带有对象检测的实验室自动化设备控制程序生成的制作方法
[0001]
本发明涉及一种用于生成实验室自动化设备的控制程序的方法、计算机程序和计算机可读介质,以及一种控制系统。
背景技术:
[0002]
实验室自动化设备用于自动化实验室助理的任务,例如,对患者进行特定疾病的测试。通常,通过生化过程来采集并分析患者的血液、尿液、粪便等样本。这样的过程包括各种操作,如添加物质、孵育、分离等,以及定量或定性地测量指示特定疾病的物质的量或存在的测量过程。
[0003]
通常,实验室自动化设备的编程是一项复杂的任务,需要特殊技能。用于控制实验室自动化设备的程序可能必须输入到控制pc中。尽管可能存在用于生成此类程序的图形工具,但是可能必须使用特定的脚本语言来实现更复杂的过程,这需要在编程和实验室自动化设备的功能方面具有特殊的知识。因此,实验室助理倾向于自己用少量样本来执行过程。
[0004]
为了简化带有机械臂的实验室自动化设备的编程,已知在示教模式下手动移动机械臂,在该模式下,机械臂可以自由移动到任何位置,并且可以通过简单地按下按钮来设置示教点。然后保存机械臂在示教点处的位置,并将这些位置用于生成控制程序。
[0005]
ep 2 269 077 b1涉及一种图形编程方法,其中实验室自动化设备的部分布局以图形界面显示。图形界面中的移液器可以移动,以定义实验室自动化设备的控制程序。
[0006]
us 2006/0 085 162 a1描述了一种将由操作员携带的手持式样本转移工具开发的测定规程转移到机器人样本处理器的方法。基于电磁三角测量的位置检索被用于检测活动工具的实际位置。
技术实现要素:
[0007]
本发明的目的是简化实验室自动化设备的编程和/或控制。
[0008]
该目的通过独立权利要求的主题来实现。根据从属权利要求和以下描述,其他示例性实施例是显而易见的。
[0009]
本发明的第一方面涉及一种用于生成实验室自动化设备的控制程序的方法。该方法可以利用包括实验室自动化设备、其控制器和相机的系统来执行。
[0010]
通常,实验室自动化设备可以是适于自动地执行实验室助理的任务的任何设备。至少这样的实验室自动化设备包括移液臂,该移液臂适于在不同位置之间移动机器人移液器并且适于在这些位置处抽吸和喷射液体。可以从容器提供的腔中抽吸液体以及将液体喷射进容器提供的腔中,这些容器可以位于实验室自动化设备的工作台上。这样的容器可以包括孔、样本管、微量滴定板和/或试剂容器等中的至少一个。
[0011]
利用该方法,通过相机记录实验室助理的移动和/或操作,并且例如通过对象识别和对象跟踪来评估由相机生成的视频数据,以确定用于实验室自动化设备的控制程序的步骤。
[0012]
根据本发明的实施例,该方法包括:接收显示实验室助理的工作区域的视频数据,该工作区域包含手持式移液器和用于提取和/或接收液体的容器。实验室助理可以使用手持式移液器和容器执行测定规程,该容器可以包含样本、液体和/或试剂。例如,容器可以包括孔、微量滴定板、试剂容器、样本管等中的至少一个。工作区域可能已经由实验室助理用一组容器组装而成,例如,容器可能已放置在桌子上。但是,工作区域也可以是实验室自动化设备的一部分,诸如实验室自动化设备的工作台和位于其上的容器。在这种情况下,移液臂可以被移动到不会干扰手持式移液器的移动的位置。
[0013]
实验室助理的工作区域和移动可以通过相机记录,该相机的视野被定向到容器和/或手持式移液器。相机可以以可见光、紫外光和/或红外光操作。
[0014]
视频数据,也可以看作是视频流和/或随时间推移的一系列图像,可以包括灰度或彩色像素数据,它们也可以可选地包括深度信息。例如,每个像素可以被提供有深度值,该深度值可以由tof-(飞行时间)相机生成。但是,深度信息也能够以立体数据的形式提供,即,以由两个相机获取的两组视频数据的形式提供。
[0015]
根据本发明的实施例,该方法进一步包括:在视频数据中检测容器的开口并且确定开口的位置;以及在视频数据中检测手持式移液器的移液器尖端并且确定尖端的移动。例如,可以基于其形状来检测开口,例如,在视频数据中相对于开口的环境而言,开口可以是较暗的圆圈,并且可以使用对象识别算法来检测这样的圆圈。也可以以这种方式,即基于其形状,来检测移液器尖端。移液器尖端也可以用特殊的颜色和/或图案来标记,这可以用于在视频数据中检测移液器尖端的位置。
[0016]
容器可以被存放在作为工作区域的工作台上。容器也可以由实验室助理握在他的一只手中。
[0017]
从视频数据中的开口和移液器尖端的位置,可以导出开口和/或移液器尖端的三维位置。当视频数据包含深度信息时,这可以被促进。取决于形状和/或光学标记,可以识别容器的类型和/或内容物。
[0018]
移液器尖端的移动可以用沿着尖端跟随的轨迹的点被编码。通常,移液器尖端的移动可以用包含关于移液器尖端随时间推移的位置的信息的移动数据被编码。
[0019]
根据本发明的实施例,该方法进一步包括:根据移液器尖端相对于开口的移动,生成用于实验室自动化设备的控制程序,其中该控制程序适于根据在工作区域中的手持式移液器的移动,相对于实验室自动化设备的容器移动实验室自动化设备的带有机器人移液器的移液臂。
[0020]
总之,实验室助理可以执行不同的移液动作以及实验室器具的移动。手动执行的所有相关方面可用于生成控制程序,该控制程序可包括有关移液速度、位置和由实验室助理执行的动作之间的定时的信息。
[0021]
可能会在由实验室助理移动手持式移液器的时间期间,生成和/或执行控制程序。换句话说,控制程序可以与手持式移液器的移动(几乎)同时被生成和/或执行。也可能当实验室助理完成手持式移液器的移动时,生成和/或执行控制程序。也可能当实验室助理完成手持式移液器的移动时,生成并存储控制程序,并且在稍后的时间执行该控制程序。
[0022]
例如,可以根据视频数据确定手持式移液器的轨迹上的特定跟踪或示教点。当手持式移液器的移液器尖端进入如视频数据中检测到的开口时,可以定义和/或记录这些点。
从这些点中,可以得出移液臂的移动,该移动还访问与工作区域的容器相对应的实验室自动化设备的容器的所有这些开口。必须注意的是,机器人移液器的轨迹可能与手持式移液器的轨迹不同。这可能是由于以下事实:实验室自动化设备中的容器以不同的方式布置和/或轨迹适合于移液臂的更有效移动。
[0023]
除了单通道手持式移液器外,也可以使用多通道手持式移液器。在这种情况下,可以跟踪多个移液器尖端。
[0024]
移液臂的移动可以被编码到控制程序中,当该控制程序在被执行时执行移动。控制程序可以是任何数据或数据文件,当它们由实验室自动化设备的控制器处理时,会导致移液臂的相应移动。
[0025]
控制程序也可以是可由实验室助理修改的脚本程序。例如,如下所述,在测定规程期间使用的容器和/或液体的类型可以用在脚本程序中指示的颜色编码。脚本程序中的相应颜色然后可以由实验室助理用脚本程序中的试剂类型和/或容器类型替换。
[0026]
根据本发明的实施例,利用对象识别算法来检测开口和移液器尖端。也可以利用对象识别算法来检测实验室自动化设备的其他组件,诸如容器。诸如开口、移液器尖端和/或容器的对象的形状可以被存储在处理视频数据的计算设备中,并且可以将该形状与从视频数据提取的形状进行比较。当形状一致时,可以检测相应对象并且可以确定视频数据中的该对象的位置。根据视频数据中的位置,可以确定相应对象相对于工作区域的位置。
[0027]
根据本发明的实施例,利用对象跟踪算法来跟踪移液器尖端的移动。以这种方式,可以确定移液器尖端相对于容器和/或其开口的轨迹。
[0028]
当相机静止时,可以假设容器及其开口也保持静止。但是,当相机移动时,例如在将相机附接在实验室助理的头部的情况下,也可以在视频数据中跟踪容器和/或开口的位置。据此,可以确定移液器尖端相对于容器的相对位置。也可能是实验室助理移动了一个或多个容器。在这种情况下,还可以跟踪一个或多个容器和/或其开口。
[0029]
根据本发明的实施例,该方法进一步包括:从视频数据中识别每个容器或至少一些容器的容器类型。通过识别容器,可以确定容器中液体的类型。然后可以生成控制程序用于与被识别用于工作区域中的容器类型相同的实验室自动化设备的容器。例如,可以确定由实验室助理抽吸和/或分配哪种类型的液体,并且生成控制程序以抽吸和分配相同类型的液体。
[0030]
容器的类型可以指容器的内容物和/或容器的特性,诸如容积、形状等。
[0031]
液体的类型可以指化学和/或物理特性,如液体的粘度、表面张力或特定密度和/或含量,诸如液体是缓冲溶液、样本、试剂等。
[0032]
根据本发明的实施例,该方法进一步包括:从附着到容器的rfid标签中识别每个容器或至少一些容器的容器类型。可能某些或所有容器都设置有rfid标签,也称为rfid响应器,可以使用rfid阅读器从中读取码。rfid阅读器可以由实验室助理握持,可以被集成到实验室自动化设备和/或工作区域中。
[0033]
根据本发明的实施例,在工作区域中的容器被设置有计算机可读码,并且根据视频数据中的计算机可读码来确定容器的类型。这样的计算机可读码可以是条形码或二维码。
[0034]
根据本发明的实施例,在工作区域中的容器被设置有(可能是有色的和/或图案化
的)标签,并且由容器的标签编码和/或呈现的信息是从视频数据中确定的。在这种情况下,可以根据信息来确定容器的类型,诸如颜色和/或特定图案。
[0035]
开口可能是有色的。例如,开口的边界可以是黑色、粉红色、红色等。
[0036]
可以在工作区域中使用带特殊标签的容器,这些容器不需要容纳真实的试剂、样本等,而仅用于生成控制程序。在这种情况下,可以以使得实验室助理也可以解释其信息(诸如颜色或图案)的方式来制作标签。
[0037]
在工作区域中使用的容器可以不需要容纳任何液体,而仅用于生成控制程序。在这种情况下,实验室助理将在手持式移液器中抽吸空气并分配空气。
[0038]
控制程序可以是可由实验室助理编辑的脚本程序,其在第一步中包含标签信息作为占位符,然后可以将其替换为预期试剂的预期指令。
[0039]
根据本发明的实施例,容器的类型是根据容器的形状确定的,容器的形状是根据视频数据确定的。在这种情况下,容器的类型可以是槽、试管、微量滴定板(例如,具有腔的数量和/或排列)。
[0040]
根据本发明的实施例,该方法进一步包括:从手持式移液器接收操作数据,该操作数据包括下述中的至少一项:激活液体的抽吸和/或分配、分配的和/或抽吸的液体量、抽吸和/或分配的速度。特定的手持式移液器可以测量其是否已被激活以进行抽吸和/或分配。此外,可以调节特定的手持式移液器以利用如上所述的特定过程参数执行抽吸和/或分配。这些移液器还可以例如经由无线通信连接(诸如)将所测量的数据和/或调整后的参数发送到其他设备。操作数据可以用于详细说明控制程序和/或可以被纳入控制程序中。
[0041]
根据本发明的实施例,控制程序适于根据操作数据来控制机器人移液器抽吸和分配液体。根据从手持式移液器接收的操作数据,可以生成控制参数和/或控制命令,该控制参数和/或控制命令根据操作数据来控制实验室自动化设备。
[0042]
但是,也能够直接从视频数据中确定操作数据,诸如容器处的抽吸和/或分配。例如,当手持式移液器或其尖端移进开口并且然后可以假设有液体被抽吸(例如,当移液器为空时)或被分配(例如,当移液器已经被吸出时)时,可以从视频数据中确定操作数据。
[0043]
根据本发明的实施例,可以根据移液器尖端相对于开口的移动来确定液体的抽吸点和分配点。还可以根据从手持式移液器接收的操作数据来确定抽吸点和分配点。然后可以从抽吸点和分配点中确定移液臂的移动。
[0044]
可以将分配或喷射液体的点视为用于对实验室自动化设备进行编程的最重要的跟踪点和/或示教点。控制程序可以仅从这些点生成。可以独立于在这些点之间的手持式移液器的移动和/或其轨迹来确定在两个连续点(例如,抽吸点和连续的分配点)之间的移液臂的移动。因此,移液臂的移动可以遵循与手持式移液器不同的轨迹。考虑到可能的移动和/或避免实验室自动化设备内的碰撞,可以相对于轨迹长度和/或相对于移液臂的限制进一步优化移液臂的移动。
[0045]
根据本发明的实施例,针对一个样本记录移液器尖端的移动和/或移液器的操作数据。然后可以生成控制程序,以便针对实验室自动化设备中的多个样本重复移液臂的移动和/或机器人移液器的抽吸和分配。也可以将用一通道移液器执行的测定过程转换为用于多通道移液器的控制程序。
[0046]
实验室助理可以在工作区域中仅针对一个样本执行测定过程。然后可以生成控制
程序,以便针对实验室自动化设备中的多个真实样本重复或优化移液臂的移动、机器人移液器的抽吸和分配。控制程序可以对实验室自动化设备中的每个样本(可能已经用传感器确定了这些样本的存在)重复这些步骤。
[0047]
实验室助理也可以在生成控制程序后对其进行更改。例如,实验室助理可以将控制结构包括在控制程序中,其重复已经被生成用于仅一个样本的步骤。
[0048]
必须注意,可以相对于由手持式移液器输入的容器类型定义跟踪点或示教点,从该跟踪点或示教点生成部分控制程序。这样的点不仅可以编码坐标位置。例如,跟踪点或示教点可以编码“样本管中的移液器”、“空孔中的移液器”等。以这种方式,不仅可以用实验室自动化设备来重复手持式移液器的移动,而且实验室助理在工作区域中针对一个样本执行的任务步骤也可以应用于实验室自动化设备中的若干样本。在这种情况下,可以不重复手持式移液器的确切移动,而是重复用手持式移液器定义的移动方案。
[0049]
例如,可以针对微量滴定板的所有样本重复手持式移液器的移动。在这种情况下,可以通过向原始移动添加偏移来确定移动,该偏移可以取决于微量滴定板中孔之间的距离。
[0050]
也可以将手持式单通道移液器的移动映射到多通道机器人移液器的移动。
[0051]
根据本发明的实施例,视频数据包括深度信息并且用适于生成深度信息的相机被生成。如已经提到的,深度信息可以有助于确定容器和/或其开口相对于移液器尖端的相对位置。此外,可以改善对象识别和对象跟踪。
[0052]
例如,相机可以是立体相机或tof(飞行时间)相机。
[0053]
根据本发明的实施例,视频数据是用附接到实验室助理的头部的相机生成的。使用这种相机,实验室助理工作的区域可以始终在相机的视角方向上。
[0054]
本发明的另一方面涉及一种用于生成用于实验室自动化设备的控制程序的计算机程序,在由处理器执行时,该计算机程序适于执行以上和以下描述的方法的步骤。该计算机程序可以在诸如pc的计算设备中执行,该计算设备与实验室自动化设备和相机通信地互连。
[0055]
本发明的另一方面涉及一种计算机可读介质,在该计算机可读介质中存储这样的计算机程序。计算机可读介质可以是软盘、硬盘、usb(通用串行总线)存储设备、ram(随机存取存储器)、rom(只读存储器)、eprom(可擦可编程只读存储器)或闪存。计算机可读介质还可以是数据通信网络,例如互联网,其允许下载程序代码。通常,计算机可读介质可以是非暂时性或暂时性介质。
[0056]
本发明的另一方面涉及一种用于实验室自动化设备的控制系统,该控制系统包括实验室自动化设备和相机。该计算设备可以例如经由usb、以太网和/或无线连接与实验室自动化设备和相机通信地互连。此外,计算设备适于执行以上和以下描述的方法。
[0057]
该计算设备还可以适于控制实验室自动化设备和/或还可以执行控制程序,该控制程序借助于视频数据中的对象检测和/或对象跟踪而生成。
[0058]
必须理解,上文和下文中描述的方法的特征可以是上文和下文中描述的控制系统、计算机程序和计算机可读介质的特征,反之亦然。
[0059]
此外,该方法可以是用于控制实验室自动化设备的方法,然后该实验室自动化设备也可以执行所生成的控制程序。
[0060]
从下文描述的实施例中,本发明的这些和其他方面将变得显而易见,并参考下文描述的实施例来阐明本发明的这些和其他方面。
附图说明
[0061]
下面,参照附图更详细地描述本发明的实施例。
[0062]
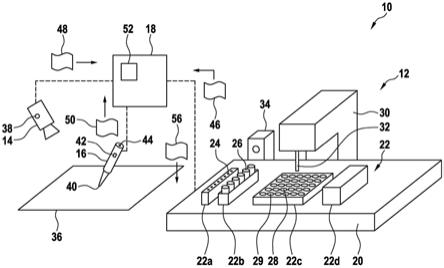
图1示意性地示出了根据本发明的实施例的控制系统。
[0063]
图2示意性地示出了用于图1的控制系统的实验室助理的工作区域。
[0064]
图3示出了根据本发明实施例的用于生成控制程序和用于控制实验室自动化设备的方法的流程图。
[0065]
在附图标记列表中以汇总形式列出了附图中使用的附图标记及其含义。原则上,图中相同的部分具有相同的附图标记。
具体实施方式
[0066]
图1示出了控制系统10,其包括实验室自动化设备12、相机14和手持式移液器16。控制系统10进一步包括与实验室自动化设备12、相机14和手持式移液器16通信地互连的计算设备18,例如pc。可以经由和/或以执行通信。
[0067]
实验室自动化设备12包括工作台20,若干可移动容器22可以被安装在工作台20上。例如,容器22包括具有一次性移液器尖端24的容器22a、具有样本管26的容器22b、具有孔28的微量滴定板22c和试剂容器22d。
[0068]
实验室自动化设备12进一步包括具有移液器32的移液臂30和适于确定容器22的位置和/或定向的传感器34。传感器34还可以是和/或包括适于读取容器22上的条形码或更一般的计算机可读码的阅读器。传感器34还可以是和/或可以包括相机、激光扫描仪和/或适于确定容器22的位置和/或定向的任何设备。传感器34还可以包括rfid阅读器。
[0069]
相机14可以是用于生成立体视频数据的立体相机,或者可以是用于生成逐像素深度信息的tof相机。相机14的视场指向实验室助理的工作区域36,该工作区域将相对于图2更详细地描述。
[0070]
相机14可以是固定相机,或者可以被安装到实验室助理的头部。在这种情况下,相机14可以包括运动传感器38,例如加速度传感器,其适于确定相机14和/或实验室助理的头部的位置和/或定向。以这种方式,可以确定相机14的视角位置和/或视角方向。
[0071]
手持式移液器16可由实验室助理操作和移动。手持式移液器16包括移液器尖端40,其可用于从容器中抽吸液体并将液体分配到容器中。此外,手持式移液器可以包括单元42,该单元42适于确定实验室助理是否已致动手持式移液器16以抽吸或分配液体。手持式移液器16还可以适于被设置若干过程参数,诸如液体的分配和/或抽吸量、抽吸和/或分配的速度。这些参数也可以由单元42获取。
[0072]
手持式移液器16可以包括按钮44,该按钮可以被实验室助理按下。利用按钮44,可以触发抽吸和分配。
[0073]
图1进一步示出了在系统10的操作期间可以在组件12、14、16、18之间交换的数据。
[0074]
来自实验室自动化设备12的配置数据46可以被发送到计算设备18。配置数据46可
以编码实验室自动化设备12的至少一些容器22的位置、定向和/或类型。配置数据还可以编码容器22中有哪种类型的液体,诸如样本、试剂、稀释液等。例如,可以用传感器34来获取该数据。为此,可以在至少一些容器22上印刷计算机可读码。。
[0075]
计算设备18还从相机14接收视频数据48。视频数据可以显示手持式移液器16以及实验室助理的工作区域36中的其他容器的移动。
[0076]
此外,计算设备18可以从手持式移液器16,特别是从移液器16的单元42中接收操作数据50,移液器16的单元42可以包括无线发送器/接收器。例如,如上所述,操作数据50可以包括由单元42获取的信息,诸如抽吸和/或分配的激活以及利用移液器16可调节的过程参数。
[0077]
如下面还将更详细描述的,至少当实验室助理完成了他或她在工作区域中已经执行的测定规程时,计算设备18可以生成用于实验室自动化设备12的控制程序52,该控制程序52用实验室自动化设备12执行模拟测定规程。
[0078]
最后,计算设备18可以执行控制程序52,该控制程序52然后生成控制命令54,该控制命令54被发送到实验室自动化设备12和/或该控制命令54控制移液臂30以执行由实验室助理利用手持式移液器16定义的测定规程。
[0079]
图2更详细地示出了工作区域36。在工作区域36中,可以布置容器22',其可以类似于和/或等同于实验室自动化设备12中的容器22。工作区域36可以是实验室自动化设备12的工作台20的一部分,并且容器22'和容器22可以是相同的。然而,工作区域36也可能与实验室自动化设备12位于不同的位置。
[0080]
作为容器22,工作区域36的容器22'可包括具有一次性移液器尖端24'的容器22a'、具有样本管26'的容器22b'、具有孔28'的微量滴定板22c'和试剂容器22d'。
[0081]
适于接收液体的容器22和一次性移液器尖端24'都具有开口56,该开口可以在视频数据48中被检测到。
[0082]
可以在一些或所有容器22'上设置计算机可读码60。可以从视频数据48中读取码60,并且可以确定被编码到码60中的信息。该信息可以包括容器的类型(诸如试剂容器或样本容器)、容器中的液体的类型等。可替代地或附加地,可以在一些或所有容器22'上设置rfid标签。还可使用rfid阅读器从容器22'中读取码60。
[0083]
一些或全部容器22'也可以被设置有标签62。标签可以是实验室助理也可以识别的特定图案和/或颜色。例如,容器22'的边界或内部可以以用于提供标签62的颜色上色,诸如孔28'所示。标签62可以在视频数据48中被检测到并且可以与容器22'相关联。可以从视频数据48中确定标签62的信息,诸如图案码、颜色码、液体的类型等。
[0084]
图2还示出了工作区域36中的手持式移液器16的轨迹58以及轨迹58上的跟踪点64a、64b、64c、64d,例如,当实验室助理按下按钮44时,可以记录这些跟踪点,因此这些跟踪点可以从操作数据50中确定。也可以是当从视频数据48中确定移液器尖端40已进入容器22'的开口56时,记录跟踪点64a、64b、64c、64d。
[0085]
图3示出了用于生成用于实验室自动化设备12的控制程序52并且可选地用于通过执行控制程序52来控制实验室自动化设备12的方法的流程图。
[0086]
开始时,实验室助理可以将容器22'布置在工作区域36中,当相机14是头戴式相机14时,实验室助理可以戴上相机14,并且可以命令计算设备18开始记录。
[0087]
在步骤s10中,在计算设备18中接收显示实验室助理的工作区域36的视频数据48。可选地,在计算设备18中接收来自手持式移液器16的操作数据50。
[0088]
在步骤s12中,由计算设备18来评估视频数据48和可选地操作数据50。
[0089]
计算设备18可以在视频数据48中检测容器22'、容器22'的开口56,并且可以确定容器22'和开口56的位置。而且,计算机可读码60和标签62可以被检测到。
[0090]
可以使用对象识别算法来检测容器22'、开口56、移液器尖端40、码60和/或标签62。组件22'、56、40、60、62的形状和/或图案可以存储在计算设备18中,并且与从视频数据48中确定的形状进行比较。此外,可以以这种方式确定容器22'的特定类型,诸如微量滴定板22c'或移液器尖端容器22a'。
[0091]
在视频数据48中检测到的码60和/或标签62可以被评估以检索它们的信息内容。计算机可读码60可以被转换成它们的数据内容。标签62的图案和/或颜色可以被转换成图案码和颜色码。
[0092]
此外,计算设备18可以确定移液器尖端40相对于容器22'的移动和/或轨迹58,容器22'或者放在桌子、工作台等上,或者由实验室助理握持。如果相机14是头戴式相机14,则还可以跟踪容器22'和/或开口56,从而可以确定移液器尖端40相对于容器22'和/或开口56的相对位置。可以使用对象跟踪算法来跟踪组件22'、56、40。
[0093]
另外,计算设备18可以确定轨迹58上的跟踪点64a、64b、64c、64d。无论何时发生特定事件,诸如安装或处置一次性尖端24'(跟踪点64a,参见图2)、液体62、64的抽吸(跟踪点64b,64d)、液体62、64的分配(跟踪点64c),都可以记录这样的跟踪点。跟踪点64a可以是安装点,跟踪点64b、64d可以是抽吸点,并且跟踪点64c可以是分配点。
[0094]
通常,当手持式移液器16的内容物和/或配置改变时,可能发生事件。可以从视频数据48中确定此类事件。例如,当安装了一次性尖端24'时,移液器尖端40的形状会发生变化。当移液器尖端40已经下降到开口56中时,也可以确定已经抽吸了液体。作为另一示例,每当实验室助理按下按钮44(可以从操作数据50中读出)时,可以假定已经抽吸或分配了液体。通常,可以基于操作数据50对跟踪点64a、64b、64c、64d进行编码。
[0095]
跟踪点64a、64b、64c、64d可以对事件的位置和/或事件的类型进行编码。该位置可以被编码为三维坐标和/或被编码为发生事件的容器22'或容器22'的类型。
[0096]
当实验室助理完成测定过程时,他可以命令计算设备18(或正在计算设备18中运行的相应计算机程序)生成控制程序52。
[0097]
在步骤s14中,然后根据移液器尖端40相对于开口56的位置的移动以及在步骤s12期间确定的其他信息,生成用于实验室自动化设备12的控制程序52。
[0098]
通常,生成控制程序52,使得其适于根据由实验室助理在工作区域36中定义的测定规程,相对于容器22移动带有实验室自动化设备12的移液器32的移液臂30。这可以包括根据手持式移液器16移动移液臂30的机器人移液器32,根据手持式移液器16控制机器人移液器32抽吸和分配液体和/或用于根据手持式移液器16安装和处置一次性尖端24。
[0099]
在一个示例中,工作区域36中的容器22'被布置为实验室自动化设备中的容器22(或这些容器22、22'相同)。然后,可以生成控制程序52,以使得通过带有机器人移液器32的移液臂30重复手持式移液器16的仅抽吸和分配、可选地一次性尖端24的安装和处置以及向相应位置的移动。控制程序52不必知道各个容器22、22'内的内容物和/或液体。
[0100]
在另一示例中,实验室助理对一个样本26'执行测定规程,即,为一个样本26'记录视频数据48,并且生成控制程序52,以使其重复移液器32臂的移动和/或实验室自动化设备12中针对多个样本26的机器人移液器32的抽吸或分配。例如,这可以通过简单地将其中发生移液器32的抽吸和分配以及可选地一次性尖端的安装和处置的位置移至对应的容器22处的下一个相邻位置来实现。此外,可沿微量滴定板的列操作多通道机器人移液器32。
[0101]
在另一示例中,从跟踪点64a、64b、64c、64d中确定移液臂30和移液器32的移动、移液器32的抽吸和分配和/或可选地一次性尖端24的安装和处置。从与跟踪点相关联的事件中,可以导出用于控制程序52的相应命令。例如,跟踪点64a可以被转换为命令“安装可拆卸尖端”,并且跟踪点64a可以被转换为“抽吸样本”等。同样在这种情况下,可以生成控制程序52,使得它对若干样本重复该任务。
[0102]
在另一示例中,可以生成控制程序52用于与被识别用于工作区域36中的容器22'类型相同的实验室自动化设备12的容器22。在这种情况下,跟踪点64a、64b、64c、64d可用于识别必须从哪种类型的容器22抽吸液体以及必须向哪种类型的容器分配液体。在这种情况下,容器22'可以以与容器22不同的方式被布置。
[0103]
为了确定可以与容器22匹配的容器22的类型,计算设备18从实验室自动化设备12中请求配置数据46。例如,激光扫描仪和/或相机可以确定容器22的类型、位置和/或定向。此外,条形码扫描仪可扫描容器22上的条形码和/或rfid扫描仪可用于确定其类型和/或内容物。配置数据46可以包括关于容器22的位置和类型的信息。配置数据46可以用于生成控制程序52。
[0104]
在步骤s16中,控制程序52可以可选地被修改为控制程序52'。例如,生成的控制程序52可以是脚本,该脚本可以由实验室助理进一步修改。例如,实验室助理可以将重复的控制结构插入到控制程序52中。控制程序52中还可以包括其他步骤,如样本的孵育。
[0105]
控制程序52也可以包含基于图案码和/或颜色码(诸如“红色孔”、“粉红色容器”等)的命令,这些码可以由实验室助理替换为真实容器22'或实验室自动化设备12的容器22'的类型。
[0106]
在步骤s18中,例如,当实验室助理命令计算设备18中的计算机程序执行控制程序52、52'时,控制程序52或52'由计算设备18执行。这可能要执行若干次。例如,当控制程序52、52'完成时,实验室助理可以例如以相同的布局在实验室自动化设备12中布置新的容器22,并且可以再次启动控制程序52、52'。
[0107]
当执行控制程序52、52'时,控制命令54被生成,并且实验室自动化设备12执行测定规程,该测定规程已由实验室助理在工作区域36中进行了设计。特别地,可以使用实验室自动化设备12针对多个样本26多次执行工作区域36中针对一个样本26'执行的相同的测定规程。
[0108]
尽管已经在附图和前面的描述中详细地图示和描述了本发明,但是这样的图示和描述应被认为是说明性或示例性的而非限制性的;本发明不限于所公开的实施例。通过研究附图、公开内容和所附权利要求,本领域的和实践所要求保护的发明的技术人员可以理解和实现所公开的实施例的其他变型。在权利要求中,单词“包括”不排除其他元件或步骤,并且不定冠词“一(a)”或“一个(an)”不排除多个。单个处理器或控制器或其他单元可以实现权利要求中记载的若干项的功能。在互不相同的从属权利要求中记载某些措施的事实并
不指示不能有利地使用这些措施的组合。权利要求中的任何附图标记都不应被解释为限制范围。
[0109]
附图标记列表
[0110]
10
ꢀꢀꢀ
控制系统
[0111]
12
ꢀꢀꢀ
实验室自动化设备
[0112]
14
ꢀꢀꢀ
相机
[0113]
16
ꢀꢀꢀ
手持式移液器
[0114]
18
ꢀꢀꢀ
计算设备
[0115]
20
ꢀꢀꢀ
工作台
[0116]
22
ꢀꢀꢀ
容器
[0117]
22a
ꢀꢀ
容器
[0118]
22b
ꢀꢀ
容器
[0119]
22c
ꢀꢀ
微量滴定板
[0120]
22d
ꢀꢀ
试剂容器
[0121]
24
ꢀꢀꢀ
一次性移液器尖端
[0122]
26
ꢀꢀꢀ
样本管
[0123]
28
ꢀꢀꢀ
孔
[0124]
30
ꢀꢀꢀ
移液臂
[0125]
32
ꢀꢀꢀ
移液器
[0126]
34
ꢀꢀꢀ
传感器
[0127]
36
ꢀꢀꢀ
工作区域
[0128]
38
ꢀꢀꢀ
运动传感器
[0129]
40
ꢀꢀꢀ
尖端
[0130]
42
ꢀꢀꢀ
电子单元
[0131]
44
ꢀꢀꢀ
按钮
[0132]
46
ꢀꢀꢀ
配置数据
[0133]
48
ꢀꢀꢀ
视频数据
[0134]
50
ꢀꢀꢀ
操作数据
[0135]
52
ꢀꢀꢀ
控制程序
[0136]
54
ꢀꢀꢀ
控制命令
[0137]
22'
ꢀꢀ
工作区域容器
[0138]
22a' 工作区域容器
[0139]
22b' 工作区域容器
[0140]
22c' 工作区域微量滴定板
[0141]
22d' 工作区域试剂容器
[0142]
24'
ꢀꢀ
工作区域一次性移液器尖端
[0143]
26'
ꢀꢀ
工作区域样本管
[0144]
28'
ꢀꢀ
工作区域孔
[0145]
56
ꢀꢀꢀ
开口
[0146]
58
ꢀꢀꢀ
移动/轨迹
[0147]
60
ꢀꢀꢀ
计算机可读码
[0148]
62
ꢀꢀꢀ
标签
[0149]
64a
ꢀꢀ
跟踪点
[0150]
64b
ꢀꢀ
跟踪点
[0151]
64c
ꢀꢀ
跟踪点
[0152]
64d
ꢀꢀ
跟踪点
[0153]
52'
ꢀꢀ
修改后的控制程序
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1