一种视觉检测系统的制作方法
1.本发明涉及工业机器人抓取技术领域,更具体地说,它涉及一种视觉检测系统。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。
3.目前,很多工厂都开始使用工业机器人来进行零部件的抓取和放置,以使零部件能从某一位置置于另一指定位置。工业机器人抓取和放置零部件时,需要精准可靠的视觉检测系统,才能达到较好的抓取和放置目的,然而传统的视觉检测系统通常通过肉眼观测机器人的运动情况,因此很难及时发现障碍物的类型和尺寸,且无法及时检测出机器人与障碍物之间的距离,无法实现机器人自动越障。另外,现有工业机器人的机械手不管零部件是什么形状、种类,都是通过左右两侧设置有夹手的机械手从零部件侧部进行夹取,如此一来,机械手夹取和放置过程中需要较大空间,否则无法从零部件两侧进行夹取和放置。且不同形状、种类的零部件最好采用不同机械手来操作,这样才能更好实现零部件的夹取和放置。
4.有鉴于此,本发明提供一种新型的视觉检测系统,可以精准控制工业机器人运动,以实现零部件的夹取和放置,同时针对柱状且顶部带有凸缘的零部件,提供一种新型的工业机器人机械手进行夹取。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种视觉检测系统,可以精准控制工业机器人运动,以实现零部件的夹取和放置,同时还能由上往下进行零部件的夹取和放置。
6.为实现上述目的,本发明提供了如下技术方案:
7.一种视觉检测系统,用于控制工业机器人运动,以实现零部件的夹取和放置,所述工业机器人包括机器人本体和机械手,包括摄像头和控制系统;
8.所述摄像头安装在所述工业机器人的所述机械手上,所述控制系统包括计算机、图像采集卡和视觉传感器,所述视觉传感器和所述图像采集卡一端分别与所述计算机无线通信连接,另一端分别与所述摄像头无线通信连接;
9.所述零部件包括柱体和连接在所述柱体顶部四周的凸缘,所述计算机用于控制所述机械手由上往下夹住所述凸缘,以将零部件置于指定位置。
10.进一步优选为:所述机械手包括端头、中心体、抓手、套筒、竖向弹簧、定位机构和电机;
11.所述抓手包括抓取块和连接弹簧,所述抓取块位于所述端头下方外侧,所述抓取块转动连接在所述中心体外表面且用于从所述柱体相对两侧勾住所述凸缘,以将所述柱
体、凸缘提起,所述连接弹簧位于所述抓取块与所述中心体连接处的下方,且所述连接弹簧一端与所述中心体连接,另一端与所述抓取块连接,所述中心体底面用于与所述零部件顶面接触;
12.所述端头内设置有空腔和插槽,所述套筒套设在所述中心体表面且位于所述空腔和所述插槽内,所述竖向弹簧下端与所述套筒固定,上端与所述空腔内顶部固定;
13.所述中心体顶部插设在所述插槽内,所述定位机构用于限位固定所述中心体,以使所述中心体限位固定在所述插槽内,所述电机位于所述插槽上方且用于带动所述中心体转动。
14.进一步优选为:所述中心体包括由上至下依次设置的定位部、连接柱和接触部;
15.所述抓取块转动连接在所述接触部上,所述接触部位于所述端头下方且用于与所述零部件顶面接触,所述套筒套设在所述连接柱外表面,所述套筒位于所述定位部和所述接触部之间;
16.所述竖向弹簧位于所述连接柱外部的相对两侧且处于所述空腔内,所述套筒包括圆筒部和连接在所述圆筒部底部的抵紧部,所述抵紧部上开设有下安装孔,所述空腔内顶部开设有上安装孔,所述竖向弹簧上端固定在所述上安装孔内,下端固定在所述下安装孔内。
17.进一步优选为:所述定位部表面开设有定位孔,所述定位机构包括定位珠、盲孔和抵紧弹簧;
18.所述盲孔开设在所述插槽侧壁,所述抵紧弹簧位于所述盲孔内且一端与所述盲孔内底部固定,另一端与所述抵紧弹簧固定;
19.所述定位珠与所述定位孔相适配,所述定位珠用于弹入所述定位孔内,以使所述定位部限位固定在所述插槽内,所述定位珠靠近所述抵紧弹簧一侧设置有限位部,所述盲孔孔口处设置有用于限制所述限位部脱离所述盲孔的挡边。
20.进一步优选为:所述盲孔侧壁开设有滑槽,所述限位部嵌在所述滑槽内且与所述滑槽滑动配合,所述滑槽长度方向与所述盲孔轴向方向相同。
21.进一步优选为:所述定位珠为电磁铁,所述定位部采用铁质材料制成。
22.进一步优选为:所述端头包括连接杆和连接在所述连接杆下端的操作头,所述电机位于所述连接杆内,所述插槽位于所述操作头内;
23.所述定位部顶部开设有定位槽,所述电机输出轴上固定有主轴,所述主轴上端与所述电机输出轴连接,下端向下延伸至所述插槽内且用于插设在所述定位槽内,所述主轴与所述定位槽相适配;
24.所述定位槽为矩形槽或椭圆形槽。
25.进一步优选为:所述抓取块包括抓取块本体、钩起部和倾斜部,所述钩起部位于所述抓取块本体底部且用于勾住所述凸缘,所述倾斜部位于所述抓取块本体上部靠近所述抵紧部一侧,所述操作头下端位于所述倾斜部和所述抵紧部之间,所述操作头下端外表面设置有用于与所述倾斜部接触的斜面。
26.进一步优选为:所述定位机构设置有两个,两个所述定位机构对称设置在所述定位部的相对两侧。
27.进一步优选为:所述抓取块至少设置有两个,所述电机为步进电机。
28.综上所述,本发明具有以下有益效果:工业机器人在进行零部件夹取和放置时,需要精准定位,才能达到预定效果。为此,本发明在工业机器人的机械手上安装了用于实时监控的摄像头,并通过图像采集卡和视觉传感器来获取图像、视频并进行分析处理,以便通过计算机控制控制机器人完成零部件的夹取和放置工作。
29.工作时,先通过摄像头精准定位,然后通过计算机控制工业机器人运动,以使工业机器人位于零部件正上方,此时再控制机械手下压,当接触部与零部件顶部接触后再下压,以使中心体、抓手向上移动,此时主轴将插设在插槽内,由于抓取块本体转动连接在接触部上,且操作头夹在抓取块本体上部内侧与套筒之间,抓取块本体下部与接触部通过连接弹簧连接,因此当接触部与零部件顶部接触后再继续下压时,抓取块本体将绕转轴转动,以使钩起部向靠近零部件方向移动,从而勾住凸缘。待钩起部勾紧凸缘后,启动电机,以通过主轴带动中心体、抓手转动到一定角度,此时定位珠刚好与定位孔对准,从而定位珠将自动弹入定位孔中进行限位固定,以限制中心体向下移动。优选的,对于一些质量较重的零部件,当定位珠弹入定位孔内后,定位珠可通电,以使定位珠与定位部磁性连接,从而增强定位部的限位固定能力。此时机械手便可将零部件提起,并将其置于指定位置,然后松开抓手即可。抓手松开时,只需启动电机,以使通过主轴带动中心体、抓手反向转动到开始位置,定位珠将缩回盲孔内,此时中心体没有了限位固定的作用,因此机械手向上移动时,在重力及竖向弹簧作用下,抓手将自然松开,此时零部件将置于指定位置处。
30.本发明可以精准控制工业机器人运动,以实现零部件的夹取和放置,同时还能由上往下进行零部件的夹取和放置,适用于夹取和放置柱状且顶部带有凸缘的零部件,针对性较强。
附图说明
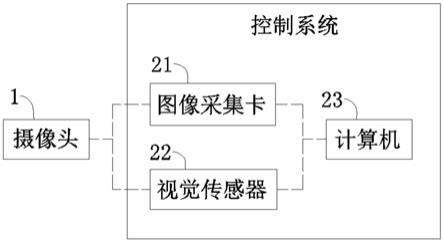
31.图1是实施例的结构示意图,主要用于体现视觉检测系统的架构图;
32.图2是实施例的剖视示意图,主要用于体现工业机器人机械手的结构;
33.图3是实施例的剖视示意图,主要用于体现抓取块的安装结构;
34.图4是实施例的剖视示意图,主要用于体现定位机构的安装结构。
35.图中,1、摄像头;21、图像采集卡;22、视觉传感器;23、计算机;31、连接杆;32、操作头;41、柱体;42、凸缘;511、抓取块本体;512、钩起部;513、倾斜部;52、转轴;53、连接弹簧;6、中心体;61、接触部;62、连接柱;63、定位部;64、定位孔;65、定位槽;7、斜面;8、定位机构;81、定位珠;82、盲孔;83、抵紧弹簧;84、滑槽;9、套筒;91、圆筒部;92、抵紧部;10、竖向弹簧;11、上安装孔;12、空腔;13、电机;14、主轴;15、插槽;16、下安装孔。
具体实施方式
36.下面结合附图和实施例,对本发明进行详细描述。
37.实施例:一种视觉检测系统,如图1
‑
4所示,用于控制工业机器人运动,以实现零部件的夹取和放置,工业机器人包括机器人本体和机械手。视觉检测系统包括摄像头1和控制系统,摄像头1安装在工业机器人的机械手上,工业机器人为六自由度机器人。控制系统包括计算机23、图像采集卡21和视觉传感器22,视觉传感器22和图像采集卡21一端分别与计算机23无线通信连接,另一端分别与摄像头1无线通信连接。图像采集卡21用于获取摄像头
1拍摄的零部件环境图像,以计算分析得到夹取或放置零部件上的各种障碍物;视觉传感器22用于获取摄像头1拍摄的零部件视频数据,利用三维重构功能,得到工业机器人的机械手与障碍物之间的距离;计算机23根据上述障碍物、距离,控制机器人完成零部件的夹取和放置工作。优选的,为提高视觉精准度,工业机器人的机械手上可以安装多个摄像头1,以实现无死角监控。
38.在上述技术方案中,工业机器人在进行零部件夹取和放置时,需要精准定位,才能达到预定效果。为此,本发明在工业机器人的机械手上安装了用于实时监控的摄像头1,并通过图像采集卡21和视觉传感器22来获取图像、视频并进行分析处理,以便通过计算机23控制控制机器人完成零部件的夹取和放置工作。
39.参照图1
‑
4,零部件包括柱体41和连接在柱体41顶部四周的凸缘42,柱体41为圆柱状。计算机23用于控制机械手由上往下夹住凸缘42,以将零部件置于指定位置。机械手包括端头、中心体6、抓手、套筒9、竖向弹簧10、定位机构8和电机13。端头包括连接杆31和一体连接在连接杆31下端的操作头32,摄像头1安装在操作头32外部。操作头32内设置有空腔12和插槽15,套筒9套设在中心体6表面且位于空腔12和插槽15内,竖向弹簧10下端与套筒9固定,上端与空腔12内顶部固定。中心体6顶部插设在插槽15内,优选的,中心体6包括由上至下依次一体连接的定位部63、连接柱62和接触部61,定位部63与插槽15相适配且插设在插槽15内。
40.参照图1
‑
4,抓手包括抓取块和连接弹簧53,抓取块位于操作头32下方外侧,抓取块转动连接在中心体6外表面且用于从柱体41相对两侧勾住凸缘42,以将柱体41、凸缘42提起。连接弹簧53位于抓取块与中心体6连接处的下方,且连接弹簧53一端与中心体6连接,另一端与抓取块连接,中心体6底面用于与零部件顶面接触。竖向弹簧10位于连接柱62外部的相对两侧且处于空腔12内,套筒9包括圆筒部91和连接在圆筒部91底部四周的抵紧部92,抵紧部92位于空腔12内且与空腔12侧壁上下滑动配合,圆筒部91位于插槽15和空腔12内。抵紧部92上开设有下安装孔16,空腔12内顶部开设有上安装孔11,竖向弹簧10上端固定在上安装孔11内,下端固定在下安装孔16内。抓取块转动连接在接触部61上,接触部61位于端头下方且用于与零部件顶面接触,套筒9套设在连接柱62外表面,套筒9位于定位部63和接触部61之间。
41.参照图1
‑
4,优选的,抓取块包括抓取块本体511、钩起部512和倾斜部513。钩起部512位于抓取块本体511底部且用于勾住凸缘42。倾斜部513位于抓取块本体511上部靠近抵紧部92一侧,操作头32下端位于倾斜部513和抵紧部92之间,操作头32下端外表面设置有用于与倾斜部513接触的斜面7。接触部61上固定有转轴52,转轴52穿设在抓取块本体511内,连接弹簧53位于转轴52下方。电机13位于插槽15上方且用于带动中心体6转动,电机13为步进电机13。电机13位于连接杆31内,插槽15位于操作头32内,定位部63顶部开设有定位槽65,电机13输出轴上固定有主轴14。主轴14上端与电机13输出轴连接,下端向下延伸至插槽15内且用于插设在定位槽65内,主轴14与定位槽65相适配。定位槽65为矩形槽或椭圆形槽,以使主轴14转动时,定位部63、连接柱62和接触部61能带动抓手一起同轴转动,主轴14中心轴与中心体6中心轴重合。优选的,抓取块沿接触部61圆周方向至少设置有两个,最好的,抓取块沿接触部61圆周方向等间距设置有四个。
42.参照图1
‑
4,定位机构8用于限位固定中心体6,以使中心体6限位固定在插槽15内。
定位部63表面开设有定位孔64,定位机构8包括定位珠81、盲孔82和抵紧弹簧83。盲孔82开设在插槽15侧壁,抵紧弹簧83位于盲孔82内且一端与盲孔82内底部固定,另一端与抵紧弹簧83固定。定位珠81与定位孔64相适配,定位珠81用于弹入定位孔64内,以使定位部63限位固定在插槽15内,定位珠81靠近抵紧弹簧83一侧设置有限位部,盲孔82孔口处设置有用于限制限位部脱离盲孔82的挡边。定位珠81为半椭圆状且外弧面朝向插槽15。盲孔82侧壁开设有滑槽84,限位部嵌在滑槽84内且与滑槽84滑动配合,滑槽84长度方向与盲孔82轴向方向相同。滑槽84设置在盲孔82侧壁的相对两侧。定位机构8设置有两个,两个定位机构8对称设置在定位部63的相对两侧。为了提高定位部63的限位固定作用,优选的,定位珠81为电磁铁,定位部63采用铁质材料制成,以使电磁铁通电时,定位珠81与定位部63磁性连接。
43.在上述技术方案中,工作时,先通过摄像头1精准定位,然后通过计算机23控制工业机器人运动,以使工业机器人位于零部件正上方,此时再控制机械手下压,当接触部61与零部件顶部接触后再下压,以使中心体6、抓手向上移动,此时主轴14将插设在插槽15内,由于抓取块本体511转动连接在接触部61上,且操作头32夹在抓取块本体511上部内侧与套筒9之间,抓取块本体511下部与接触部61通过连接弹簧53连接,因此当接触部61与零部件顶部接触后再继续下压时,抓取块本体511将绕转轴52转动,以使钩起部512向靠近零部件方向移动,从而勾住凸缘42。待钩起部512勾紧凸缘42后,启动电机13,以通过主轴14带动中心体6、抓手转动到一定角度,此时定位珠81刚好与定位孔64对准,从而定位珠81将自动弹入定位孔64中进行限位固定,以限制中心体6向下移动。优选的,对于一些质量较重的零部件,当定位珠81弹入定位孔64内后,定位珠81可通电,以使定位珠81与定位部63磁性连接,从而增强定位部63的限位固定能力。此时机械手便可将零部件提起,并将其置于指定位置,然后松开抓手即可。抓手松开时,只需启动电机13,以使通过主轴14带动中心体6、抓手反向转动到开始位置,定位珠81将缩回盲孔82内,此时中心体6没有了限位固定的作用,因此机械手向上移动时,在重力及竖向弹簧10作用下,抓手将自然松开,此时零部件将置于指定位置处。
44.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和修饰,这些改进和修饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1