雷达传感器、可更换的雷达传感器装置、现场设备和容器的制作方法
[0001]
本发明涉及被构造用于工业环境的测量装置。特别地,本发明涉及雷达传感器、可更换的雷达传感器装置、具有雷达传感器装置的现场设备以及其内安装有现场设备的容器。
背景技术:
[0002]
在过程工业、自动化技术和制造技术中,现场设备用于测量诸如填充物位、极限物位、流量、温度或速度等过程变量。这种现场设备通过数字接口(必要时通过无线接口)或者通过现场设备上的直接的用户输入进行操作和参数化。这种接口例如为hart、io-link、蓝牙或nfc。现场设备上的直接的用户输入通过用户经由按键、磁性元件等与现场设备的交互来进行。为此,可以使用特定操作模块,所述特定操作模块被构造为能够从现场设备上拆下并通过现场设备提供能量。例如,可通过四个按键来执行用户输入。此外,还可存在如下显示器,该显示器向用户显示已完成的输入,并从而输出对用户输入的反馈。
技术实现要素:
[0003]
本发明的目的是简化现场设备的操作。
[0004]
该目的通过独立权利要求的主题实现。在从属权利要求和以下说明中给出本发明的进一步改进。
[0005]
本发明的第一方面涉及一种雷达传感器,雷达传感器具有第一雷达传感器装置和第二雷达传感器装置。第一雷达传感器装置被构造用于在第一方向上并例如在容器中测量介质的填充物位。第一雷达传感器装置还可以被构造用于测量极限物位、开放水域的水平面和/或介质的流速。后者例如通过多普勒测量实现,该多普勒测量利用在介质上倾斜地出现的并例如被表面上的波纹反射的雷达信号进行的。
[0006]
第二雷达传感器装置被构造用于在第二方向上(例如,在容器外部)监测雷达传感器的环境。例如,第二雷达传感器装置与第一雷达传感器装置监测不同的空间区域。
[0007]
在本发明的上下文中,术语“雷达传感器的环境”精确地包含不存在被填充物位测量装置测量的填充材料表面的空间区域。
[0008]
雷达传感器可以被构造为使用第二雷达传感器装置的测量数据,以便影响第一雷达传感器装置的测量。这方面的应用示例为堆叠的ibc容器的情况或者是当有人靠近第二雷达传感器装置时提高第一雷达传感器装置的测量速率的情况。根据一实施例,雷达传感器被构造为用于工业环境中的过程自动化。术语“工业环境中的过程自动化”可理解为子技术领域,包括无人参与的用于机器和设备的操作的所有措施。过程自动化的一个目标是在化学、食品、制药、石油、造纸、水泥、航运或矿业等领域中使工厂的各个部件之间的交互自动化。为此,可使用大量的传感器,这些传感器尤其适配于过程工业的诸如机械稳定性、对于污染物的不敏感性、极端温度和极端压力等特定要求。通常将传感器的测量值传送到控制中心,在控制中心中可以监测诸如填充物位、极限物位、流量、压力或密度等过程参数,并
可以手动或自动更改整个工厂的设置。
[0009]
工业环境中的过程自动化的一个子领域涉及物流自动化。在物流自动化领域中,借助于距离传感器和角度传感器使在建筑物内或在单个物流设备内的过程自动化。典型的应用例如为用于以下领域的物流自动化系统:机场的办理行李和货物托运手续领域、交通监控领域(收费系统)、贸易领域、包裹配送领域或建筑物安全(访问控制)领域。先前列出的示例的共同之处在于,各个应用端都需要将存在检测与对象大小和位置的精确测量结合起来。为此,可以使用基于利用激光、led、2d相机或3d相机的光学测量方法的传感器,该传感器根据传播时间(time of fligh,tof)原理检测距离。
[0010]
工业环境中的过程自动化的另一子领域涉及工厂自动化/制造自动化。在诸如汽车制造业、食品制造业、制药业或一般包装行业等许多行业中,都可以见到这种应用实例。工厂自动化的目的是使通过机器、生产线和/或机器人执行的货物生产自动化,即,在没有人工参与的情况下运行。在此使用的传感器以及在检测对象的位置和大小时对于测量精度的特定要求与上述物流自动化示例中的传感器和特定要求相当。
[0011]
根据一实施例,第一雷达传感器装置被构造为在第一方向上发射用于测量填充物位的第一雷达测量信号。第二雷达传感器装置被构造为在与第一方向不同的第二方向上发射用于监测雷达传感器的环境的第二雷达测量信号。
[0012]
例如,第一方向和第二方向形成大于90
°
的角度。根据一实施例,该角度为180
°
,使得两个雷达测量信号在相反的方向上发射。
[0013]
根据一实施例,雷达传感器具有测量装置壳体,其中第一雷达传感器装置和/或第二雷达传感器装置布置在测量装置壳体中。
[0014]
特别地,第二雷达传感器装置以穿过壳体壁的方式朝向待监测的雷达传感器的环境发射其测量信号。
[0015]
根据另一实施例,第二雷达传感器装置被构造为识别用户的手势,其中雷达传感器,并尤其是雷达传感器的处理器或另一控制单元被构造为使用该手势来控制第一雷达传感器装置。
[0016]
根据另一实施例,第二雷达传感器装置被构造为识别容器外部的干扰反射体,其中,雷达传感器或其控制单元被构造为使用对干扰反射体的认知来辨识由第一雷达传感器装置检测的干扰反射。因此,尤其可以使用通过第二雷达传感器装置检测到的干扰反射体的位置数据,以便在由第一雷达传感器装置检测的回波曲线中识别干扰反射体的反射,并从而有助于辨识有用的回波。
[0017]
容器外部的干扰反射体例如可以是相邻容器的壁,并且雷达传感器可以被构造为识别该相邻容器堆叠在其自身的容器上。为此,控制单元例如获知距另一容器底侧的可预期的距离。
[0018]
根据另一实施例,第二雷达传感器装置被构造为识别靠近雷达传感器的用户。在此,雷达传感器被构造为使用对用户的靠近的认知来控制雷达传感器的显示器或背光。
[0019]
例如,当用户靠近雷达传感器时,开启背光或显示器。
[0020]
根据另一实施例,第二雷达传感器装置被构造为检测容器的开口打开还是关闭。如果确定容器的开口是打开的,则雷达传感器可以改变第一雷达传感器装置的测量速率,例如,增大(或减小)测量速率。另一方面,如果检测到容器的开口是关闭的,则可以相应地
设置不同的测量速率。
[0021]
松散材料流能够通过打开的容器开口引入,当它横穿测量雷达波束时,可能会使测量结果失真。因为测量结果很可能不正确,所以由于识别出容器的开口是打开的(或关闭的)而可以限制测量速率,或是可以完全暂停测量。此外,可以向控制中心的用户信号通知这种情况。
[0022]
根据另一实施例,第二雷达传感器装置可以用于监测在填充容器和/或填充开放的松散材料堆时液体流或松散材料流所横穿的可定义的空间区域。特别地,可以通过指定角度和/或通过指定距第二雷达传感器装置的最小和/或最大距离来定义该空间区域。
[0023]
根据另一实施例,可以基于连接到第二雷达传感器的第二评估装置来识别液体流或松散材料流在定义的空间区域中的存在。
[0024]
根据另一实施例,在控制第一雷达传感器装置的工序时,使用液体流或松散材料流在定义的空间区域中的存在。特别地,在定义的空间区域中存在液体流或松散材料流时,可以增加或减小第一雷达传感器的测量重复率。在定义的空间区域中存在液体流或松散材料流时,还可以停用第一雷达传感器装置。由此,可以防止错误测量并节省能量。
[0025]
根据另一个实施例,在评估第一雷达传感器装置的检测信号时,可以使用液体流或松散材料流在定义的空间区域中的存在。由此,可以防止错误测量。
[0026]
根据另一实施例,第二雷达传感器装置被构造为通过用户的触摸或叩击来激活(即,从睡眠模式中唤醒)。
[0027]
为此,可以设置相应的压力传感器或电容传感器。也可以设置有开关。
[0028]
根据另一实施例,第一雷达传感器装置是调频连续波(fmcw:frequency modulated continuous wave)雷达传感器装置或脉冲雷达传感器装置。第二雷达传感器装置可以是线性调频序列传感器装置、fmcw雷达传感器装置或脉冲多普勒雷达传感器装置。
[0029]
根据另一实施例,第一雷达传感器装置和第二雷达传感器装置的发射信号的频率不同。例如,第一雷达传感器装置在75ghz和85ghz之间的频率范围内工作,并且第二雷达传感器装置在57ghz和64ghz之间的频率范围内工作。这可以简化设备的批准。
[0030]
根据另一实施例,第二雷达传感器装置被设计为可更换的。在此,当第二雷达传感器装置例如通过插接或螺接连接到现场设备时,现场设备被构造为精确地评估根据本发明的第二雷达传感器装置的信息。
[0031]
另一方面涉及一种可能可更换的雷达传感器装置,该雷达传感器装置被构造为监测现场设备的环境并安装在现场设备的测量装置壳体上或壳体中。雷达传感器装置例如为现场设备的也可以监测现场设备的环境的操作模块和/或显示模块。雷达传感器装置可以具有接口,该接口用于在雷达传感器装置安装到现场设备上时将通过环境监测获得的数据传输到现场设备。
[0032]
另一方面涉及一种具有上述和下述的可能可更换雷达传感器装置的现场设备。
[0033]
另一方面涉及一种安装有上述和下述的现场设备的容器。例如,将现场设备旋拧到容器开口中。现场设备的第一传感器装置可以为雷达传感器装置、超声传感器装置、压力传感器装置或电容或振动传感器装置,该第一传感器装置例如位于雷达传感器的面对过程的一侧,且第二雷达传感器装置位于背离过程的相对侧,以便其可以监测容器外部的环境。
[0034]
在下文中,将参考附图说明本发明的实施例。如果在附图中使用相同的附图标记,
则它们表示相同或相似的元件。附图中的表示是示意性的,并且没有按比例绘制。
附图说明
[0035]
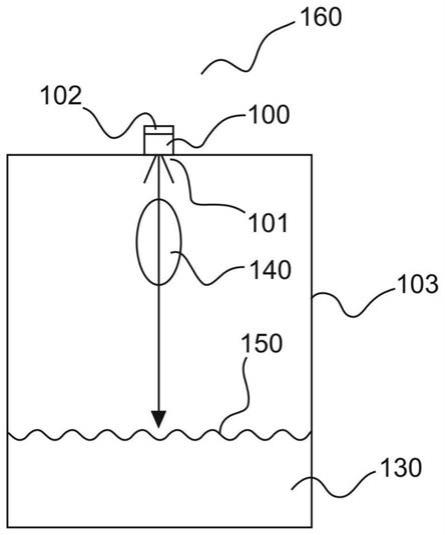
图1示出了安装有现场设备的容器。
[0036]
图2a示出了雷达传感器形式的现场设备。
[0037]
图2b示出了第一雷达传感器装置和第二雷达传感器装置的辐射方向。
[0038]
图2c示出图2a的具有另一辐射方向的第二雷达传感器装置的现场设备。
[0039]
图2d示出了根据图2c的辐射方向的角度。
[0040]
图3示出了根据另一实施例的现场设备。
[0041]
图4示出了两个内部安装有现场设备的容器。
[0042]
图5示出了具有安装在容器开口下方的现场设备的容器。
[0043]
图6示出了手势识别的示例。
[0044]
图7a示出了操作模块形式的可更换雷达传感器装置的立体图和侧视图。
[0045]
图7b示出了用于手势识别的可更换雷达传感器装置。
具体实施方式
[0046]
图1示出了具有容器开口的容器103,在容器中布置有现场设备100。现场设备100例如是具有第一雷达传感器装置101和第二雷达传感器装置102的雷达传感器。
[0047]
现场设备100可以被构造用于非触摸地测量填充物位。然而,它也可以被构造成时域反射(tdr)传感器或振动传感器的形式。在后一种情况下,现场设备检测极限物位。
[0048]
基本上,现场设备100还可以是具有用于监测环境的“第二”雷达传感器装置102的压力传感器或流量传感器。
[0049]
第一雷达传感器装置例如通过朝向填充材料表面150发射雷达信号140,使雷达信号在填充材料表面上反射并借助第一雷达传感器装置101接收雷达信号来确定容器103中的填充材料或介质130的填充物位。然后,分析所接收的反射测量信号140,并确定填充材料回波,可以根据填充材料回波的位置(其对应于测量信号的传播时间)计算出填充物位。
[0050]
第一雷达传感器装置101也可以被构造成扫描填充材料表面,以便确定填充材料表面的拓扑。在此情况下,第一雷达传感器装置可以具有包括用于波束控制的天线阵列的雷达芯片。
[0051]
第二雷达传感器装置102被设计成用于监测容器103外部的环境160,并例如布置在现场设备上或布置在现场设备的顶部上或顶部正下方,也就是说,布置在雷达传感器100的背离过程侧的一侧。
[0052]
因此,雷达传感器100被构造用于监测其环境,尤其可被构造为用于物位测量技术、过程测量技术、生产技术或自动化工业。
[0053]
对于某些应用,现场设备的环境监测可以是有利的。由于第二雷达传感器装置102用于该目的,因此不需要额外的红外传感器、超声波传感器、电容传感器或相机来进行环境监测。
[0054]
除了现场设备100的第一传感器装置101之外,还设置有雷达传感器装置102,雷达传感器装置102例如安装在壳体105的相对侧上并用于环境监测。如同第一雷达传感器装置
101(也可以称为过程测量雷达模块),第二传感器装置102可装配有其它天线装置。例如,过程测量雷达模块可设置有喇叭天线以便测量过程变量,而第二雷达传感器装置102可装配有用于环境识别的贴片天线202(参见图2a)。第二雷达传感器装置102还可以被构造为穿过雷达传感器的壳体壁进行测量,从而不必从外部看到天线。
[0055]
为了进行环境识别,第二雷达传感器装置102的主波束方向204可以定向成与第一雷达传感器装置101的主波束方向203不同的方向。在此,除了图2b所示的反平行定向(α=180
°
)之外,如图2d所示,钝角定向(β≥90
°
)也是有意义的。
[0056]
第一雷达传感器装置101和第二雷达传感器装置102都可被设计为所谓的mimo(multiple input multiple output)雷达模块或具有模拟或数字波束成形的雷达模块。这种情况例如在图3示出,图3示出了控制单元120可以控制第一雷达传感器装置101的电路121和第二雷达传感器装置102的相应的控制电路,使得能够在不同的方向上发射两个测量信号,从而扫描填充材料表面或环境。
[0057]
雷达传感器可以被构造为使得当有人靠近或站在雷达传感器前方时或在测量装置前方不存在物体时,仅开启位于雷达传感器100上的背光和/或相关的显示器。
[0058]
对于这种存在识别,可使用第二雷达传感器装置102。
[0059]
如图4所示,雷达传感器还可被构造为安装在可堆叠的移动容器103上。额外的第二雷达传感器装置102可被构造为检测在相应的测量装置上方是否存在另一物体(例如容器)。该信息可用于计算测量变量。堆叠的容器103可以通过实际上不存在的多次反射402生成“幻像目标”。
[0060]
第一和/或第二雷达传感器装置101、102的测量速率还可以根据在雷达传感器的环境中是否检测到物体而进行调整。例如,雷达传感器100可装配在盖501的下方(即,安装在容器开口110的下方),并能够根据容器是打开或是关闭提高或降低测量速率(反之亦然)。也可以完全地设置测量。图5示出了相应的测量构造。
[0061]
本发明提供了一种新的操作概念,其中用户通过手势与雷达传感器或现场设备的操作模块进行交互。这些手势通过集成在雷达传感器的操作模块或壳体中的第二雷达传感器装置102来检测。
[0062]
图7a示出了操作模块形式的可更换雷达传感器装置的立体图和侧视图。图7b示出了图7a的可更换雷达传感器装置,其中还示出了用于手势识别的传感器装置。
[0063]
mimo雷达芯片可通过合适的信号处理单元进行优化,以识别由手部执行的手势。为此,例如这些雷达芯片安装到操作模块中,使得手势识别雷达芯片的主发射方向定向为基本上垂直于显示器(参见图7b)。然后,如图6所示,操作模块102安装在现场设备中(例如,安装在雷达传感器100中),并例如位于现场设备壳体的与过程接口(prozessanschluss)相对的一侧。
[0064]
该雷达方法的优点在于,除了距离之外,还可以评估速度,其它环境监测传感器不必是这种情况。只有借助于速度部件,才能够通过雷达提高手势检测的信息密度。
[0065]
可以实施以下的调制形式。例如,对于环境监测雷达模块(第二雷达传感器装置102),可以使用线性调频序列(chirp sequence)方法、调频连续波(fmcw)方法或脉冲多普勒方法。例如,对于测量雷达模块(第一雷达传感器装置101),可以使用fmcw方法或脉冲雷达方法。或者,可以使用上述雷达方法。
[0066]
此外,两个雷达传感器装置可以被设计为mimo系统。这意味着可以存在多个发射天线和/或接收天线。因此,可以控制雷达传感器装置的主发射方向和主接收方向,这显著地有助于手势识别(参见图3)。
[0067]
因此,手势识别雷达传感器(更准确地,第二雷达传感器装置102)不必一直扫描环境,例如可以通过用户敲击现场设备壳体壁来激活手势识别雷达传感器。在敲击以后,可以通过手势来控制和参数化操作模块或现场设备。该过程的优点在于,不必拧下现场设备,这对于在潜在爆炸危险的区域中使用的现场设备是有利的。
[0068]
对于这种类型的参数化,操作模块需要信号通知装置,以便向用户提供关于由手势控制输入的命令是否得到正确理解的反馈。例如,可以以光学(显示器、led)、声学(信号强调)或振动(壳体振动)的方式来实施该反馈。
[0069]
下面列出了本发明的各个方面:
[0070]
除了通常的过程雷达(第一雷达传感器装置)101之外,额外的雷达模块(第二雷达传感器装置)102布置成使得额外雷达模块的主发射方向相对于过程测量模块的主发射方向成大于90
°
的角度。
[0071]
两个雷达传感器装置101、102可具有不同的频率范围、雷达调制形式、信号处理算法、天线结构、天线开度角、发射天线和接收天线的数量、测量范围、测量时间间隔等。
[0072]
可使用两个雷达传感器装置101、102来确定测量变量。
[0073]
第二雷达传感器装置102可用于环境监测。
[0074]
第二雷达传感器装置102可用于手势控制。
[0075]
由于不必打开雷达传感器或不必拧下盖子即可操作传感器,所以雷达传感器100可以使雷达传感器对于潜在爆炸危险区域存在优势。
[0076]
用于手势控制的第二雷达传感器装置102可具有允许模拟或数字波束成形的多个发射天线和/或接收天线。
[0077]
两个雷达传感器装置101、102都可被构造成除了距离之外还能够检测速度。
[0078]
雷达传感器装置101、102的能量例如可以从io-link、4...20ma接口或电池/蓄电池获得。
[0079]
在手势控制的情况下,用户需要关于传感器是否已经理解输入信息的反馈。这例如可以是显示器、led或振动或声音信号的形式。
[0080]
因此,手势控制不必持续地扫描环境,例如可以通过“敲击”来激活手势控制。
[0081]
第一雷达传感器装置101和第二雷达传感器装置102可集成在半导体模块中。波导、同轴导体或电介质波导可用于将信号路由到相应的天线。
[0082]
操作模块中的雷达芯片可被设计作为mimo芯片、simo芯片或mosi芯片(一个或多个发射天线或接收天线),并因此可以执行波束成形。
[0083]
操作模块中的雷达芯片可以使用fmcw雷达方法、线性调频序列方法或脉冲多普勒方法来构造。
[0084]
第二雷达传感器装置102的主光束方向垂直于操作模块的显示器。
[0085]
另外,应指出,“包括”和“具有”不排除其它元件或步骤,并且不定冠词“一”或“一个”不排除多个。还应指出,已经参考上述示例性实施例中的一者说明的特征或步骤也可以与上述其它示例性实施例的其它特征或步骤结合使用。权利要求中的附图标记不应视为是
限制的。
[0086]
相关申请的交叉引用
[0087]
本申请要求2019年7月25日提交的欧洲专利申请19 188 373.5的优先权,其全部内容通过引用方式并入本文。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1