一种基于全站仪和RTK的坐标联合测绘标定方法与流程
一种基于全站仪和rtk的坐标联合测绘标定方法
技术领域
1.本发明涉及坐标标定技术领域,尤其是涉及一种基于全站仪和rtk的坐标联合测绘标定方法。
背景技术:
2.以gps和北斗为代表的全球卫星导航系统在各领域得到了广泛的应用,尤其在自动驾驶与车路协同领域,在室外空旷场景下,基于gps的组合导航系统可以提供满足高等级自动驾驶需求的定位服务且产品成熟度较高,然而,由于室内存在信号遮挡的问题,gps无法在室内条件下提供可靠的定位信息,在一期项目建设中,地下车库采用目前室内定位较为主流的uwb室内定位技术,uwb具有穿透能力强,抗多径效果好,安全性高,系统复杂度低,定位精度高,但同时也存在许多不足,例如uwb通信基站铺设成本较高,无法大范围广泛应用,短期难以推广。
3.目前用于室内定位的方式基本包括uwb或激光雷达slam,在学术研究上有基于相机视觉的室内定位,目前以gps和北斗为代表的全球卫星导航系统只适用于室内开阔场地适用,室内uwb通信基站铺设成本较高,无法大范围广泛应用,短期难以推广,激光雷达slam对环境要求高,且不够稳定可靠,目前并无详细完整的基于全站仪与rtk联合标定二维码坐标的方法。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于全站仪和rtk的坐标联合测绘标定方法。
5.本发明的目的可以通过以下技术方案来实现:
6.一种基于全站仪和rtk的坐标联合测绘标定方法,该方法包括:
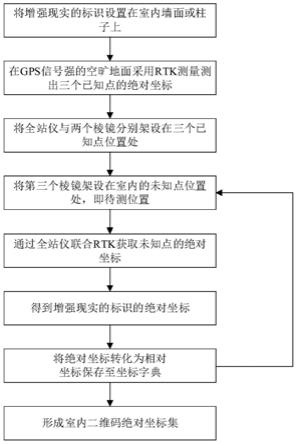
7.s1:将增强现实的标识设置在室内墙面或柱子上;
8.s2:在gps信号强的空旷地面采用rtk测量测出三个已知点的绝对坐标;
9.s3:将全站仪与两个棱镜分别架设在三个已知点位置处;
10.s4:将第三个棱镜架设在室内的未知点位置处,即待测位置;
11.s5:通过全站仪联合rtk获取未知点的绝对坐标;
12.s6:根据未知点的绝对坐标以及未知点和增强现实的标识之间的矢量关系标注出增强现实的标识上的二维码的绝对坐标;
13.s7:将二维码的绝对坐标转化并生成室内的相对坐标后保存至坐标字典;
14.s8:变换未知点,重复s4-s7,形成室内二维码相对坐标集,识别室内的二维码以实现室内高精度定位功能。
15.所述的s1中,增强现实的标识由两块板构成,所述的两块板的外侧可折叠连接,两块板的内侧固定于墙面上,所述的两块板的外侧与墙面的角度为45
°
。
16.所述的增强现实的标识均设于同一高度和同一墙面时,数量为2-4个。
17.所述的增强现实的标识的两块板的表面均贴有二维码,包括aruco码和airtag。
18.所述的二维码边长为45cm,所述的二维码的中心坐标为待测点。
19.所述的s5中,通过全站仪联合rtk获取未知点的绝对坐标的具体过程为:
20.s51:获取全站仪所在位置的绝对坐标;
21.s52:通过全站仪测出全站仪所在位置与未知点的相对距离和角度;
22.s53:根据全站仪所在位置的绝对坐标以及全站仪与未知点的相对距离和角度获取未知点的绝对坐标。
23.所述的s7中,将二维码的绝对坐标转化并生成室内的相对坐标的方法具体为:
24.在室内取一个原点,所有二维码均基于原点转化并生成相对坐标。
25.所述的坐标字典采用经纬高坐标系。
26.所述的坐标字典采用局部坐标下的xyz坐标系。
27.所述的s7中,车辆对室内二维码进行识别,获取二维码的相对坐标以实现车辆的室内高精度定位。
28.与现有技术相比,本发明具有以下优点:
29.一、通过全站仪和rtk的坐标联合测绘标定室内二维码所在的绝对坐标,解决了自动驾驶中室内高精定位难题,且精度控制在10cm以内,航向在5度以内;
30.二、铺设成本低,能大范围广泛应用,对环境要求不高,满足了低成本、稳定可靠的高精定位需求。
附图说明
31.图1为本发明的系统示意图。
32.图2为本发明的流程图。
具体实施方式
33.下面结合附图和具体实施例对本发明进行详细说明。显然,所描述的实施例是本发明的一部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都应属于本发明保护的范围。
34.实施例
35.本发明提供了一种实现基于全站仪和rtk的坐标联合测绘标定方法的系统,包括rtk、全站仪、设置于墙面或柱子上的增强现实的标识和三个棱镜,增强现实的标识为带特征的平面结构,包括aruco码和airtag等,增强现实的标识由两块板构成,两块板的外侧可折叠连接,两块板的内侧固定于柱子上,两块板的表面贴有二维码,二维码边长为45cm,标定时以二维码中心的坐标为待测点。
36.布置增强现实的标识时,两块板的内侧与墙面的角度呈45
°
时为最佳,在特殊布置的场地下,如增强现实的标识全部贴于同一高度和同一墙面,则架设2-4个二维码为最佳。
37.如图1所示,在6个柱子上分别设有上下两个增强现实的标识,共有6组,分别为d1和d2、e1和e2、f1和f2、g1和g2、h1和h2以及j1和j2,全站仪与两个棱镜分别架设三个已知点a、o、b,全站仪位于o点,两个棱镜分别位于a点和b点,第三个棱镜设置在室内的未知点c处,即待测点。
38.如图2所示,本发明通过在室内墙壁或柱子上设置增强现实的标识,并运用全站仪与rtk配合标注出二维码位置的坐标信息,具体步骤如下:
39.s1:将增强现实的标识设置在室内墙面或柱子上;
40.s2:在gps信号强的空旷地面采用rtk测量测出三个已知点的绝对坐标;
41.s3:将全站仪与两个棱镜分别架设在三个已知点位置处;
42.s4:将第三个棱镜架设在室内的未知点位置处,即待测位置;
43.s5:通过全站仪联合rtk获取未知点的绝对坐标;
44.s6:根据未知点的绝对坐标以及未知点和增强现实的标识之间的矢量关系标注出增强现实的标识上的二维码的绝对坐标;
45.s7:将二维码的绝对坐标转化并生成室内的相对坐标后保存至坐标字典;
46.s8:变换未知点,重复s4-s7,形成室内二维码相对坐标集,识别室内的二维码以实现室内高精度定位功能。
47.例如:当标注一个地库的二维码时,取进口闸机位置为原点(0,0),所有二维码的绝对坐标均基于这个原点转化为相对坐标。
48.在s7中,坐标字典采用经纬高坐标系或局部坐标下的xyz坐标系。
49.在s8中,自动驾驶车辆的车载摄像头对室内二维码进行识别,获取室内二维码的绝对坐标信息进而对车辆进行定位。
50.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的工作人员在本发明揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1