惯性传感器及其制备方法与流程
1.本技术涉及微机电系统(micro electro mechanical systems,mems)器件技术领域,具体涉及一种惯性传感器及其制备方法。
背景技术:
2.常规的mems惯性传感器有2种加工方案,一种是外延多晶硅,一种是soi技术制备可动结构。外延多晶硅,是需要先沉积牺牲层,再沉积多晶硅种子层后进行外延,牺牲层通过vhf释放掉。这种工艺对于外延多晶硅的应力控制要求比较高,如果应力控制的不好,批量生产的惯性传感器的性能一致性差。soi技术是通过硅/氧化硅键合的方式完成的,对于键合质量的要求比较高,而且由于氧化硅层不导电,对于氧化硅上下层的电互联比较有挑战。
3.申请内容
4.有鉴于此,本技术实施例致力于提供一种惯性传感器及其制备方法,以解决现有技术中批量生产的惯性传感器的性能均一性较差和电互联难度高的问题。
5.本技术第一方面提供了一种惯性传感器的制备方法,包括:提供第一基板,第一基板包括第一导电层;提供第二基板,第二基板包括第一衬底,第一衬底的材料为单晶材料;将第一导电层和第一衬底结合在一起,形成结合界面;形成可动元件,可动元件包括至少部分第一衬底。这样,可以基于第一衬底形成可动元件,由于第一衬底为单晶材料,其厚度精确可控,从而确保了批量生产的惯性传感器的性能均一。
6.在一个实施例中,惯性传感器的制备方法还包括制备第一基板。制备第一基板包括:在第二衬底上制备图形化的第二导电层,图形化的第二导电层包括可动元件锚点;在图形化的第二导电层上制备牺牲层;对牺牲层的第一区域进行刻蚀得到通孔,第一区域在垂直于第二衬底的方向上的正投影落在可动元件锚点上;在牺牲层上制备第一导电层,第一导电层填充通孔。这样得到的第一基板,第一导电层具有完整结构,确保后续形成的结合界面更牢靠。
7.在一个实施例中,在牺牲层上制备第一导电层之前,还包括:对牺牲层的第二区域进行刻蚀得到盲孔,第二区域在垂直于第二衬底的方向上的正投影落在第二导电层外;在牺牲层上制备第一导电层,第一导电层填充通孔的同时还填充盲孔。这样,可以在可动元件朝向固定电极的表面形成止挡结构,从而避免可动元件的振动幅度过大,导致可动元件损坏。
8.在一个实施例中,在牺牲层上制备第一导电层之前,还包括:在盲孔内制备防粘连层。这样,可以避免止挡结构与其下方膜层接触时产生粘连,从而提高产品可靠性。
9.在一个实施例中,第一基板还包括与第一导电层叠置的牺牲层,牺牲层包括通孔,第一导电层填充通孔。形成可动元件,可动元件包括至少部分第一衬底包括:对第二基板进行减薄至剩余部分第一衬底;从剩余的部分第一衬底表面进行图形化刻蚀至露出牺牲层;腐蚀掉部分牺牲层,以形成可动元件。根据本实施例,利用未经图形化的第一导电层和第一
衬底进行结合,形成结合界面,确保结合界面强度,同时降低了从第一衬底表面进行图形化处理的过程中产生破片的风险,提高产品良率。
10.在一个实施例中,在牺牲层上制备第一导电层,第一导电层填充通孔之后,还包括:从第一导电层表面向下进行刻蚀形成凹槽,至露出图形化的第二导电层和通孔中的第一导电层,以得到图形化的第一导电层。这样得到的第一基板,第一导电层具有图形化结构,利于释放应力。
11.在一个实施例中,第一基板包括凹槽,凹槽贯穿第一导电层,以形成图形化的第一导电层。形成可动元件,可动元件包括至少部分第一衬底包括:对第二基板进行减薄至剩余部分第一衬底;从剩余的部分第一衬底表面进行图形化刻蚀至露出凹槽,以形成可动元件。根据本实施例,利用图形化的第一导电层和第一衬底进行结合,形成结合界面,使得表面结合过程中产生的应力可以通过图形化结构得到释放,从而提升了产品良率。
12.在一个实施例中,第一导电层和第二导电层的材料相同;和/或第二基板为硅片。由于相同材料之间的结合力较好,因此通过采用相同的材料制备第一导电层和第二导电层,可以确保二者之间的界面更牢靠。
13.本技术第二方面提供了一种惯性传感器,包括:可动元件,可动元件包括叠置的第一衬底和第一导电层,第一衬底的材料为单晶材料。
14.在一个实施例中,惯性传感器还包括第二导电层,第二导电层位于第一导电层的背离第一衬底的一侧,第二导电层和第一导电层之间具有间隙。
15.在一个实施例中,第一导电层和第二导电层的材料相同。
16.在一个实施例中,第一导电层的朝向第二导电层的表面设置有止挡结构,止挡结构用于限制可动元件在垂直于第二导电层的方向上的位移。
17.在一个实施例中,止挡结构在垂直于第二导电层的方向上的正投影落在第二导电层外。
18.在一个实施例中,第一导电层的朝向第二导电层的表面设置有凸起,凸起形成止挡结构。
19.在一个实施例中,止挡结构的表面具有防粘连层。
20.在一个实施例中,防粘连层的材料包括氮化硅。
21.在一个实施例中,第一导电层朝向第二导电层的表面设置有突出部;第二导电层包括可动元件锚点,突出部与可动元件锚点连接。
22.在一个实施例中,第二导电层还包括两个固定电极,分别位于可动元件锚点的相对两侧。
23.根据本技术提供的惯性传感器及其制备方法,利用界面结合方式取代外延多晶硅方式,降低了结合界面的应力,提高了批量生产的惯性传感器的性能一致性。与此同时,相比于现有技术中的soi技术而言,界面结合双方分别为第一导电层和单晶材料层,即在界面结合的同时便实现了电连接,降低了电互联难度。
附图说明
24.图1为本技术第一实施例提供的惯性传感器的制备方法流程图。
25.图2a~图2g为本技术第一实施例提供的图1所示惯性传感器的制备方法的执行过
程中形成的器件结构示意图。
26.图3a~图3c为本技术第二实施例提供的图1所示惯性传感器的制备方法的执行过程中形成的器件结构示意图。
27.图4a和图4b为本技术第三实施例提供的图1所示惯性传感器的制备方法的执行过程中形成的器件结构示意图。
28.图5a~图5c为本技术第四实施例提供的图1所示惯性传感器的制备方法的执行过程中形成的器件结构示意图。
具体实施方式
29.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
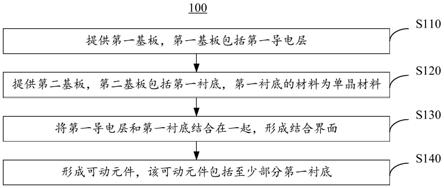
30.图1为本技术第一实施例提供的惯性传感器的制备方法流程图。如图1所示,惯性传感器的制备方法100包括:
31.步骤s110,提供第一基板,第一基板包括第一导电层。
32.参阅图2a,第一基板10包括至少一个膜层,该至少一个膜层包括第一导电层11。第一导电层11位于第一基板10的顶层或底层,其可以是图形化的膜层,也可以是未经图形化的完整膜层。第一导电层11的材料包括金属或半导体。在一个示例中,第一导电层11的材料为多晶硅。
33.步骤s120,提供第二基板,第二基板包括第一衬底,第一衬底的材料为单晶材料。
34.参阅图2b,第二基板20包括至少一个膜层,该至少一个膜层包括单晶材料的第一衬底21。第一衬底21位于第一基板10的顶层或底层。在一个示例中,第一衬底21为单晶硅片,厚度一般为725微米。单晶硅片的结晶质量好,整片晶圆的一致性好,批量生产更容易保证良率。在一个示例中,第一衬底21为低阻片,其电阻率大约为0.01欧姆/厘米。
35.步骤s130,将第一导电层和第一衬底结合在一起,形成结合界面。第一导电层11的厚度相对于第一衬底21的厚度而言可忽略。
36.参阅图2c,第一导电层11和第一衬底21可以采用键合或焊接等形式结合在一起,以形成结合界面。在一示例中,第二基板20为低阻单晶硅片。这种情况下,在执行步骤s130之前,需要对第二基板20进行掺杂,以保证电导通性能。
37.步骤s140,参阅图2g,形成可动元件210,该可动元件210包括至少部分第一衬底21。至少部分第一衬底21包括完整的第一衬底21或经过减薄后剩余的第一衬底21。
38.根据本实施例提供的惯性传感器的制备方法,利用界面结合方式取代外延多晶硅方式,降低了结合界面的应力,提高了批量生产的惯性传感器的性能一致性。与此同时,相比于现有技术中的soi技术而言,界面结合双方分别为第一导电层和单晶材料层,即在界面结合的同时便实现了电连接,降低了电互联难度。
39.根据图1所示惯性传感器的制备方法100适用于制备加速度传感器,包括x轴加速度传感器,y轴加速度传感器,z轴加速度传感器或其任意组合;或者陀螺仪,本技术不予限定。
40.下面以z轴加速度传感器为例,通过四种具体实施方式为例,结合相关附图说明图1所示惯性传感器的制备过程。
41.实施例一,参阅图2a~图2g。
42.第一步,制备第一基板。
43.首先,参阅图2a,在第二衬底15上制备图形化的第二导电层13,图形化的第二导电层13包括固定电极131和可动元件锚点132,即第二导电层13具有图形化结构。可动元件锚点132用于通过支撑柱与第一导电层11连接,以支撑可动元件。固定电极131包括两个,分别位于可动元件锚点132的两侧,例如如图2a所示的左侧和右侧。在一示例中,第二导电层13还包括固定电极锚点133,用于连接固定电极131,以在合适位置形成引出端子。第二衬底15的材料可以是玻璃或半导体。在一示例中,第二衬底15为硅片。第二导电层13可以是金属层或半导体层。在一示例中,第二导电层13为多晶硅层。在一个实施例中,在制备第二导电层13之前,在第二衬底15表面形成缓冲层14。缓冲层14例如为二氧化硅层。
44.其次,继续参阅图2a,在图形化的第二导电层13上制备牺牲层12。牺牲层12可通过热生长或者淀积的方式形成,牺牲层12例如为二氧化硅层。
45.接着,继续参阅图2a,对牺牲层12的第一区域进行刻蚀得到通孔120,第一区域在垂直于第二衬底15的方向上的正投影落在可动元件锚点132上。这样,可动元件锚点132通过通孔120暴露出来。
46.然后,继续参阅图2a,在牺牲层12上制备第一导电层11,第一导电层11填充通孔120,以形成突出部,该突出部作为支撑柱和可动元件锚点132连接。在一示例中,第一导电层11和第二导电层13的材料相同,例如均为多晶硅。由于相同材料的性质相同,因此利用相同的材料形成第一导电层11和第二导电层13,可使得二者之间的粘附力更强,确保结构更稳固。在一个实施例中,得到第一导电层11之后,还需要对第一导电层11进行平坦化处理,例如通过化学机械研磨的方式对第一导电层11进行平坦化处理,从而为后续和第二基板20进行表面结合做准备。至此得到第一基板10。
47.第二步,参阅图2b,提供硅片以作为第二基板20。这种情况下,第二基板20仅包括第一衬底21,并且其厚度精确可控。
48.第三步,参阅图2c,将第一导电层11和第一衬底21结合在一起,形成结合界面。例如,先采用晶圆键合机,利用范德华力,将第一基板10的第一导电层11和第二基板20的第一衬底21进行预键合;然后将预键合后的器件置于600~1100度的环境中进行退火,实现熔融键合,从而得到高质量的结合界面。这种情况下,第一导电层11和第一衬底21通过键合实现电连接,相比于生长过程实现的连接而言,无晶粒晶向等影响所导致的应力梯度问题,可靠性更高。与此同时,第一导电层11和第一衬底21均为整层结构,没有图形化,进一步确保了键合质量,适用于批量生产。
49.第四步,形成可动元件。
50.具体而言,首先,参阅图2d,对第二基板20进行减薄至剩余部分第一衬底21。在本实施例中,第二基板20仅包括第一衬底21,因此该步骤相当于对第一衬底21进行减薄至剩余部分第一衬底21。在一示例中,减薄后剩余的第一衬底21的厚度为20~80微米。
51.其次,参阅图2e,在剩余的部分第一衬底21表面制备布线层30。该布线层30用于实现电气连接和/或形成密封圈。例如,在本实施例中,布线层30包括密封圈311和引出端子
312。引出端子312的数量为多个,分别连接可动元件210、左侧的固定电极131和右侧的固定电极131。
52.具体而言,采用沉积工艺在剩余的部分第一衬底21表面制备金属层,通过光刻和刻蚀工艺图形化该金属层,以形成布线层30。例如,可以在金属层上形成光刻胶层,该光刻胶层的厚度可以是1~3微米;之后通过光刻和腐蚀工艺对金属层进行图形化;之后可以采用氧气等离子体方式去除该光刻胶层。在一示例中,金属层的材料包括铝,其厚度约为1微米,其形成方式可以是溅射。
53.接着,参阅图2f,从剩余的部分第一衬底21表面进行图形化刻蚀至露出牺牲层12。该图形化结构后续经释放后形成可动元件210。该图形化结构和第二导电层13中的图形化结构相对应。例如,如图2f所示,第二导电层13包括两个固定电极131,分别位于可动元件锚点132的左侧和右侧。相应地,可动元件210的图形化结构包括分别与该两个固定电极131对应的两个可动电极,该两个可动电极一体成型。
54.然后,参阅图2g,腐蚀掉部分牺牲层12,以使具有图形化结构的叠置的剩余的第一衬底21和第一导电层11形成可动元件210。例如,采用氢氟酸蒸汽腐蚀掉部分牺牲层12,以形成可动元件210。
55.至此,得到z轴加速度传感器。其工作原理是:通过可动元件210中的可动电极和固定电极131之间的距离来改变电容,借助电容的改变来量测z轴方向上的加速度。
56.实施例二,参阅图3a~图3c。该实施例二和实施例一的区别仅在于,对比图2g和图3c可见,在本实施例中还包括在可动元件210下方形成止挡结构211的步骤,止挡结构用于限制可动元件210在垂直于第二导电层13的方向上的位移。
57.具体而言,参阅图3a,在第一步制备第一基板10的过程中,制备完成牺牲层12之后,也即在牺牲层12上制备第一导电层11之前,还包括:在牺牲层12的第二区域进行刻蚀得到盲孔121,第二区域在垂直于第二衬底15的方向上的正投影落在第二导电层13外。
58.这种情况下,参阅图3b,在牺牲层12上制备第一导电层11,第一导电层11填充通孔120的同时还填充盲孔121。
59.接着执行实施例一中的第二步、第三步和第四步,得到如图3c所示的z轴加速度传感器。可动元件210包括叠置的第一导电层11和第一衬底21,第一导电层11背离第一衬底21的表面具有凸起,以形成止挡结构211,用于防止可动元件210的振动幅度过大,导致损坏。
60.实施例三,参阅图4a和图4b。该实施例三和实施例二的区别仅在于,对比图3c和图4b可见,在本实施例中还包括在止挡结构211的下表面形成防粘连层212的步骤。
61.具体而言,参阅图4a,在第一步中在牺牲层12上制备第一导电层11之前,也即在得到盲孔121之后,还包括:在盲孔121内制备防粘连层212。防粘连层212的厚度小于盲孔121的高度。在一示例中,防粘连层212的材料为氮化硅。然后再制备第一导电层11,第一导电层11填充通孔120和盲孔121的剩余部分。
62.接着执行实施例一中的第二步、第三步和第四步,得到如图4b所示的z轴加速度传感器。可动元件210包括叠置的第一导电层11和第一衬底21,第一导电层11背离第一衬底21的表面具有凸起,以形成止挡结构211,止挡结构211的表面具有防粘连层212。防粘连层212用于避免止挡结构210与其下方膜层,例如缓冲层14接触时相互粘结。
63.实施例四,参阅图5a和图5c。该实施例四和实施例一的区别在于第一基板的结构
不同。相应地,第四步中形成可动元件210的过程也不同。
64.具体而言,第一步,制备第一基板。
65.制备第一基板30的步骤和实施例一中的过程大致相同,区别仅在于在得到如图2a所示的器件结构之后,还包括:参阅图5a,从第一导电层11表面向下进行刻蚀形成凹槽q,至露出图形化的第二导电层13和通孔中的第一导电层11,以得到图形化的第一导电层11。至此,得到第一基板30。
66.接着执行实施例一中的第二步和第三步,以得到图5b所示的器件,该器件中,第一导电层11和第一衬底21之间通过表面结合,形成结合界面。第一基板30中的凹槽q在第一导电层11和第一衬底21之间形成腔体。其中,在第三步中进行键合时,由于第一导电层11在本实施例中为图形化结构,该图形化结构可以在键合的过程中起到应力释放的作用,从而相比于实施例一中未经图形化的整层结构进行键合而言,最终器件的一致性更好。
67.第四步,形成可动元件。
68.具体而言,首先,参阅图5c,对第二基板20进行减薄至剩余部分第一衬底21。在本实施例中,第二基板20仅包括第一衬底21,因此该步骤相当于对第一衬底21进行减薄至剩余部分第一衬底21。
69.其次,继续参阅图5c,在剩余的部分第一衬底21表面制备布线层30。制备布线层30的步骤和实施例一中制备布线层30的步骤相同,这里不再赘述。
70.接着,继续参阅图5c,从剩余的部分第一衬底21的表面进行图形化刻蚀至露出凹槽q,以形成可动元件210,该可动元件210包括减薄后的第一衬底21。
71.至此,得到z轴加速度传感器。
72.本技术还提供了一种惯性传感器。如图2g、图3c、图4b和图5c所示,该惯性传感器包括可动元件210,可动元件210包括叠置的第一衬底21和第一导电层11。第一衬底21的材料和第一导电层11的材料不同。在一示例中,第一衬底21的材料为单晶材料,第一导电层11的材料为多晶硅材料。
73.在一个实施例中,如图2g、图3c和图4b所示,惯性传感器还包括第二导电层13,第二导电层13位于第一导电层11的背离第一衬底21的一侧,第二导电层13和第一导电层11之间具有间隙,并通过支撑柱连接。第二导电层13包括两个固定电极131和可动元件锚点132,两个固定电极131分别位于可动元件锚点132的左侧和右侧。可动元件210包括两个可动电极,该两个可动电极分别和两个固定电极131正对,以形成电容结构。
74.在一个实施例中,第一导电层11和第二导电层13的材料相同,例如均为多晶硅。由于相同材料的性质相同,使得两个膜层间的结合力更大,确保可靠性。
75.在一个实施例中,如图3c和图4b所示,第一导电层11的朝向第二导电层13的表面包括止挡结构211,止挡结构211在垂直于第二导电层13的方向上的正投影落在第二导电层13外。在一个实施例中,如图4b所示,止挡结构211的表面具有防粘连层212。在一示例中,防粘连层212的材料为氮化硅。
76.根据本技术实施例提供的惯性传感器可以采用上述任一实施例提供的制备方法得到,产品实施例中未具体描述的细节可以参阅制备方法部分,这里不再赘述。
77.提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本技术。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义
的一般原理可以应用于其他方面而不脱离本技术的范围。因此,本技术不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
78.应当理解,本技术实施例描述中所用到的限定词“第一”、“第二”、“第三”、“第四”、“第五”和“第六”仅用于更清楚的阐述技术方案,并不能用于限制本技术的保护范围。
79.为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本技术的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1