一种在频域内估算相干测风激光雷达载噪比的方法与流程
[0001]
本发明涉及激光雷达信号处理研究领域,特别是一种在频域内估算相干测风激光雷达载噪比的方法。
背景技术:
[0002]
在大气风场的晴空探测中,测风激光雷达发挥着极其重要的作用。激光雷达使用激光作为载波信号,与大气中的分子和气溶胶粒子相互作用产生回波信号,利用多普勒效应进行风场的测量,具有探测精度高、时空分辨率高、响应速度快等优点,广泛应用于机场、风电场等场合。测风激光雷达分为相干和非相干两种,其中相干测风激光雷达采用外差探测方式,有利于弱信号的探测,在风场数据灵敏度要求较高时应用更为广泛。
[0003]
在测风激光雷达的使用过程中,雷达数据的可靠性是其应用基础。在描述数据可靠性和雷达系统性能方面,cnr是一个非常重要的指标,这直接与激光雷达探测的范围以及精度密切相关。cnr表示信号光功率和噪声功率之间的比值,对于相干测风激光雷达来说,其时域表达式简化为(步志超,2014):其中,η为系统效率,e
x
为激光器发射能量,β为气溶胶后向散射系数,λ为发射激光的波长,r为探测距离,t为传输r处的大气透射率,d为望远镜孔径,h为普朗克常量,b为探测器信号带宽。由公式可以看出,在时域计算cnr需要众多参量,进行实时估算有一定的困难。
[0004]
快速傅里叶变换(fft)是相干测风激光雷达数据处理的最常用方法(kameyama et al. 2009),该方法使用一个距离门内的采样数据,通过功率谱来估算风速。因此,可以使用功率谱数据,从频域进行cnr的估算。一般情况下,原始的功率谱数据不能直接用于cnr的估算,还需要扣除背景噪声,以提高cnr。
[0005]
常用的两种去噪方法是:1、减去最后距离门回波信号(何平等,2013);2、减去当前距离门拟合噪声(步志超,2014)。
[0006]
罗甜等(2017)在此基础上提出了一种频域cnr的计算方法,该方法首先使用前面提到的去噪处理,然后使用功率谱峰值频率为中心固定区间的功率谱数据作为信号,将剩下的数据作为噪声,从而计算出cnr。
[0007]
上述的cnr频域计算方法仍存在如下方面的不足:1、在去噪方面,对于近距离探测应用的相干测风激光雷达(如机舱式激光雷达),其探测范围只有几百米(地基式激光雷达探测范围超过10km),最后一个距离门数据通常含有明显的信号而不能直接作为噪声使用,而目前单距离门拟合的方法完全使用理论值作为噪声,其拟合结果过于理想化,往往会低于实际功率谱的噪声。
[0008]
2、当前的cnr频域估算方法使用固定宽度的功率谱数据作为信号,简洁易行,适用于在信号谱宽变化不大的场合。但随着信号谱宽的变化,功率谱峰值及其3db衰减点的范围随之变化,显然这种使用固定宽度的方法无法反映出这种改变,使信号功率估算产生较大
偏差,从而导致cnr估算的偏差,影响数据有效性的判断。
技术实现要素:
[0009]
本发明要解决的技术问题是针对上述现有技术的不足,而提供一种在频域内估算相干测风激光雷达载噪比的方法,该在频域内估算相干测风激光雷达载噪比的方法使用单个距离门的功率谱数据,通过对频谱分量进行排序和累加,然后和噪声分布理论值对比来获取噪声门限、噪声功率和信号功率,最终计算出cnr。
[0010]
为解决上述技术问题,本发明采用的技术方案是:一种在频域内估算相干测风激光雷达载噪比的方法,包括如下步骤。
[0011]
步骤1、获取原始功率谱数据:使用fft将单个距离门的时域数据转换为频域数据,得到原始功率谱数据。
[0012]
步骤2、计算噪声门限值n
floor
:对步骤1获取的原始功率谱数据,采用排序和噪声分布理论值比较的方法,计算噪声门限值n
floor
。
[0013]
步骤3、去除背景噪声:将步骤2计算的噪声门限值n
floor
作为背景噪声,将步骤1获取的原始功率谱数据减去背景噪声,从而得到更新功率谱数据。
[0014]
步骤4、确定噪声和信号所在频谱位置:对更新功率谱数据,再次采用排序以及和噪声分布理论值比较的方法,确定噪声和信号所在频谱位置。
[0015]
步骤5、计算信号功率和噪声功率:其中,噪声功率的计算方法,包括如下步骤:步骤5a1、读取噪声功率谱数据:将步骤4中确定为噪声所在频谱位置的更新功率谱数据进行读取,得到噪声功率谱数据。
[0016]
步骤5a2、计算噪声功率:对读取的噪声功率谱数据,分别采用取均值和取中值的方法,得到均值噪声功率和中值噪声功率。
[0017]
信号功率的计算方法,包括如下步骤:步骤5b1、读取信号功率谱数据:将步骤4中确定为信号所在频谱位置的更新功率谱数据进行读取,得到信号功率谱数据。
[0018]
步骤5b2、计算信号功率:对读取的信号功率谱数据,分别采用取均值和取中值的方法,得到均值信号功率和中值信号功率。
[0019]
步骤6,当前距离门的cnr,包括如下步骤。
[0020]
步骤61、计算cnr
均值
:将步骤5b2得到的均值信号功率除以步骤5a2得到的均值噪声功率,则得到cnr
均值
。
[0021]
步骤62、计算cnr
中值
:将步骤5b2得到的中值信号功率除以步骤5a2得到的中值噪声功率,则得到cnr
中值
。
[0022]
步骤63、当前距离门的cnr:将计算得到的cnr
中值
和cnr
均值
相比较,取其中较大的数值作为当前距离门的cnr。
[0023]
步骤2中,计算噪声门限值n
floor
的具体方法,包括如下步骤:步骤21、排序:将步骤1获取的原始功率谱数据,按照从小到大的顺序,进行排序。
[0024]
步骤22、选取噪声门限确定数据:将排序后,选取幅值在5%到40%之间的原始功率谱数据,作为噪声门限确定数据。
[0025]
步骤23、计算噪声门限值n
floor
,具体包括如下步骤。
[0026]
步骤23a、计算噪声门限确定数据的均值n
t1
:对步骤22选取的噪声门限确定数据,计算均值n
t1
。
[0027]
步骤23b、计算噪声理论值的均值n
t2
:从理论噪声值中选择与噪声门限确定数据相同位置的数据,并对选择的数据,计算均值,从而得到噪声理论值的均值n
t2
。
[0028]
步骤23c、计算噪声门限值n
floor
:将n
t1
减去n
t2
,从而得出噪声门限值n
floor
。
[0029]
步骤4中,确定噪声和信号所在频谱位置的方法,包括如下步骤:步骤41、排序:对更新功率谱数据,按照从小到大或从大到小的顺序,进行排序。
[0030]
步骤42、确定信号和噪声分界点:将超过理论噪声值1db的更新功率谱数据的位置,作为信号和噪声的分界点,进而确定噪声和信号所在频谱位置。
[0031]
步骤1中,单个距离门的时域数据在fft转换前,先进行加窗处理,减少噪声影响。
[0032]
窗为矩形窗。
[0033]
窗为hamming窗或blackman窗。
[0034]
本发明具有如下有益效果:1、使用单个距离门的功率谱数据,通过对频谱分量进行排序和累加,然后和噪声分布理论值对比来获取噪声门限、噪声功率和信号功率,最终计算出cnr。
[0035]
2、自动化程度高,方便易行,使用当前距离门功率谱数据计算cnr,为相干测风激光雷达数据的有效性确定提供依据。本发明所述方法相比现有的技术,提高了cnr的计算精度,解决了高背景噪声下的cnr估算问题。
附图说明
[0036]
图1为机舱式相干测风激光雷达采集到的单个距离门的原始功率谱数据。
[0037]
图2为本发明方法中参与背景噪声计算的功率谱数据。浅色曲线为经过排序后的功率谱数据,黑色圆圈表示选定参与背景噪声计算的部分,黑色虚线表示动态确定的背景噪声。为便于查看,图中只展示了部分功率谱数据。
[0038]
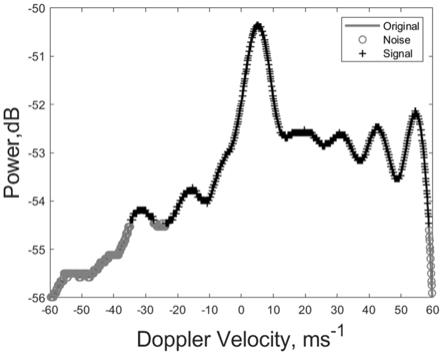
图3为采用本发明方法处理后的功率谱数据。圆滑曲线表示去除背景噪声后的功率谱数据,圆圈标注位置表示判别为噪声,黑色“+”号标注位置表示判别为信号位置。
具体实施方式
[0039]
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
[0040]
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
[0041]
一种在频域内估算相干测风激光雷达载噪比的方法,包括如下步骤。
[0042]
步骤1、获取原始功率谱数据:使用fft将单个距离门的时域数据转换为频域数据,得到原始功率谱数据,如图1所示,显示了以申请人研发的机舱式相干测风激光雷达外场测试后得到的原始功率谱数据。
[0043]
将激光雷达采集到的时域数据,按照距离单元进行fft处理,得到原始功率谱数
据。由于机舱式激光雷达架设较高,故而,在fft转换前,先进行加窗处理,减少噪声影响。窗优选为矩形窗,也可以根据杂波情况选择抑制能力更强的窗函数,如hamming窗、blackman窗等。
[0044]
步骤2、计算噪声门限值n
floor
:对步骤1获取的原始功率谱数据,采用排序和噪声分布理论值比较的方法,计算噪声门限值n
floor
。
[0045]
上述计算噪声门限值n
floor
的具体方法,优选包括如下步骤:步骤21、排序:将步骤1获取的原始功率谱数据,按照幅度从小到大的顺序,进行排序。
[0046]
步骤22、选取噪声门限确定数据。
[0047]
由于占主要部分的噪声服从poisson分布,因此,将排序后,取出原始功率谱数据中5%到40%之间的幅度值,作为噪声门限确定数据。
[0048]
步骤23、计算噪声门限值n
floor
,具体包括如下步骤。
[0049]
步骤23a、计算噪声门限确定数据的均值n
t1
:对步骤22选取的噪声门限确定数据,计算均值n
t1
。
[0050]
步骤23b、计算噪声理论值的均值n
t2
:从理论噪声值中选择与噪声门限确定数据相同位置的数据,并对选择的数据,计算均值,从而得到噪声理论值的均值n
t2
。
[0051]
步骤23c、计算噪声门限值n
floor
:将n
t1
减去n
t2
,从而得出噪声门限值n
floor
。
[0052]
步骤3、去除背景噪声。
[0053]
先将步骤2计算的噪声门限值n
floor
作为背景噪声,如图2所示。这样做的好处是,每一次背景噪声的估算都是基于当前距离门数据动态计算,不受其他距离门影响,同时也比使用理论噪声更符合实际情况。
[0054]
然后,将步骤1获取的原始功率谱数据减去背景噪声,从而得到更新功率谱数据。在噪声较大的情况下,经过该步骤处理更有利于视向风速的计算。
[0055]
步骤4、确定噪声和信号所在频谱位置:对更新功率谱数据,再次采用排序以及和噪声分布理论值比较的方法,确定噪声和信号所在频谱位置。
[0056]
上述确定噪声和信号所在频谱位置的方法,优选包括如下步骤:步骤41、排序:对更新功率谱数据,按照从小到大或从大到小的顺序,进行排序。
[0057]
步骤42、确定信号和噪声分界点:将超过理论噪声值1db的更新功率谱数据的位置,作为信号和噪声的分界点,进而确定噪声和信号所在频谱位置,如图3所示。
[0058]
步骤5、计算信号功率和噪声功率:其中,噪声功率的计算方法,包括如下步骤:步骤5a1、读取噪声功率谱数据:将步骤4中确定为噪声所在频谱位置的更新功率谱数据进行读取,得到噪声功率谱数据。
[0059]
步骤5a2、计算噪声功率:对读取的噪声功率谱数据,分别采用取均值和取中值的方法,得到均值噪声功率和中值噪声功率。
[0060]
信号功率的计算方法,包括如下步骤:步骤5b1、读取信号功率谱数据:将步骤4中确定为信号所在频谱位置的更新功率谱数据进行读取,得到信号功率谱数据。
[0061]
步骤5b2、计算信号功率:对读取的信号功率谱数据,分别采用取均值和取中值的方法,得到均值信号功率和中值信号功率。
[0062]
步骤6,当前距离门的cnr,包括如下步骤:
步骤61、计算cnr
均值
:将步骤5b2得到的均值信号功率除以步骤5a2得到的均值噪声功率(若功率为对数表达,则直接相减),则得到cnr
均值
。
[0063]
步骤62、计算cnr
中值
:将步骤5b2得到的中值信号功率除以步骤5a2得到的中值噪声功率(若功率为对数表达,则直接相减),则得到cnr
中值
。
[0064]
步骤63、当前距离门的cnr:将计算得到的cnr
中值
和cnr
均值
相比较,取其中较大的数值作为当前距离门的cnr。cnr更多地用来表征当前距离门的数据质量,因此选两组数据中的较大值可以使更多距离门数据参与到风场产品的计算当中。
[0065]
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1