动床头的研究进展比较大。相比现有的6s床头、云溪床头和弹簧摇床床头而言,液压床头摇床往复差动幅度较大,利于矿物的分选。但是液压床头因液压元器件的响应时间较长,摇床的频率受限。进而限制了摇床处理能力和分选性能的进一步提升。如何能提供一种响应时间短,控制精度高。能克服传统摇床频率冲程调节不便、往复速度差小等诸多缺陷的摇床床头是现阶段急需解决的问题。
技术实现要素:
[0004]
本发明目的是提供一种电磁式摇床床头,所述电磁式摇床床头包括壳体、电磁部、动铁部和智能操控部,所述电磁部和动铁部设于所述壳体内,所述智能操控部与电磁部连接;所述电磁部包括第一电磁腔和第二电磁腔,所述第一电磁腔和第二电磁腔之间设有电子位移计,所述第一电磁腔和第二电磁腔均包括电磁圈腔和动铁部位移腔,所述电磁圈腔内均设有电磁线圈,所述第一电磁腔和第二电磁腔内的电磁线圈匝数不相同,第一电磁腔动铁部位移腔和第二电磁腔动铁部位移腔外侧端均设有动铁部连接头,所述动铁部连接头同轴心套于所述动铁部上;所述动铁部包括非导磁动铁棒和锥台形铁芯组,所述锥台形铁芯组与所述非导磁动铁棒固定连接;所述非导磁动铁棒的两端连通所述第一电磁腔和第二电磁腔后贯穿所述壳体,所述非导磁动铁棒的两端通过伸缩杆与摇床床面铰接;所述锥台形铁芯组包括第一铁芯和第二铁芯,所述第一铁芯和第二铁芯镜像对称分布与所述非导磁动铁棒两端,所述第一铁芯和第二铁芯分别设于所述第一电磁腔和第二电磁腔内,所述第一铁芯和第二铁芯尺寸大小不相同进一步地,所述电子位移计与所述非导磁动铁棒中心连接,测量非导磁动铁棒位移距
离。
[0005]
进一步地,所述动铁部连接头包括直线轴承和锥台形铁芯阻挡部,所述直线轴承插接与所述锥台形铁芯阻挡部内通过固定螺栓固定连接,所述直线轴承同轴心套于与所述与非导磁动铁棒上。
[0006]
进一步地,所述第一铁芯和第二铁芯锥台面均对向所述锥台形铁芯阻挡部,所述锥台形铁芯阻挡部设有锥台形凹槽。
[0007]
进一步地,所述非导磁动铁棒的两端与所述伸缩杆螺纹连接,所述伸缩杆通过铰链法兰与所述摇床床面铰接。
[0008]
进一步地,为减小线圈电感,所述电磁线圈采用并线缠绕法。
[0009]
进一步地,所述智能操控部包括智能控制器和电源,所述智能控制器与所述电磁线圈和所电子位移计连接,通过接收电子位移计的位移信息控制电磁线圈内电流大小。
[0010]
本发明的优势在于:(1)本发明的摇床的往复运动速度和加速度可控,两个方向运动的差速度可控。可增强摇床床面的搬运作用,提高摇床的处理能力。改善摇床面上矿物的分层、分带和分选效果。
[0011]
(2)本发明摇床的冲程调节方便,只需设定线圈交替通断的位移计参数即可调节摇床冲程。
[0012]
(3)本发明频率调节方便,在冲程不变的情况下,调节电磁线圈中的电流的大小,即可调整动铁部的往复频率。
[0013]
(4)本发明摇床智能化、自动化程度高,智能控制器可根据位移计的测量和反馈,智能运算并控制通过两个电磁电磁线圈的电流大小及通断时间。在设备负荷发生变化时,智能控制器会根据负荷的变化对控制进行调整。
[0014]
(5)本发明摇床由电磁感应直接驱动,减少减速和不必要的机械传动造成的能量损失,更加的节能。
附图说明
[0015]
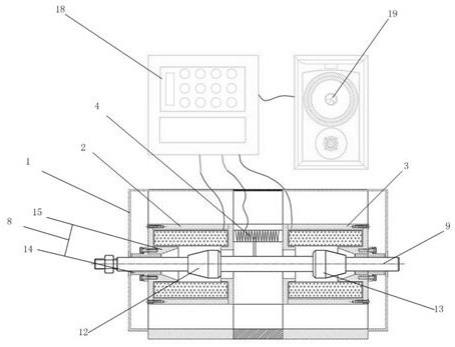
图1为本发明结构图;图2为图1局部放大图;图3为本发明侧视图;图4为本发明与摇床床面连接结构图。
[0016]
图纸标号壳体(1),第一电磁腔(2),第二电磁腔(3),电子位移计(4),电磁圈腔(5),动铁部位移腔(6),电磁线圈(7),动铁部连接头(8),非导磁动铁棒(9),伸缩杆(10),摇床床面(11),第一铁芯(12),第二铁芯(13),直线轴承(14),锥台形铁芯阻挡部(15),锥台形凹槽(16),铰链法兰(17),智能控制器(18),电源(19)。
具体实施方式
[0017]
下面通过结合附图的形式来对本发明的具体实施方式来做进一步的详细的说明,但以下实施例仅列举的是较优选的实施例,其仅起到解释说明的作用来帮助理解本发明,并不能理解为是对本发明作的限定。
[0018]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。
[0019]
下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0020]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0021]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0022]
实施例1如图1-4所示一种电磁式摇床床头,所述电磁式摇床床头包括壳体1、电磁部、动铁部和智能操控部,所述电磁部和动铁部设于所述壳体1内,所述智能操控部与电磁部连接;所述电磁部包括第一电磁腔2和第二电磁腔3,所述第一电磁腔2和第二电磁腔3之间设有电子位移计4,所述第一电磁腔2和第二电磁腔3均包括电磁圈腔5和动铁部位移腔6,所述电磁圈腔5内均设有电磁线圈7,所述第一电磁腔2内的电磁线圈7匝数小于所述第二电磁腔3内的电磁线圈7匝数,为减小线圈电感,所述电磁线圈7采用并线缠绕法,第一电磁腔2动铁部位移腔6和第二电磁腔3动铁部位移腔6外侧端均设有动铁部连接头8,所述动铁部连接头8同轴心套于所述动铁部上;所述动铁部包括非导磁动铁棒9和锥台形铁芯组,所述锥台形铁芯组与所述非导磁动铁棒9固定连接;所述非导磁动铁棒9的两端连通所述第一电磁腔2和第二电磁腔3后贯穿所述壳体1,所述非导磁动铁棒9的两端与所述伸缩杆10螺纹连接,所述伸缩杆10通过铰链法兰17与所述摇床床面11铰接,所述电子位移计4与所述非导磁动铁棒9中心连接,测量非导磁动铁棒9位移距离;所述锥台形铁芯组包括第一铁芯12和第二铁芯13,所述第一铁芯12和第二铁芯13镜像对称分布与所述非导磁动铁棒9两端,所述第一铁芯12和第二铁芯13分别设于所述第一电磁腔2和第二电磁腔3内,所述第一铁芯12尺寸小于所述第二铁芯13。
[0023]
所述动铁部连接头8包括直线轴承14和锥台形铁芯阻挡部15,所述直线轴承14插接与所述锥台形铁芯阻挡部15内通过固定螺栓固定连接,所述直线轴承14同轴心套于与所述与非导磁动铁棒9上。所述第一铁芯12和第二铁芯13锥台面均对向所述锥台形铁芯阻挡部15,所述锥台形铁芯阻挡部15设有锥台形凹槽16。
[0024]
所述智能操控部包括智能控制器18和电源19,所述智能控制器18与所述电磁线圈7和所电子位移计4连接,通过接收电子位移计4的位移信息控制电磁线圈7内电流大小。
[0025]
具体实施时本发明利用电磁感应原理,由两个线圈匝数比为3:8,具体可以为线圈匝数分别为1500
匝和4000匝的电磁线圈驱动动铁部做往复运动。电磁线圈中电流的大小和通断时间是通过智能控制器实现的。电流值是变动的根据负荷自动调整。试验机在频率4.5hz时的电流是0.45安和0.78安,量产后实际数值会远大于实验数值,由于电流的传递速度接近于光速,电磁感应系统的响应时间也非常短约5-10ms,控制精度高。克服了传统摇床频率冲程调节不便、往复速度差小等诸多缺陷。
[0026]
本发明中动铁部的两个锥台形铁芯通过非导磁材料连接。第一电磁线圈和第二电磁线圈的结果参数有差异,通过调节通过两个电磁线圈电流的大小,可以较为方便地调整两个电磁线圈产生磁场的高低。通过智能控制器交替通断通过两个线圈的电流,并使第一线圈产生的磁场对动铁部的吸引力小于第二线圈产生的磁场对动铁部的吸引力。从而达到动铁在向前运动时的加速度小于向后运动时的加速度的目的。实现动铁部及摇床面的往复差速运动。
[0027]
电子位移计向智能控制器传递动铁部的位置信息,通过设置两个线圈交替通断时的位移数值,可设定动铁部和床面的冲程。通过调整通过两个电磁线圈电流的大小,可调整往复运动加速度的大小,相应地也控制了往复运动的频率。
[0028]
实施例2如图1-4所示一种电磁式摇床床头,所述电磁式摇床床头包括壳体1、电磁部、动铁部和智能操控部,所述电磁部和动铁部设于所述壳体1内,所述智能操控部与电磁部连接;所述电磁部包括第一电磁腔2和第二电磁腔3,所述第一电磁腔2和第二电磁腔3之间设有电子位移计4,所述第一电磁腔2和第二电磁腔3均包括电磁圈腔5和动铁部位移腔6,所述电磁圈腔5内均设有电磁线圈7,所述第一电磁腔2内的电磁线圈7匝数大于所述第二电磁腔3内的电磁线圈7匝数,为减小线圈电感,所述电磁线圈7采用并线缠绕法,第一电磁腔2动铁部位移腔6和第二电磁腔3动铁部位移腔6外侧端均设有动铁部连接头8,所述动铁部连接头8同轴心套于所述动铁部上;所述动铁部包括非导磁动铁棒9和锥台形铁芯组,所述锥台形铁芯组与所述非导磁动铁棒9固定连接;所述非导磁动铁棒9的两端连通所述第一电磁腔2和第二电磁腔3后贯穿所述壳体1,所述非导磁动铁棒9的两端与所述伸缩杆10螺纹连接,所述伸缩杆10通过铰链法兰17与所述摇床床面11铰接,所述电子位移计4与所述非导磁动铁棒9中心连接,测量非导磁动铁棒9位移距离;所述锥台形铁芯组包括第一铁芯12和第二铁芯13,所述第一铁芯12和第二铁芯13镜像对称分布与所述非导磁动铁棒9两端,所述第一铁芯12和第二铁芯13分别设于所述第一电磁腔2和第二电磁腔3内,所述第一铁芯12尺寸大于所述第二铁芯13。
[0029]
所述动铁部连接头8包括直线轴承14和锥台形铁芯阻挡部15,所述直线轴承14插接与所述锥台形铁芯阻挡部15内通过固定螺栓固定连接,所述直线轴承14同轴心套于与所述与非导磁动铁棒9上。所述第一铁芯12和第二铁芯13锥台面均对向所述锥台形铁芯阻挡部15,所述锥台形铁芯阻挡部15设有锥台形凹槽16。
[0030]
所述智能操控部包括智能控制器18和电源19,所述智能控制器18与所述电磁线圈7和所电子位移计4连接,通过接收电子位移计4的位移信息控制电磁线圈7内电流大小。
[0031]
具体实施时本发明利用电磁感应原理,由两个线圈匝数比为3:8,具体可以为线圈匝数分别为1500匝和4000匝的电磁线圈驱动动铁部做往复运动。电磁线圈中电流的大小和通断时间是通过
智能控制器实现的。电流值是变动的根据负荷自动调整。试验机在频率4.5hz时的电流是0.45安和0.78安,量产后实际数值会远大于实验数值,由于电流的传递速度接近于光速,电磁感应系统的响应时间也非常短约5-10ms,控制精度高。克服了传统摇床频率冲程调节不便、往复速度差小等诸多缺陷。
[0032]
本发明中动铁部的两个锥台形铁芯通过非导磁材料连接。第一电磁线圈和第二电磁线圈的结果参数有差异,通过调节通过两个电磁线圈电流的大小,可以较为方便地调整两个电磁线圈产生磁场的高低。通过智能控制器交替通断通过两个线圈的电流,并使第一线圈产生的磁场对动铁部的吸引力大于第二线圈产生的磁场对动铁部的吸引力。从而达到动铁在向前运动时的加速度大于向后运动时的加速度的目的。实现动铁部及摇床面的往复差速运动。
[0033]
电子位移计向智能控制器传递动铁部的位置信息,通过设置两个线圈交替通断时的位移数值,可设定动铁部和床面的冲程。通过调整通过两个电磁线圈电流的大小,可调整往复运动加速度的大小,相应地也控制了往复运动的频率。
[0034]
本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在不脱离本发明的原理和宗旨的情况下在本发明的范围内可以对上述实施例进行变化、修改、替换和变型,对其进行简单的组合变化都列为本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1