一种舰载稳定装置的制作方法
[0001]
本实用新型涉及一种舰载稳定平台,特别是一种3ucu+pu三自由度的舰载稳定平台。
背景技术:
[0002]
对于有定向要求的仪器仪表,如果承载平台本身的姿态在不断的发生变化,就会极大的影响仪器仪表的正常使用,比如机载吊舱,车载或舰载定向跟踪设备等,这种场合就必须要用到稳定平台。将需要稳定的仪器仪表放置在稳定平台工作面上,依靠稳定平台的反向运动抵消承载平台(舰载、机载和车载)本身姿态变化对仪器仪表的影响。
技术实现要素:
[0003]
本实用新型其目的就在于提供一种舰载稳定装置,解决了电动缸驱动上平台做横摇和纵摇运动,稳定安装在上平台的仪器仪表,提高了稳定平台的运动精度的问题。
[0004]
为实现上述目的而采取的技术方案是,一种舰载稳定装置,包括上平台,所述上平台的下端面经3个ucu支链与下平台的上端面连接,所述上平台的下端面上还连接有1个pu支链,pu支链通过立柱与下平台的上端面固定连接;所述的3个ucu支链均包括有电动缸,电动缸的缸体上安装有伺服电机,电动缸的缸体经下铰链与下平台的上端面固联,电动缸的推杆经上铰链与上平台的下端面固联;所述pu支链包括固定在立柱上端面上的轴套,轴套内配合安装有花键轴,花键轴的下端固定有限位块,花键轴的上端固定有支承座,支承座经十字铰链与上平台的下端面固联,所述支承座的下端固定有外罩,外罩的下端套装在立柱上端的外圆侧壁上,所述外罩与立柱之间设有密封圈;所述上平台的下端面上还安装有捷联惯导装置。
[0005]
在本实用新型中,所述上铰链、下铰链和十字铰链均采用万向铰链作为运动副。
[0006]
在本实用新型中,所述电动缸的推杆和缸体之间采用圆柱铰链构成运动副。
[0007]
在本实用新型中,所述花键轴和轴套之间采用平移铰链构成运动副;花键轴为外圆侧壁上沿圆周均布6个键,轴套相对应开有6个均布的键槽,二者相互配合使用只允许上平台竖直升降。
[0008]
在本实用新型中,每一个所述的ucu支链包括1个电动缸,在1个电动缸的缸体上的分别固联1个下铰链和1个伺服电机,电动缸的推杆的上端固联1个上铰链;所述的3个ucu支链沿圆周均布,且分别与上平台和下平台固联,通过3个电动缸的推杆的伸缩驱动上平台横摇、纵摇和升降。
[0009]
在本实用新型中,所述的上平台抬升到电动缸行程的一半并固定时,上平台的运动范围最大,这时由上平台、下平台和3个ucu支链构成一个并联机构。
[0010]
有益效果
[0011]
与现有技术相比本实用新型具有以下优点。
[0012]
1. 本实用新型与采用串联机构实现的稳定平台相比,没有轴系累计误差,运动精
度高;
[0013]
2. 本实用新型与采用并联机构实现的6自由度stewart平台相比,减少了分支个数,降低了生产成本,可以提高产品市场竞争力;
[0014]
3. 本实用新型中上铰链、下铰链和十字铰链内置精密轴承实现万向铰链,替代传统的球铰链,提高了稳定平台的运动精度。
附图说明
[0015]
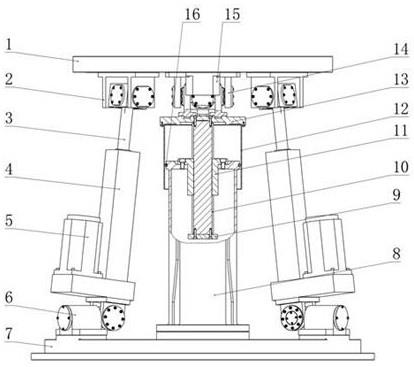
图1为本实用新型的局部剖面图;
[0016]
图2为本实用新型安装负载示意图;
[0017]
图3为本实用新型外形示意图;
[0018]
图4为本实用新型外形示意图;
[0019]
图5为本实用新型电动缸示意图;
[0020]
图6为本实用新型上铰链示意图;
[0021]
图7为本实用新型下铰链示意图;
[0022]
图8为本实用新型十字铰链示意图;
[0023]
图9为本实用新型花键轴个件示意图;
[0024]
图中所示:1.上平台,2.上铰链,3.推杆,4.缸体,5.伺服电机,6.下铰链,7.下平台,8.立柱,9.限位块,10.花键轴,11.轴套,12.外罩,13.支承座,14.十字铰链,15.捷联惯导装置,16.密封圈,17.仪器仪表。
具体实施方式
[0025]
为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本实用新型。
[0026]
如图1-图7所示的一种舰载稳定装置,包括上平台1,所述上平台1的下端面经3个ucu支链与下平台7的上端面连接,所述上平台1的下端面上还连接有1个pu支链,pu支链通过立柱8与下平台7的上端面固定连接;所述的3个ucu支链均包括有电动缸,电动缸的缸体4上安装有伺服电机5,电动缸的缸体4经下铰链6与下平台7的上端面固联,电动缸的推杆3经上铰链2与上平台1的下端面固联;所述pu支链包括固定在立柱8上端面上的轴套11,轴套11内配合安装有花键轴10,花键轴10的下端固定有限位块9,花键轴10的上端固定有支承座13,支承座13经十字铰链14与上平台1的下端面固联,所述支承座13的下端固定有外罩12,外罩12的下端套装在立柱8上端的外圆侧壁上,所述外罩12与立柱8之间设有密封圈16;所述上平台1的下端面上还安装有捷联惯导装置15。
[0027]
所述上铰链2、下铰链6和十字铰链14均采用万向铰链作为运动副。
[0028]
所述电动缸的推杆3和缸体4之间采用圆柱铰链构成运动副。
[0029]
所述花键轴10和轴套11之间采用平移铰链构成运动副;花键轴10为外圆侧壁上沿圆周均布6个键,轴套11相对应开有6个均布的键槽,二者相互配合使用只允许上平台竖直升降,限位块9固定在花键轴10的下端,防止花键轴10与轴套11脱开。
[0030]
每一个所述的ucu支链包括1个电动缸,在1个电动缸的缸体4上的分别固联1个下铰链6和1个伺服电机5,电动缸的推杆3的上端固联1个上铰链2;所述的3个ucu支链沿圆周
均布,且分别与上平台1和下平台7固联,通过3个电动缸的推杆3的伸缩驱动上平台1横摇、纵摇和升降。
[0031]
所述的上平台1抬升到电动缸行程的一半并固定时,上平台1的运动范围最大,这时由上平台1、下平台7和3个ucu支链构成一个并联机构。
[0032]
本实用新型中,所述上铰链2、推杆3、缸体4、伺服电机5和下铰链6组成1个ucu支链;所述十字铰链14、支承座13、花键轴10、轴套11和限位块9组成pu支链;其中推杆3、缸体4和伺服电机5组成电动缸;以下平台7为定基座,立柱8下端用螺钉固定在下平台7上端面,立柱8上端用螺钉固定轴套11;pu支链的十字铰链14与上平台1用螺钉固联,pu支链的花键轴10与轴套11配合,将上平台1的自由度限制为横摇、纵摇和升降;所述的3个ucu支链的下铰链6分别与下平台7固定,3个ucu支链的上铰链2分别与上平台1固定,通过3个电动缸的推杆的伸缩实现横摇和纵摇;所述外罩12用螺钉固定在支承座13的下端,密封圈16套在立柱8的上端外圆侧壁上,外罩12与密封圈16相互配合保护花键轴10以及立柱8内部的其它元器件;所述捷联惯导装置用于舰船姿态信号的实时测量。
[0033]
在本实用新型的上平台1上端面安装了待测试的仪器仪表17,将下平台7固定在某个舰船甲板或汽车车架上,在舰船或汽车行驶的过程中,稳定平台控制器会根据捷联惯导装置实时反馈的姿态信息控制3个电动缸的伸缩变化,以稳定仪器仪表最终的姿态。
[0034]
本实用新型中出现的字母缩写解释如下:u代表universal joint,表示万向铰;c代表cylindrical joint,表示圆柱铰链;p代表prismatic joint,表示平移铰链,s代表spherical joint,表示球铰;本实用新型是在上平台1和下平台7之间安装3个ucu支链和1个pu支链,实现上平台1横摇和纵摇的功能;具体为:
[0035]
1、将下平台7设为定基座,将轴套11通过立柱8固定在下平台7,pu支链中的花键轴10与轴套11配合使用形成移动副,实现pu支链中花键轴10和十字铰链14整体上下运动;在花键轴10的上端固定有支承座13和十字铰链14,十字铰链14为万向铰链,其上端固定有上平台1,最终上平台的运动范围变位横摇、纵摇和升降;
[0036]
2、所述的3个沿圆周均布的ucu支链的上端与上平台1固联,其下端与下平台7固联,通过电动缸的推杆3的伸缩驱动上平台实现横摇、纵摇和升降功能;
[0037]
3、本实用新型中的升降功能在正常开始工作时会锁定,在稳定平台结束工作时,整个上平台会降低到最低点,降低整个设备的重心高度,提升设备使用安全性。
[0038]
本实用新型工作原理是:1、将轴套11固定在立柱8上,立柱8安装在下平台7上,通过pu支链将上平台1相对下平台7的运动关系确定下来,即上平台1相对下平台7有横摇,纵摇和升降3个自由度;
[0039]
2、将3个ucu支链沿圆周均布在上平台1和下平台7之间,利用电动缸的伸缩功能驱动上平台1横摇、纵摇和升降;
[0040]
3、本实用新型的伸缩功能仅在开始和结束工作时使用,在开始工作前3个电动缸同时将上平台1抬起至某一高度,上平台1升至电动缸总行程的一半时,上平台1的摇摆范围最大;在结束工作后,3个电动缸同时收缩至最短长度,伺服电机5断电并抱闸将上平台1锁定至最低位置,降低整个设备的重心高度,提高稳定平台安全性;
[0041]
4、将下平台7固定在使用承载体(机载,舰载或车载)基座处,利用上平台下端面安装的捷联惯导装置实时向控制器输入姿态信息,控制器根据姿态信息和稳定平台的固有几
何参数反解电动缸的伸缩距离,实现实时稳定被测仪器仪表的任务。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1