一种波束域补偿的匀加速机载雷达杂波抑制方法
1.本发明属于雷达技术领域,涉及一种波束域补偿的匀加速机载雷达杂波抑制方法。
背景技术:
2.在现代战争中,雷达因为其全天候、全天时等优势,逐渐成为军事上必不可少的核心电子装备。其中机载雷达更是因为其探测视野广、机动性强等特点,已成为现代战争中夺取制空权和制信息权,决定现代战争胜负的重要因素。
3.当机载雷达在下视工作时,往往会受到地杂波的影响。且由于载机和地面之间存在相对运动,不同方向的散射点与雷达的相对速度是不同的,杂波会在多普勒域上发生扩散,杂波抑制难度相较于地基固定雷达会明显增加。空时自适应处理(stap)技术可以在空时二维域上对杂波和目标进行区分,实现杂波抑制和目标检测。
4.在杂波特性已知的假设下,全维stap的性能是所有stap处理方法的性能上限。但是在大天线系统情况下,全维stap涉及较高的计算复杂度,且对独立同分布(i.i.d.)样本数的需求较大,难以在实际工程中应用。因此在实际应用中,通常会使用可以大大减少计算量和i.i.d.样本需求的降维stap方法。降维stap是以放弃部分系统自由度,损失杂波抑制性能为代价的,它只能达到杂波抑制的准最优性能。降维stap算法分为固定结构降维算法和自适应降维算法,前者由于其实用性而更受关注。在固定结构的降维stap方法中,由于时域滤波相较空域滤波能获得更低的副瓣,杂波的局域化效果更好,因此多普勒后降维stap方法在实际应用中被更多使用。多普勒后降维stap方法只需要单独考虑每个多普勒通道的杂波分量,分别形成空域或联合域自适应滤波器,能够在较少的i.i.d.样本下得到较好的杂波抑制性能。
5.对于在一个cpi内变速飞行的载机,其加速度往往会使雷达天线的采样点在空间上非均匀分布,导致目标或地面散射点回波的多普勒频率在一个cpi内发生变化,传统的针对匀速直线运动机载雷达的stap技术无法直接应用,给杂波抑制和目标检测带来新的挑战。因此,对变速飞行机载雷达杂波抑制方法进行研究是十分必要的。
技术实现要素:
6.本发明的目的是提供一种波束域补偿的匀加速机载雷达杂波抑制方法,能够减小载机飞行加速度对地面散射点回波的影响,提高杂波抑制性能。
7.本发明所采用的技术方案是,一种波束域补偿的匀加速机载雷达杂波抑制方法,具体按照以下步骤实施:
8.步骤1,确定机载雷达,且机载雷达检测范围内存在目标,设机载雷达向其检测范围内发射信号并经目标反射后接收到的回波信号,记为雷达原始回波数据矩阵x,雷达原始回波数据矩阵x为n
×
k
×
l维的阵元
‑
脉冲
‑
距离域数据,n表示机载雷达天线的阵元数,k表示机载雷达在一个相干积累时间内发射的脉冲数,l表示机载雷达接收到的回波数据包含
的距离单元总个数;
9.步骤2,根据阵元加权fft的切比雪夫加权值,确定阵元fft加权系数矢量β;
10.步骤3,令l=1,l∈{1,2,
…
,l},l表示第l个距离单元;
11.步骤4,对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
,根据机载雷达的距离分辨率,确定第l个距离单元的斜距r
l
,根据第l个距离单元的斜距r
l
,确定第l个距离单元上的散射点的俯仰角根据第l个距离单元上的散射点的俯仰角和多波束形成的角度范围,确定对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值,q的大小和机载雷达天线的阵元数n相等;
12.步骤5,根据步骤4得到的归一化空间频率值和步骤2得到的阵元fft加权系数矢量β,确定第l个距离单元的n
×
k维阵元
‑
脉冲维数据的阵元fft加权变换矩阵f
l
;使用阵元fft加权变换矩阵f
l
对所述第l个距离单元的阵元
‑
脉冲维数据x
l
进行阵元域加权fft变换,得到第l个距离单元波束
‑
脉冲维回波数据y
l
;
13.步骤6,令q=1,q∈{1,2,
…
,q},q表示第q个波束;
14.步骤7,根据机载雷达飞行的加速度a及其它雷达参数,确定对第l个距离单元、第q个波束的k
×
1维杂波数据y
ql
的k
×
1维补偿矢量t
ql
,并根据补偿矢量t
ql
对第l个距离单元、第q个波束的脉冲维回波数据y
ql
进行补偿,得到补偿后的脉冲维数据
15.步骤8,令q的值加1,并重复执行步骤8,得到第l个距离单元的所有q个波束的补偿后的脉冲维数据
16.步骤9,令l的值加1,并重复执行步骤5到步骤9,得到所有l个距离单元的所有q个波束的补偿后的脉冲维数据从而根据所有补偿后的脉冲维数据构建波束域补偿后的n
×
k
×
l维的波束
‑
脉冲
‑
距离域数据
17.步骤10,对步骤9构建的波束域补偿后波束
‑
脉冲
‑
距离域数据在脉冲域进行fft变换,得到波束
‑
多普勒
‑
距离域数据
18.步骤11,对步骤10得到的波束
‑
多普勒
‑
距离域数据进行空时降维自适应处理,得到空时降维自适应处理后的剩余杂波数据z。
19.本发明的特征还在于,
20.步骤2中,阵元fft加权系数矢量β的表达式为:
21.β=[β
0 β1ꢀ…ꢀ
β
n
‑1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0022]
式(1)中,β
n
,n=1,
…
,n表示阵元fft加权系数的每一项,(
·
)
t
表示转置操作。
[0023]
步骤4的具体过程为:
[0024]
步骤4.1,对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
,根据机载雷达的距离分辨率,确定第l个距离单元的斜距r
l
;
[0025]
机载雷达的距离分辨率的表达式为:
[0026][0027]
式(2)中,c表示光速,b表示机载雷达发射信号的带宽;
[0028]
则第l个距离单元的斜距r
l
的表达式为:
[0029]
r
l
=(l
‑
1)δr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0030]
步骤4.2,根据第l个距离单元的斜距r
l
,确定第l个距离单元上的散射点的俯仰角
[0031]
第l个距离单元上的散射点的俯仰角的表达式为:
[0032][0033]
式(4)中,sin
‑1(
·
)表示反正弦函数,h表示载机飞行高度,r
e
=43r
e
表示地球等效半径,r
e
为地球真实半径;
[0034]
步骤4.3,根据第l个距离单元上的散射点的俯仰角和多波束形成的角度范围,确定对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值,q的大小和机载雷达天线的阵元数n相等;
[0035]
假设多波束形成的角度范围为[π
‑
θ
max
,θ
max
],其中θ
max
为形成多波束的波束中心指向的最大方位角;
[0036]
对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值的表达式为:
[0037][0038]
步骤5的具体过程为:
[0039]
步骤5.1,根据步骤4得到的归一化空间频率值和步骤2得到的阵元fft加权系数矢量β,确定第l个距离单元的n
×
k维阵元
‑
脉冲维数据的阵元fft加权变换矩阵f
l
,其表达式为:
[0040][0041]
步骤5.2,使用阵元fft加权变换矩阵f
l
对第l个距离单元的阵元
‑
脉冲维数据x
l
进行阵元域加权fft变换,得到第l个距离单元波束
‑
脉冲维回波数据y
l
,表达式为:
[0042][0043]
式(7)中,(
·
)
h
表示共轭转置操作。
[0044]
步骤7的具体过程为:
[0045]
步骤7.1,根据机载雷达飞行的加速度a及其它雷达参数,得到散射点的时域导向矢量b
q
,通过散射点的时域导向矢量b
q
,确定对第l个距离单元、第q个波束的k
×
1维杂波数据y
ql
的k
×
1维补偿矢量t
ql
;
[0046]
其中,散射点的时域导向矢量b
q
的表达式为:
[0047]
b
q
=b
v,q
⊙
b
a,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0048]
式(8)中,
⊙
表示hadamard积;
[0049][0050][0051]
其中,
[0052]
式(9)
‑
(11)中,v0表示载机飞行的初始速度,a表示载机飞行的加速度,λ
c
表示机载雷达发射信号的波长,t
r
表示机载雷达发射信号的脉冲重复周期,α表示机载雷达天线的安装角,θ
q
表示第q个波束的波束中心指向的方位角;
[0053]
对俯仰角为方位角为θ
q
的散射点的时域导向矢量b
q
中的二次项增量进行补偿的k
×
1维补偿矢量t
ql
;
[0054][0055]
步骤7.2,根据补偿矢量t
ql
对第l个距离单元、第q个波束的脉冲维回波数据y
ql
进行补偿,得到补偿后的脉冲维数据表达式为:
[0056][0057]
步骤9的具体过程为:
[0058]
步骤9.1,根据第l个距离单元的所有q个波束的补偿后的脉冲维数据得到第l个距离单元的补偿后的波束
‑
脉冲维数据
[0059][0060]
步骤9.2,根据第l个距离单元的补偿后的波束
‑
脉冲维数据可以构建波束域补偿后的q
×
k
×
l维的波束
‑
脉冲
‑
距离域数据数据为数据在距离维的堆叠。
[0061]
步骤10的具体过程为:
[0062]
对第l个距离单元的波束域补偿后波束
‑
脉冲维数据进行脉冲域加权fft变换,可以得到第l个距离单元波束
‑
多普勒域回波数据为
[0063][0064]
其中,脉冲域fft变换矩阵为:
[0065][0066]
式(16)中,m是多普勒通道数目,k是相干积累脉冲数,a
i
,i=0,
…
,k
‑
1表示fft加权系数,表示第m个多普勒通道的归一化多普勒频率,表示为表示第m个多普勒通道的归一化多普勒频率;
[0067]
对所有距离单元的波束
‑
多普勒域回波数据均进行脉冲域加权fft变换,可以得到波束
‑
多普勒
‑
距离域数据
[0068]
步骤11的具体过程为:
[0069]
步骤11.1,构造第m个多普勒通道的空时降维矩阵,即:
[0070][0071]
式(17)中,b
m
=[γ
m
‑
1 γ
m γ
m+1
]表示时域降维矩阵;i
n
表示n
×
n维的单位阵,是空域降维矩阵;γ
m
表示脉冲域fft变换矩阵γ的第m列;
[0072]
对于第l个距离单元的波束
‑
多普勒域回波数据可将其整理为nk
×
1维矢量,即:
[0073][0074]
用邻近第l个距离单元的p个训练单元的数据来估计第l个距离单元的杂波加噪声协方差矩阵,即:
[0075][0076]
式(19)中,表示针对第l个距离单元的p个训练单元的数据中的第p个训练单元的数据;
[0077]
步骤11.2,构造目标导向矢量,即:
[0078][0079]
式(20)中,表示kronecker积,为目标回波的归一化多普勒频率,为目标回波的空间频率,表示目标空域导向矢量,为目标时域导向矢量,分别表示为:
[0080][0081][0082]
[0083][0084]
式(21)
‑
(24)中,v表示载机飞行速度,θ0为目标方位角,为目标俯仰角,v
t
为目标径向速度,λ
c
为雷达发射信号波长,f
r
为脉冲重复频率,d为阵元间距。
[0085]
步骤11.3,对于第l个距离单元,第m个多普勒通道的数据可以进行空时降维自适应处理,得到降维后的搜索空时导向矢量,即:
[0086][0087]
降维后的第l个距离单元,第m个多普勒通道的回波数据为:
[0088][0089]
降维后的杂波加噪声协方差矩阵为:
[0090][0091]
式(27)中,表示针对第l个距离单元的p个训练单元中第p个训练单元、第m个多普勒通道的回波数据;
[0092]
在保证目标信号增益不变的前提下,根据线性约束最小准则,计算第l个距离单元,第m个多普勒通道的空时自适应滤波器,表达式为:
[0093][0094]
对第l个距离单元,第m个多普勒通道的回波数据可以降维自适应滤波输出为
[0095][0096]
对波束
‑
多普勒
‑
距离域数据的所有距离单元和多普勒通道数据进行空时降维自适应处理,得到空时降维自适应处理后的剩余杂波数据z。
[0097]
本发明的有益效果是,本发明一种波束域补偿的匀加速机载雷达杂波抑制方法,能够对载机加速度导致的散射点杂波多普勒频率变化进行补偿,且对来自不同方向的杂波回波所补偿的量不同,有效降低杂波抑制后的剩余能量水平,提高输出信杂噪比。
附图说明
[0098]
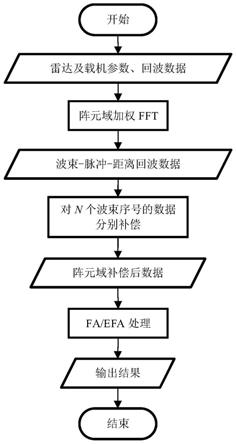
图1是本发明一种波束域补偿的匀加速机载雷达杂波抑制方法的流程图;
[0099]
图2是雷达原始回波数据矩阵的距离多普勒谱图;
[0100]
图3是雷达原始回波数据矩阵沿脉冲维进行加窗傅里叶变换后得到的结果示意图;
[0101]
图4是本发明一种波束域补偿的匀加速机载雷达杂波抑制方法得到的自适应权值图;
[0102]
图5是经过本发明抑制方法抑制后再进行脉冲压缩和距离多普勒处理后得到的结果示意图。
具体实施方式
[0103]
下面结合附图和具体实施方式对本发明进行详细说明。
[0104]
本发明提供一种波束域补偿的匀加速机载雷达杂波抑制方法,如图1所示,具体按照以下步骤实施:
[0105]
步骤1,确定机载雷达,且机载雷达检测范围内存在目标,设机载雷达向其检测范围内发射信号并经目标反射后接收到的回波信号,记为雷达原始回波数据矩阵x,雷达原始回波数据矩阵x为n
×
k
×
l维的阵元
‑
脉冲
‑
距离域数据;
[0106]
其中,n表示机载雷达天线的阵元数,k表示机载雷达在一个相干积累时间内发射的脉冲数,l表示机载雷达接收到的回波数据包含的距离单元总个数;
[0107]
步骤2,根据阵元加权fft的切比雪夫加权值,确定阵元fft加权系数矢量β,其表达式为:
[0108]
β=[β
0 β1ꢀ…ꢀ
β
n
‑1]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0109]
式(1)中,β
n
,n=1,
…
,n表示阵元fft加权系数的每一项,(
·
)
t
表示转置操作;
[0110]
步骤3,令l=1,l∈{1,2,
…
,l},l表示第l个距离单元;
[0111]
步骤4,对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
,根据机载雷达的距离分辨率,确定第l个距离单元的斜距r
l
,根据第l个距离单元的斜距r
l
,确定第l个距离单元上的散射点的俯仰角根据第l个距离单元上的散射点的俯仰角和多波束形成的角度范围,确定对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值;
[0112]
具体过程为:
[0113]
步骤4.1,对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
,根据机载雷达的距离分辨率,确定第l个距离单元的斜距r
l
;
[0114]
机载雷达的距离分辨率的表达式为:
[0115][0116]
式(2)中,c表示光速,b表示机载雷达发射信号的带宽;
[0117]
则第l个距离单元的斜距r
l
的表达式为:
[0118]
r
l
=(l
‑
1)δr
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0119]
步骤4.2,根据第l个距离单元的斜距r
l
,确定第l个距离单元上的散射点的俯仰角
[0120]
第l个距离单元上的散射点的俯仰角的表达式为:
[0121][0122]
式(4)中,sin
‑1(
·
)表示反正弦函数,h表示载机飞行高度,r
e
=43r
e
表示地球等效半径,r
e
为地球真实半径;
[0123]
步骤4.3,根据第l个距离单元上的散射点的俯仰角和多波束形成的角度范围,确定对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值,q的大小和机载雷达天线的阵元数n相等;
[0124]
假设多波束形成的角度范围为[π
‑
θ
max
,θ
max
],其中θ
max
为形成多波束的波束中心指向的最大方位角;
[0125]
对第l个距离单元的n
×
k维阵元
‑
脉冲维数据x
l
进行阵元加权fft的q个归一化空间频率值的表达式为:
[0126][0127]
步骤5,根据步骤4得到的归一化空间频率值和步骤2得到的阵元fft加权系数矢量β,确定第l个距离单元的n
×
k维阵元
‑
脉冲维数据的阵元fft加权变换矩阵f
l
;使用阵元fft加权变换矩阵f
l
对所述第l个距离单元的阵元
‑
脉冲维数据x
l
进行阵元域加权fft变换,得到第l个距离单元波束
‑
脉冲维回波数据y
l
;
[0128]
具体过程为:
[0129]
步骤5.1,根据步骤4得到的归一化空间频率值和步骤2得到的阵元fft加权系数矢量β,确定第l个距离单元的n
×
k维阵元
‑
脉冲维数据的阵元fft加权变换矩阵f
l
,其表达式为:
[0130][0131]
步骤5.2,使用阵元fft加权变换矩阵f
l
对第l个距离单元的阵元
‑
脉冲维数据x
l
进行阵元域加权fft变换,得到第l个距离单元波束
‑
脉冲维回波数据y
l
,表达式为:
[0132][0133]
式(7)中,(
·
)
h
表示共轭转置操作;
[0134]
步骤6,令q=1,q∈{1,2,
…
,q},q表示第q个波束;
[0135]
步骤7,根据机载雷达飞行的加速度a及其它雷达参数,确定对第l个距离单元、第q个波束的k
×
1维杂波数据y
ql
的k
×
1维补偿矢量t
ql
,并根据补偿矢量t
ql
对第l个距离单元、第q个波束的脉冲维回波数据y
ql
进行补偿,得到补偿后的脉冲维数据
[0136]
具体过程为:
[0137]
步骤7.1,根据机载雷达飞行的加速度a及其它雷达参数,得到散射点的时域导向矢量b
q
,通过散射点的时域导向矢量b
q
,确定对第l个距离单元、第q个波束的k
×
1维杂波数据y
ql
的k
×
1维补偿矢量t
ql
;
[0138]
其中,散射点的时域导向矢量b
q
的表达式为:
[0139]
b
q
=b
v,q
⊙
b
a,q
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0140]
式(8)中,
⊙
表示hadamard积;
[0141]
[0142][0143]
其中,
[0144]
式(9)
‑
(11)中,v0表示载机飞行的初始速度,a表示载机飞行的加速度,λ
c
表示机载雷达发射信号的波长,t
r
表示机载雷达发射信号的脉冲重复周期,α表示机载雷达天线的安装角,θ
q
表示第q个波束的波束中心指向的方位角;
[0145]
对俯仰角为方位角为θ
q
的散射点的时域导向矢量b
q
中的二次项增量进行补偿的k
×
1维补偿矢量t
ql
[0146][0147]
步骤7.2,根据补偿矢量t
ql
对第l个距离单元、第q个波束的脉冲维回波数据y
ql
进行补偿,得到补偿后的脉冲维数据表达式为:
[0148][0149]
步骤8,令q的值加1,并重复执行步骤8,得到第l个距离单元的所有q个波束的补偿后的脉冲维数据
[0150]
步骤9,令l的值加1,并重复执行步骤5到步骤9,得到所有l个距离单元的所有q个波束的补偿后的脉冲维数据从而根据所有补偿后的脉冲维数据构建波束域补偿后的n
×
k
×
l维的波束
‑
脉冲
‑
距离域数据
[0151]
具体过程为:
[0152]
步骤9.1,根据第l个距离单元的所有q个波束的补偿后的脉冲维数据得到第l个距离单元的补偿后的波束
‑
脉冲维数据
[0153][0154]
步骤9.2,根据第l个距离单元的补偿后的波束
‑
脉冲维数据可以构建波束域补偿后的q
×
k
×
l维的波束
‑
脉冲
‑
距离域数据数据为数据l=1,
…
,l在距离维的堆叠;
[0155]
步骤10,对步骤9构建的波束域补偿后波束
‑
脉冲
‑
距离域数据在脉冲域进行fft变换,得到波束
‑
多普勒
‑
距离域数据
[0156]
具体过程为:
[0157]
对第l个距离单元的波束域补偿后波束
‑
脉冲维数据进行脉冲域加权fft变换,可以得到第l个距离单元波束
‑
多普勒域回波数据为
[0158][0159]
其中,脉冲域fft变换矩阵为:
[0160][0161]
式(16)中,m是多普勒通道数目,k是相干积累脉冲数,a
i
,i=0,
…
,k
‑
1表示fft加权系数,表示第m个多普勒通道的归一化多普勒频率,表示为表示第m个多普勒通道的归一化多普勒频率;
[0162]
对所有距离单元的波束
‑
多普勒域回波数据均进行脉冲域加权fft变换,可以得到波束
‑
多普勒
‑
距离域数据
[0163]
步骤11,对波束
‑
多普勒
‑
距离域数据进行空时降维自适应处理,得到空时降维自适应处理后的剩余杂波数据z;
[0164]
步骤11.1,构造第m个多普勒通道的空时降维矩阵,即:
[0165][0166]
式(17)中,b
m
=[γ
m
‑
1 γ
m γ
m+1
]表示时域降维矩阵;i
n
表示n
×
n维的单位阵,是空域降维矩阵;γ
m
表示脉冲域fft变换矩阵γ的第m列;
[0167]
对于第l个距离单元的波束
‑
多普勒域回波数据可将其整理为nk
×
1维矢量,即:
[0168][0169]
用邻近第l个距离单元的p个训练单元的数据来估计第l个距离单元的杂波加噪声协方差矩阵,即:
[0170][0171]
式(19)中,表示针对第l个距离单元的p个训练单元的数据中的第p个训练单元的数据;
[0172]
步骤11.2,构造目标导向矢量,即:
[0173][0174]
式(20)中,表示kronecker积,为目标回波的归一化多普勒频率,为目标回波的空间频率,表示目标空域导向矢量,为目标时域导向矢量,分别表示为:
[0175][0176][0177][0178][0179]
式(21)
‑
(24)中,v表示载机飞行速度,θ0为目标方位角,为目标俯仰角,v
t
为目标径向速度,λ
c
为雷达发射信号波长,f
r
为脉冲重复频率,d为阵元间距。
[0180]
步骤11.3,对于第l个距离单元,第m个多普勒通道的数据可以进行空时降维自适应处理,得到降维后的搜索空时导向矢量,即:
[0181][0182]
降维后的第l个距离单元,第m个多普勒通道的回波数据为:
[0183][0184]
降维后的杂波加噪声协方差矩阵为:
[0185][0186]
式(27)中,表示针对第l个距离单元的p个训练单元中第p个训练单元、第m个多普勒通道的回波数据;
[0187]
在保证目标信号增益不变的前提下,根据线性约束最小准则,计算第l个距离单元,第m个多普勒通道的空时自适应滤波器,表达式为:
[0188][0189]
对第l个距离单元,第m个多普勒通道的回波数据可以降维自适应滤波输出为
[0190][0191]
对波束
‑
多普勒
‑
距离域数据的所有距离单元和多普勒通道数据进行空时降维自适应处理,得到空时降维自适应处理后的剩余杂波数据z。
[0192]
仿真实验:
[0193]
(一)实验参数及实验条件
[0194]
本次实验采用的参数如下:
[0195]
1)机载雷达天线采用1行
×
64列的均匀线阵阵列,阵元间距为机载雷达发射波形半波长,则可以得到大小为n
×
k
×
l的雷达回波数据;雷达阵列正侧视阵安放。
[0196]
2)载机1飞行高度为6公里,水平匀速飞行,载机速度为100m/s;载机2飞行高度为6
公里,水平匀加速飞行,载机初始速度为100m/s,加速度为40m/s;两个载机雷达在同一个相干处理间隔内发射450个相干积累脉冲,脉冲重复频率是1.5khz;距离采样频率为2mhz;主波束偏扫,与载机机头的夹角为80
°
;地球半径为6378公里。
[0197]
(二)实验内容及结果分析
[0198]
a.本次实验首先对匀速飞行的载机1的机载雷达原始回波数据和匀加速飞行的载机2的机载雷达原始回波数据进行脉冲压缩,并直接进行降维stap处理,处理结果如图2和图3所示;其中,横坐标表示信号的多普勒通道数,纵坐标表示信号的距离门数,从图2和图3可以对比看出,对匀加速飞行的载机2的机载雷达接收的雷达回波直接进行降维stap处理,相比对匀速机载雷达回波的降维stap处理结果,输出结果的整体能量水平会变高。
[0199]
b.对匀加速飞行的载机2的机载雷达原始回波数据进行脉冲压缩,并按照本发明的流程进行处理;图4和图5分别为对匀速机载雷达回波、匀加速机载雷达回波、波束域补偿数据降维stap处理后的杂波剩余对比图以及改善因子对比图。可以看出本发明方法可以对匀加速机载雷达回波进行有效处理,可以有效降低杂波抑制后的剩余能量水平,提高输出信杂噪比。
[0200]
综上所述,仿真实验验证了本发明的正确性,有效性和可靠性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1