一种外差式激光多普勒振动测量装置的制作方法
1.本发明涉及一种振动测量装置,尤其涉及一种外差式激光多普勒振动测量装置,属于光学精密测量技术领域。
背景技术:
2.激光振动测量技术是一种非接触振动测量技术,因其具备精度高、灵敏度高、测量距离远等特点,日益受到各种高精测量领域的青睐,已经广泛应用于机械制造、航空航天、微细加工、建筑等领域。目前,基于激光振动测量的技术主要有:多普勒参考光振动测量技术、散斑法振动测量技术、莫尔条纹法、全息干涉法振动测量技术等。
3.其中,多普勒参考光振动测量技术主要利用光外差技术和光学多普勒效应实现,包括外差式振动测量技术和零差式振动测量技术。零差式振动测量技术不需要对参考光进行移频处理,省去了声光移频器件,简化了光学系统。但由于光学系统和电学系统在零中频处存在较大的系统噪声以及干扰,因此零差式振动测量技术的抗干扰能力不如外差式振动测量技术。外差式振动测量技术的工作原理是使进入光电探测器中的相互干涉的两路光信号的载波频率不同,形成干涉后将产生差频信号。为了提高测量系统的抗干扰能力,通常采用声光调制器将信号光预先移到一个较高频率的方式,移频频率通常为40mhz或 55mhz。
4.在美国专利申请“tunable optical frequency converter basedon a doppler vibration mirror”(us 2014/0327956 a1)中,发明人提出了基于多普勒振动反光镜的可调移频模块。该模块采用反光镜和少量的光学器件实现了具有大的频率转换范围、高的变频效率和大的输出功率。但是,该技术方案仅仅涉及光学移频功能,并未考虑振动测量功能。另外,在中国专利申请“一种脉冲激光外差多普勒测振测量结构”(cn 105043527 a)中,发明人提出了利用脉冲信号来控制两个声光调制器,并分别利用两个镜头实现激光的反射和接收,以实现远距离的振动测量。但是,该技术方案需要使用两个镜头,具体进行振动测量时对焦难度较大。
5.总之,现有外差式激光振动测量装置因为光学器件的端面反射和环形器有限的隔离度,都会在一定程度上存在载波泄漏信号。该载波泄漏信号和测量信号在频谱上是完全重叠的。在远距离测量时,载波泄漏信号对测量信号解调的影响主要有三方面:一是降低测量信号的信噪比,缩短了测量距离;二是在解调信号时引入非线性;三是振动测量装置在本地的振动会调制到载波泄漏信号中,进一步影响测量精度。
技术实现要素:
6.本发明所要解决的技术问题在于提供一种改进设计的外差式激光多普勒振动测量装置。
7.为了实现上述目的,本发明采用下述的技术方案:
8.一种外差式激光多普勒振动测量装置,包括:
9.光前端模块,包括镜头和激光器,用于通过激光器产生激光,并将所述激光通过所
述镜头发射到外部;
10.子载波插入模块,连接在所述光前端模块和被测物体之间,包括带有反射镜的超声换能器,用于接收所述光前端模块经由所述镜头发射的激光,将所述激光反射到所述被测物体,并将所述被测物体漫反射回来的光再次反射回到所述镜头;其中,
11.所述反射镜以预定频率和预定振幅振动,在振动测量光路上引入预定频率和预定振幅的光程变化。
12.其中较优地,所述超声换能器以预定频率带动所述反射镜一起振动。
13.其中较优地,所述子载波插入模块还包括超声信号源;所述超声信号源配置为产生预定频率的电信号,将所述电信号输出到所述超声换能器以便所述超声换能器将所述电信号转换为超声振动。
14.其中较优地,所述反射镜和所述超声换能器刚性连接,与所述镜头轴线夹角为45度。
15.其中较优地,所述外差式激光多普勒振动测量装置还包括:信号处理模块,与所述光前端模块连接,包括功分器、上边带滤波器、下边带滤波器和合路器;其中,
16.所述功分器,用于接收所述光前端模块输出的中频信号,并将所述中频信号进行功率分配得到两路信号,所述两路信号中的一路信号流入所述上边带滤波器,另一路信号流入所述下边带滤波器;
17.所述合路器,用于将所述上边带滤波器处理过的信号和所述下边带处理过的信号进行合并,并输入到下级处理模块。
18.其中较优地,所述信号处理模块还包括放大器、抗混叠滤波器、模数变换器和fpga处理器;其中,
19.所述放大器,用于对所述光前端模块输出的中频信号进行放大,并将放大后的中频信号输送到所述功分器;
20.所述抗混叠滤波器,用于接收所述合路器输出的信号,并将所述输出的信号进行抗混叠滤波;
21.所述模数变换器,用于接收所述抗混叠处理后的上下边带信号,并将所述抗混叠处理后的上下边带信号从模拟形式转换为数字形式;
22.所述fpga处理器,用于在数字域对上下边带信号进行解调以获取所述被测物体的振动参数。
23.其中较优地,所述光前端模块和所述子载波插入模块在结构上采用吸声或减振材料以避免超声信号被所述光前端模块拾取。
24.与现有技术相比较,本发明实施例提供的外差式激光多普勒振动测量装置,在光路上增加了子载波插入模块。该模块在振动测量光路上引入特定频率、特定振幅的光程变化。这样的设计能够提高调制信号的信噪比,在镜头口径和激光输出功率受限的条件下增加测量距离。而且,该设计使得测量信号解调的线性度提高,主要原因是没有载波泄漏信号的非线性干扰。并且,测量信号的噪声相对传统系统更加平稳,有利于信号后处理以进一步提升精度。再者,振动测量装置在本地的振动对目标物振动信号的影响减弱,因此不需要采用双光路探测的方式抑制共模干扰信号。
附图说明
25.图1为现有技术中,外差式激光振动测量装置的工作原理图;
26.图2为现有技术中,载波泄漏信号的示意图;
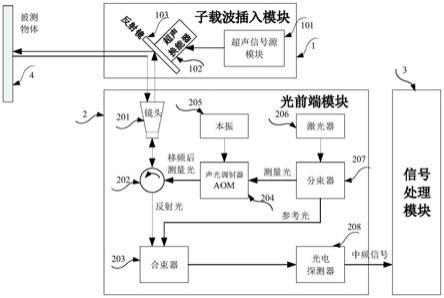
27.图3为本发明实施例提供的外差式激光多普勒振动测量装置的整体结构示意图;
28.图4为第一类贝塞尔函数曲线的示意图。
29.图5为本发明实施例中,载波泄漏信号的示意图。
30.图6为本发明实施例中,信号处理模块的结构示意图。
具体实施方式
31.下面结合附图和具体实施例对本发明的技术内容进行详细具体的说明。
32.如图1所示,在现有技术的一个示例中,该外差式激光振动测量装置包括激光器101a、分束器102a、声光调制器(aom)103a、本振104a、环形器105a、镜头106a、合束器107a、光电探测器108a和解调器109a。其中,激光器101a输出的激光经过分束器102a后分为了两路光信号,一路用于实现参考光,一路用于实现测量光。其中测量光经过声光调制器103a后实现频移。为了实现频移功能,声光调制器需要本振104a提供一个角频率为ω
c
的本振信号。移频后的测量光经过镜头106a照射在待测量的振动物体110a表面上,并经漫反射又回到镜头106a中。反射光与参考光干涉后经过光电探测器108a的转化便获得已调制了振动参数的中频信号,而该中频信号的角频率正好为ω
c
。
33.在图1所示的外差式激光振动测量装置中,除了测量光和参考光外,还存在频率和测量光相同的泄漏光。泄漏光和参考光干涉后,再经光电探测器转化就会产生载波泄漏信号。该载波泄漏信号也称为残留载波 (residual carrier),是外差式激光振动测量无法避免的问题,其主要表现是在测量信号中存在一个窄带干扰信号,如图2所示。载波泄漏信号形成的原因主要有两个:1)环形器的有限隔离度,即部分测量光直接泄漏到接收光路中;2)光学器件端面反射,如镜头端面、光纤端面等,如图1所示。
34.理想的中频信号是一个幅度恒定的调频信号,其相干解调的基本原理是经过正交下变频、低通滤波器、求解相位、差分后就可以获得多普勒频移信号。但实际的中频信号因各种非理想原因,不仅幅度不恒定,还存一个载波泄漏干扰信号。非理想状态下的中频信号的表示公式如下:
35.s
total
(t)=a
sig
(t)cos[ω
c
t+φ
sig
(t)]+a
lk
(t)cos[ω
c
t+φ
lk
(t)]
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0036]
其中,a
sig
(t)为测量信号随时间变化的幅度,φ
sig
(t)为多普勒相位,a
lk
(t) 为载波泄漏的幅度,φ
lk
(t)为载波泄漏的相位。对公式1定义的中频信号进行正交下变频和低通滤波器后获得的i路信号和q路信号如下式(2)和 (3)所示:
[0037]
i
total
(t)=a
sig
(t)cos[φ
sig
(t)]+a
lk
cos[φ
lk
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0038]
q
total
(t)=a
sig
(t)sin[φ
sig
(t)]+a
lk
sin[φ
lk
]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0039]
经过相位解调得:
[0040][0041]
当a
sig
(t)>>a
lk
时,此时载波泄漏信号的影响可以忽略,则有:
[0042]
phase(t)≈φ
sig
(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0043]
当a
sig
(t)<<a
lk
时,此时多普勒信号的影响可以忽略,则有:
[0044]
phase(t)≈φ
lk
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)
[0045]
从公式(4)可知,载波泄漏信号的影响主要是在相位解调过程中引入了非线性成分,进而降低了测量的精度。最大的相位误差δφ
sig
(t)可以由以下公式(7)表示。根据公式(7),当要求测相精度小于0.01π时,测量信号应大于载波泄漏信号30db。但在实际测量中,很难满足上述条件,因此一般需要估计泄漏信号相关参数,并由此对测量结果进行补偿。
[0046][0047]
通过上述分析可知,外差式激光振动测量装置因为光学器件的端面反射和环形器有限的隔离度,都会存在或多或少的载波泄漏信号。该载波泄漏信号和测量信号在频谱上是完全重叠的。在远距离测量时,载波泄漏信号对测量信号解调的影响主要有三方面:一是降低测量信号的信噪比,缩短了测量距离;二是在解调信号时引入非线性;三是振动测量装置本地的振动会调制到载波泄漏信号中,进一步影响测量精度。
[0048]
为了从根本上解决上述问题,本发明提出了一种改进设计的外差式激光多普勒振动测量装置。它通过主动利用超声振动引入光程的周期变化,将测量信号和载波泄漏信号在频域上分离,然后再通过滤波器将测量信号提取出来以便进行解调。
[0049]
图3为本发明实施例提供的外差式激光多普勒振动测量装置的示意图。该外差式激光多普勒振动测量装置和传统的振动测量光路不同的是:在光路上增加了一个带有反射镜的超声换能器。其中,镜头输出激光经过反射镜反射后再用于测量被测物,而被待测物漫反射回来的信号也会经过反射镜后回到镜头中。当超声换能器以角频率ω
sc
(即预定频率)振动时,会带着反射镜一起振动。这一过程会在振动测量光路上引入角频率为ω
sc
的光程变化。经过子载波插入后的总的中频信号如公式(8)所示:
[0050][0051]
其中,s
sig_1
(t)为子载波插入后的测量信号,s
lk
(t)载波泄漏信号,β
fm
为子载波的调频指数(由振幅决定),a
sig
为测量信号的幅度,ω
c
为主载波角频率,ω
sc
为超声换能器的振动角频率(即预定频率),也是子载波角频率,φ
sig
(t)为振动位移对应的相位,a
lk
为泄漏信号的幅度,φ
lk
为泄漏信号的相位。
[0052]
下面对测量信号进行分析,通过三角函数展开可得到公式(9):
[0053][0054]
其中,cos(β
fm sinω
sc
t)和sin(β
fm sinω
sc
t)可以进一步展开成以贝塞尔函数为系数的三角函数,即
[0055][0056]
以上两式中,j
n
(β
fm
)为第一类n阶贝塞尔函数,它是n(n为正整数) 和调频指数β
fm
的函数,其值可通过公式(11)计算。图4给出了n=0、 1、2、3时,贝塞尔函数的曲线。
[0057][0058]
将公式(10)代入公式(9)中,可得公式(12):
[0059][0060]
公式(12)由4项组成:第一项为主载波分量a
sig
cos(ω
c
t+φ
sig
(t))j0(β
fm
),和载波泄漏信号频谱上交叠,属于无用项;第二项 2a
sig
j1(β
fm
)sin(ω
c
t+φ
sig
(t))sinω
sc
t为子载波分量,其中包含了测量信息φ
sig
(t),且幅度可以足够大,属于有用项;第三项为子载波各谐波信号上的余弦分量其中也包含了φ
sig
(t),但由于其幅度较小可不要,也属于无用项;第四项为子载波各谐波信号上的正弦分量其中也包含了φ
sig
(t),但由于其幅度较小,也属于无用项。各频率分量和贝塞尔系数之间的关系如图5 所示。
[0061]
公式(12)还可以整理为
[0062][0063]
从公式(13)可知,贝塞尔系数决定了各载波分量。根据贝塞尔函数性质(公式14)可知子载波插入不会增加信号功率,仅仅是改变各载波上信号的功率分配。
[0064][0065]
图4中,0阶贝塞尔函数j0(β
fm
)是主载波上信号分量的幅度系数,j1(β
fm
)是子载波上信号分量的幅度系数,其他为子载波高次谐波上信号分量的幅度系数。从图4很容易看出,调频指数β
fm
并不是越大越好,而是调频指数β
fm
=1.85时,j
±1(β
fm
)≈0.58为最大值,即子载波上信号幅度最大。此时对子载波上的信号进行解调可以得到最小的功率损耗。子载波信号分为上下边带两个信号成分,很容易推导出:当调频指数β
fm
=1.85时,如果仅对一个边带进行解调的话,则有用信号功率损耗为4.7db;如果对上下边带上的信号同时解调的话,则有用信号功率损耗仅为1.7db。
[0066]
基于上述的理论分析,本发明实施例提供的外差式激光多普勒振动测量装置如图3所示,包括子载波插入模块1、光前端模块2和信号处理模块3。其中,子载波插入模块1包括超声信号源模块101、超声换能器 102和反射镜103,用于在激光振动测量光路上引入特定频率、特定振幅的光程变化。前已述及,与传统的振动测量光路不同的是,本发明实施例提
供的外差式激光多普勒振动测量装置在光路上增加了一个带有反射镜的超声换能器。镜头输出激光经过反射镜反射后再用于测量被测物,而被被测物漫反射回来的信号也会经过反射镜后回到镜头中。当超声换能器以角频率ω
sc
振动时,会带着反射镜一起振动。这一过程会在光路上引入角频率为ω
sc
的光程变化。
[0067]
超声信号源模块101用于产生频率为ω
sc
的余弦电信号。该余弦电信号输出给超声换能器102。超声换能器102用于将电信号转换成超声振动。反射镜103用于反射镜头201输出的激光,并将被测物体4反射回来的光信号再次反射给镜头201,它与超声换能器102采用刚性连接,与镜头轴线夹角为45
°
,并在超声换能器102的带动下以ω
sc
频率进行振动。在本发明的一些实施例中,刚性连接可以是超声换能器以金属抱箍的方式固定反光镜。
[0068]
在一些实施例中,为了减少光强的损耗,反射镜103在预定波长下具有较高的反射率,例如,大于预定阈值,该预定阈值可根据实际应用需要确定,从而使得从反射镜103输出的激光尽可能多地被反射,从被测物体反射回来的光信号尽可能多的反射给镜头。反射镜103还配置为具有较高的平整度,例如,平整度小于预定阈值,该预定阈值可根据工艺要求选定,从而保证更多的光进入探测器。反射镜103还优选地选择重量较轻,例如,小于预定重量,从而保证在超声换能器的作用下振幅较大。
[0069]
在一些实施例中,超声换能器为压电陶瓷换能器。在其他实施例中,还可以选择其他形式的换能器。超能换能器的振动频率需要进行适当的选择,例如,优选为人耳听不见的频率区间,并且频率不能太高,也不能太低。太高了振动幅度不够,太低了会形成较大自干扰。在一些具体的实施例中,超能换能器的振动频率为50khz~100khz。
[0070]
光前端模块2可以采用传统的外差式激光多普勒振动测量光路,其输出载波频率为40mhz的中频信号给信号处理模块3,包括镜头201、环形器202、合束器203、声光调制器204、本振205、激光器206、分束器 207和光电探测器208。其中,激光器206输出的激光经过分束器207后分为了两路光信号,一路用于实现参考光,一路用于实现测量光。测量光经过声光调制器后实现频移,为了实现该功能声光调制器204需要本振205提供一个角频率为ω
c
的本振信号。移频后的测量光经过镜头201 照射在待测量的振动物体表面上,并经漫反射又回到镜头中。反射光与参考光干涉后经过光电探测器208的转化便获得已调制了振动参数的中频信号,而该中频信号的角频率正好为ω
c
。对于光前端模块2内的各个模块,可以采用本领域已知的适于外差式激光多普勒振动测量的各种器件实现。
[0071]
在本发明的一些实施例中,光前端模块2和子载波插入模块1在结构上采用吸声或减振材料以避免超声信号被光前端模块2拾取。例如,可以在光前端模块和子载波插入模块上设置橡胶皮垫。
[0072]
传统的振动测量装置仅需要对主载波上的测量信号进行解调就能获得振动参数,而本发明实施例提供的外差式激光多普勒振动测量装置输出的中频信号,需要同时对子载波的上下边带两个信号进行解调后再合并,以避免测量信号的功率浪费。图6示出了根据本发明实施例的信号处理模块的结构示意图。其中,信号处理模块3用于对包含测量参数的子载波信号进行解调,包括放大器301、功分器302、上边带滤波器303、下边带滤波器304、功合器305、抗混叠滤波器306、adc(模拟数字转换器)307和fpga(现场可编程逻辑门阵列)处理器308。
[0073]
从光前端模块2输出的中频信号输入信号处理模块3,经过放大器 301放大后利用
功分器302(power divider,全称为功率分配器)分为两路,一路经过上边带滤波器303以提取上边带信号,一路经过下边带滤波器304以提取下边带信号。需要指出的是,可以采用本领域已知的各种边带滤波器进行边带滤波处理,在本发明中对其不进行具体限定。
[0074]
经过上边带滤波器303提取的上边带信号和经过下边带滤波器304 提取的下边带信号经过功合器305(也称为合路器)后合成一路信号,输入到抗混叠滤波器306。抗混叠滤波器306对合成信号进行抗混叠滤波处理。需要说明的是,抗混叠滤波可以采用本领域已知的各种抗混叠滤波处理算法,在本发明中对其不进行具体限定。
[0075]
经过抗混叠滤波器处理后的信号,通过模数转换器307将模拟信号转换为数字信号,并输出给fpga处理器308。fpga处理器308在数字域分别对上下边带的信号进行解调,从而获得被测物体的振动参数。
[0076]
与现有技术相比较,本发明实施例提供的外差式激光多普勒振动测量装置,具有如下的优点:一是提高了调制信号的信噪比,在镜头口径和激光输出功率受限的条件下增加了测量距离;二是测量信号解调的线性度高,主要原因是无载波泄漏信号的非线性干扰;三是测量信号的噪声相对传统的外差式激光振动测量装置更加平稳,有利于信号经过后处理进一步提升精度;四是振动测量装置在本地的振动对目标物振动信号的影响减弱,因此不需要采用双光路探测的方式来抑制共模干扰信号。
[0077]
需要指出的是,上面所描述的实施例仅是本发明实施例的一部分,而不是全部。上面所述的各种实施例,可以根据需要进行各种组合。本发明说明书中使用的术语和措辞仅仅为了举例说明,并不意味对本发明的权利要求构成限定。
[0078]
本领域技术人员应当理解,在不脱离所公开的实施例的基本原理的前提下,对上述实施例中的各细节可进行各种变化。因此,本发明的范围只由权利要求确定,在权利要求中,除非另有说明,所有的术语应按最宽泛合理的意思进行理解。
[0079]
对本领域的一般技术人员而言,在不背离本发明实质内容的前提下对它所做的任何显而易见的改动,都将构成对本发明专利权的侵犯,将承担相应的法律责任。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1