一种高精度转子位置测量系统及测量方法
1.本发明涉及一种转子位置测量系统。特别是涉及一种高精度转子位置测量系统及测量方法。
背景技术:
2.高精度转子位置测量是高性能电机控制技术的基础,对于航空电机控制领域尤其如此。在高精度转子位置测量的传感器中,旋转变压器因其抗干扰能力强、安装方便可靠等优点,得到了广泛的应用。
3.旋转变压器的输出为两路包含转子绝对位置信息的高频调制模拟信号,在常见的数字式电机控制中应用时,需要先对这些高频调制模拟信号解码,得到转子绝对位置数字信号。常见的解码方法是使用专用解码芯片,其技术成熟,有较高的精度和较好的性能,但芯片接口电路复杂,而可靠性要求高的航空电机控制领域要求接口尽可能简单。
4.中国发明专利文献cn201110418563.9公开了一种基于单现场可编程门阵列(fpga)的旋转变压器解码处理装置和方法。由fpga输出正弦激励信号,经数模转换电路、缓冲电路功率放大后输入到旋转变压器,旋转变压器输出信号经调理电路、模数转换电路,转换成数字信号给到fpga电路和数字信号处理器(dsp)控制电路计算转子位置和速度。由于采样是在正弦激励波形最高点进行,容易引入误差。而且,该方法需同时使用多种硬件电路,硬件电路接口复杂。中国发明专利文献cn202011024096.7公开了一种高精度高速跟踪轴角转换器及其控制方法,增加了分辨率切换增益控制电路与双宽带电路,提高了转子位置测量精度。但是,此种方法同样存在硬件接口电路过于复杂,使用灵活性低的缺点。
技术实现要素:
5.本发明所要解决的技术问题是,提供一种可高速跟踪和高分辨率地测量转子位置的高精度转子位置测量系统及测量方法。
6.本发明所采用的技术方案是:一种高精度转子位置测量系统及测量方法,系统包括有由dsp芯片构成的数字信号处理单元,还设置有第一幅值调节电路、旋转变压器和第二幅值调节电路,其中,所述数字信号处理单元包括有:用于产生脉宽调制波的pwm模块,用于对接收的电压信号进行模数转换的adc模块,用于对转换后的数字电压信号进行解调的信号解调模块,以及用于将解调后的数字电压信号变换成角度信号输出的角度计算模块;所述pwm模块的输出端连接所述第一幅值调节电路的输入端,将产生的脉宽调制波送入第一幅值调节电路,所述第一幅值调节电路的两个输出端对应连接所述旋转变压器的两输入绕组和端,将脉宽调制波调节生成具有设定幅值的激励信号送入给旋转变压器,所述旋转变压器的转子与被测电机的转子同轴相连,旋转变压器的两个输出端和与所述第二幅值调节电路的输入端相连,在接收的激励信号的激励下,向第二幅值调节电路输出含有电机转子位置信息的调制信号,所述第二幅值调节电路的输出端连接所述adc模块输入端,将与dsp芯片要求电压兼容的含有电机转子位置信息的信号送入adc模块。
7.测量方法,包括如下步骤:
8.1)dsp芯片生成脉宽调制信号uo;
9.2)脉宽调制信号uo经第一幅值调节电路调节生成具有设定幅值的激励信号ui;
10.3)获取并处理含有电机转子位置信息的交流调制信号,得到与dsp芯片要求电压兼容的信号uc和us;
11.4)dsp芯片采样、解调旋转变压器输出的信号uc和us;
12.5)角度计算模块计算输出转子位置信息θ。
13.本发明的一种高精度转子位置测量系统及测量方法,具有如下有益效果:
14.1、通过数字信号处理器dsp直接进行信号的产生与处理,以软件方式实现对转子位置的测量,避免了多种硬件电路的应用,外部仅有幅值调节电路,接口电路非常简单,增强了可靠性,同时使转子位置的检测更加准确。
15.2、采用基于同步旋转坐标系锁相环算法计算转子位置和转速,提供了一个额外的滤波效果,减少了噪声和电磁干扰的影响,并且可高速跟踪和高分辨率地测量转子位置。
16.3、旋转变压器采用方波激励的方式,相比传统的正弦激励方式,不受最高点采样的限制,减小转子位置计算的误差,使用灵活。
附图说明
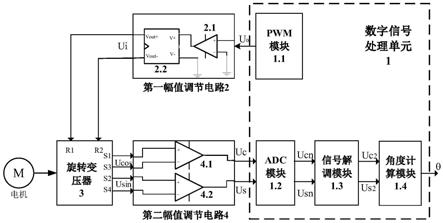
17.图1是本发明高精度转子位置测量系统的构成框图;
18.图2是本发明中角度计算模块的闭环算法结构图;
19.图3a是第一幅值调节电路输出的激励信号ui的波形图;
20.图3b是dsp解调波u
s2
对应转子位置φ的正弦值变化波形图;
21.图3c是第二幅值调节电路输出的uc受幅值随φ的余弦值变化、载波为激励方波信号的调制波形图;
22.图3d是转子转速ω为100πrad/s波形图;
23.图3e是第二幅值调节电路输出的us受幅值随φ的正弦值变化、载波为激励方波信号的调制波形图;
24.图3f是转子位置φ在0~2π内周期变化的相位图,一个周期表示转子转动一圈;
25.图3g是dsp解调波u
c2
对应转子位置φ的余弦值变化波形。
26.图中
27.1:数字信号处理单元
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1.1:pwm模块
28.1.2:adc模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1.3:信号解调模块
29.1.4:角度计算模块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:第一幅值调节电路
30.2.1:第一运算放大器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.2:光电耦合器
31.3:旋转变压器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4:第二幅值调节电路
32.4.1:第二运算放大器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4.2:第三运算放大器
具体实施方式
33.下面结合实施例和附图对本发明的一种高精度转子位置测量系统及测量方法做出详细说明。
34.如图1所示,本发明的一种高精度转子位置测量系统,包括有由dsp芯片构成的数字信号处理单元1,还设置有第一幅值调节电路2、旋转变压器3和第二幅值调节电路4,其中,所述数字信号处理单元1包括有:用于产生脉宽调制波的pwm模块1.1,用于对接收的电压信号进行模数转换的adc模块1.2,用于对转换后的数字电压信号进行解调的信号解调模块1.3,以及用于将解调后的数字电压信号变换成角度信号输出的角度计算模块1.4;所述pwm模块1.1的输出端连接所述第一幅值调节电路2的输入端,将产生的脉宽调制波送入第一幅值调节电路2,所述第一幅值调节电路2的两个输出端对应连接所述旋转变压器3的两输入绕组r1和r2端,将脉宽调制波调节生成具有设定幅值的激励信号送入给旋转变压器3,所述旋转变压器3的转子与被测电机m的转子同轴相连,旋转变压器3的两个输出端s2、s4和s3、s1与所述第二幅值调节电路4的输入端相连,在接收的激励信号的激励下,向第二幅值调节电路4输出含有电机转子位置信息的调制信号,所述第二幅值调节电路4的输出端连接所述adc模块1.2输入端,将与dsp芯片要求电压兼容的含有电机转子位置信息的信号送入adc模块1.2。
35.所述的第一幅值调节电路2包括有第一运算放大器2.1和光电耦合器2.2,所述第一运算放大器2.1的输入端连接所述pwm模块1.1的输出端,所述第一运算放大器2.1的输出端连接所述光电耦合器2.2的输入端,所述光电耦合器2.2的两个输出端连接所述旋转变压器3的两输入绕组r1和r2端。
36.所述的第二幅值调节电路4包括有第二运算放大器4.1和第三运算放大器4.2,所述第二运算放大器4.1的输入端连接所述旋转变压器3的一个输出端s1、s3,所述第三运算放大器4.2的输入端连接所述旋转变压器3的另一个输出端s2、s4,所述第二运算放大器4.1和第三运算放大器4.2的输出分别连接所述adc模块1.2的输入端。
37.本发明实施例中所述的旋转变压器选用ts2640n321e64型号,所述的dsp芯片采用tms320f28335型号,所述的运算放大器选用tl082型号,所述的光电耦合器选用p346型号。
38.本发明所述的高精度转子位置测量方法,包括如下步骤:
39.1)dsp芯片生成脉宽调制信号uo;包括:
40.运行dsp程序,初始化时钟、gpio(通用输入出引脚)、外部中断,设置脉宽调制模块(epwm)通道和脉宽调制模块(epwm)通道的时间中断;每当中断时间到达后,时间中断经pwm模块生成与中断时间间隔对应频率的方波,构成脉宽调制信号uo,并经gpio输出脉宽调制信号uo。
41.2)脉宽调制信号uo经第一幅值调节电路调节生成具有设定幅值的激励信号ui;
42.3)获取并处理含有电机转子位置信息的交流调制信号,得到与dsp芯片要求电压兼容的信号uc和us;包括:
43.旋转变压器定子上的一次侧绕组r1、r2接收激励信号ui,在激励信号ui的激励下,二次侧绕组s1、s3和s2、s4输出含有电机转子位置信息的交流调制信号u
cos
和u
sin
给第二幅值调节电路,经第二幅值调节电路将接收的交流信号调节为与dsp芯片要求电压兼容的直流信号uc和us输出给dsp芯片,用于dsp芯片对直流电压信号uc和us进行采样和解调。
44.旋转变压器定子上的一次侧绕组r1、r2输入激励信号ui,二次侧绕组s1和s3、s2和s4输出u
cos
和u
sin
。当转子转动一定角度时,转子与定子之间产生电磁耦合,转子转动角度φ就会影响电压u
cos
和u
sin
的大小。
[0045][0046]
式中,k表示旋转变压器变比;φ表示电机转子转运动角度;u
cos
和u
sin
经第二幅值调节电路后,输出与dsp芯片要求电压兼容的电压信号uc和us。
[0047]
4)dsp芯片采样、解调旋转变压器输出的信号uc和us;包括:
[0048]
(4.1)dsp芯片输出脉宽调制信号uo后,开始进行电压信号uc和us采样,adc模块将采样得到的模拟电压信号uc和us转换为数字电压信号u
cn
和u
sn
并输出给信号解调模块;
[0049]
(4.2)信号解调模块的解调是依据代表激励信号的方波uo电平进行解调的:当脉宽调制信号uo为低电平时,信号解调模块将数字电压信号u
cn
和u
sn
乘以负一后输出;当脉宽调制信号uo为高电平时,信号解调模块直接输出数字电压信号u
cn
和u
sn
,最终形成解调波u
c2
和u
s2
输出;
[0050]
(4.3)信号解调模块输出解调波u
c2
和u
s2
给角度计算模块。
[0051]
由于解调过程在软件内完成,较传统方法的先硬件解调再采样的方法,由采样间隔造成的转子位置的量化误差得到改善,使转子位置的检测更加准确。
[0052]
5)角度计算模块计算输出转子位置信息θ;
[0053]
所述的转子位置信息θ的计算是采用基于同步坐标系的锁相环角度跟踪算法(srf-pll),如图2所示,角度计算模块具体计算过程包括:
[0054]
(5.1)将接收到的解调波u
c2
和u
s2
分别对应与对角度计算模块输出的未稳定的转子位置角取余弦和正弦后的值相乘;
[0055]
(5.2)取相乘后两个结果的差值;
[0056]
(5.3)对所述的差值进行比例积分微分运算;
[0057]
(5.4)对比例积分微分运算的结果进行积分;
[0058]
(5.5)重复第(5.1)~(5.4),直至计算模块输出的转子位置角稳定后的值,构成最终的转子位置信息θ。
[0059]
本发明所采用的基于同步坐标系的锁相环角度跟踪算法(srf-pll),形式上相当于包括比例积分微分(pid)和积分器的二阶闭环控制器。输入信号得到后,pid闭环系统稳定后,输出的转子位置角度便跟踪到实际的转子位置角度。在pid运算后再加入一个积分环节,使得角度跟随成功后,pid的输出参数便从无意义转换为角速度量,使得算法同时输出速度和位置信息。所述的输入信号是来自解调后的信号u
s2
和u
c2
,其实际上表示具有kum幅度和角度φ的向量在定子固定坐标系中的两个分量。经过派克变换,矢量可以变换成一个角度为θ的旋转坐标系。在这个新的旋转坐标系中,矢量的两个分量是ud和uq的表达式为:
[0060][0061][0062]
式中φ为真实转子位置;θ为输出的转子位置。
[0063]
当θ趋于相等φ,uq分量趋于零,也表示了两个角度之间的偏移误差为0。该闭环控制器通过锁定输入角度使uq分量接近于零。pid的输出给出转子速度测量值ω,积分后给出
转子位置测量值θ。pid控制器提供了一个额外的滤波效果,减少了噪声和电磁干扰的影响。通过包括pid和零极点积分器的二阶闭环控制器,利用反馈不断迭代修正输出的转子位置测量值。转子位置提取算法在主循环中执行,每次中断结束后,进入主循环,利用两组解调信号数组进行运算。首先声明一个角度估计值的变量,角度值以float型数据运算,int型数据输出,利用泰勒函数迭代三次求解估计角度的正余弦运算。将两组解调数组进行减法运算,经过pid调节器,可以输出转子速度信息数据。再经过积分运算,将输出结果进行正余弦运算,然后依次相乘解调信号数组里面的每一个值,将结果再进行减法运算,构成闭环,这样输出的数据便为图2所示的转子位置信息θ和ω。由于本发明使用的是闭环运算算法,相较于传统开环反正切计算法输出的转子位置信息精度更高,并且本发明还具有成本低、使用灵活、稳定性好、简单易行等优点。
[0064]
在本发明的实施例中,p=1000、i=0.001、d=0.0005。
[0065]
图3a、图3b、图3g、图3d、图3e、图3f、图3g是一对转速恒定为100πrad/s的转子位置信息测试实例结果图。图3a显示第一幅值调节电路输出的激励信号ui是幅值为10v、频率10khz的交流方波;图3c、图3e显示第二幅值调节电路输出的uc和us是受幅值随φ的正余弦值变化、载波为激励方波信号的调制波;图3b、图3g显示dsp解调波u
s2
和u
c2
对应转子位置φ的正余弦值变化波形;图3f显示转子位置φ在0~2π内周期变化的相位,一个周期表示转子转动一圈;图3d显示转子转速ω为100πrad/s。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1