一种能同时夹取气阀和进行超声检测的夹爪的制作方法
1.本实用新型涉及机器臂技术领域,尤其涉及一种能同时夹取气阀和进行超声检测的夹爪。
背景技术:
2.近年来,随着科技的不断进步,机器人的技术发展得到有效的提高,而机械臂就是其中研究的一个重要工程,目前,在对物料进行上下料的时候,有的企业是采用机械臂来进行上下料,以此来降低人工的劳动强度。
3.机械臂的研究大大的提高了企业生产的自动化程度,有效的提高企业的生产效率,生产了工件以后,有时候还会对工件进行缺陷检测,目前一般是采用定制的多轴运动的检测方案进行检测。
4.但是,目前的机械臂还是存在着一些问题,目前的机械臂在生产中仅用作上下料,功能性较低,而且采用定制多轴运动的检测方案,较为的不便,并且不方便夹持不同直径的工件,因此提出本实用新型来解决上述问题。
技术实现要素:
5.本实用新型的目的是提供一种能同时夹取气阀和进行超声检测的夹爪,解决了现有技术中机械臂在生产中仅用作上下料,功能性较低,而且想要对工件进行检测的时候,一般都是采用多轴运动的检测方案,较为的不便,并且不方便夹持不同直径的工件的问题。
6.为了实现上述目的,本实用新型采用了如下技术方案:
7.一种能同时夹取气阀和进行超声检测的夹爪,包括机械臂,机械臂通过机械臂连接件固定连接有气动夹爪,气动夹爪的左右夹头上均安装有气阀夹持件,气动夹爪的一侧固定连接有探头杆座,探头杆座末端通过探头连接件安装有超声波探头,两个气阀夹持件之间设置有气阀零件。
8.优选的,两个气阀夹持件相对应一侧的一端均开设有凹槽,且凹槽夹角为120度。
9.优选的,两个凹槽的内侧开设有若干个防滑纹,且若干个防滑纹呈线性阵列分布。
10.优选的,探头杆座长180mm。
11.优选的,超声波探头为水浸超声波探头。
12.优选的,机械臂为6轴机器人。
13.本实用新型至少具备以下有益效果:
14.气动夹爪接入气源后,通过电磁阀开关可实现对气阀零件的夹持和释放,夹持时气动夹爪夹紧,气阀夹持件紧贴在阀杆身上夹紧气阀零件,超声波探头进行使用时,可以通过探头杆座内部的信号线连接到超声波探伤仪。相比较现有技术中机械臂在生产中仅用作上下料,功能性较低,而且想要对工件进行检测的时候,一般都是采用多轴运动的检测方案,较为的不便,并且不方便夹持不同直径的工件的问题,本实用新型气动夹爪在上下料夹持功能之外集成了超声波探头,使得机械臂能同时完成对气阀零件上下料夹取和超声波检
测作业,并且依托6轴机械臂的空间灵活特性,通过机械臂变换不同的位姿,气动夹爪可适配多种规格气阀零件的堆焊、摩擦焊位置的超声波检测,相较于以往定制的多轴运动的检测方案,机械结构有很大的简化,具有很好的通用性、灵活性,并且本实用新型的气动夹爪充分考虑了适配性和和维护性,气阀夹持件能适配多种直径的气阀零件,并且通过更换不同型号的气阀夹持件可进一步扩充适配范围,而且超声波探头通过探头连接件与探头杆座连接,可以很方便的更换超声波探头。
附图说明
15.为了更清楚地说明本实用新型实施例技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
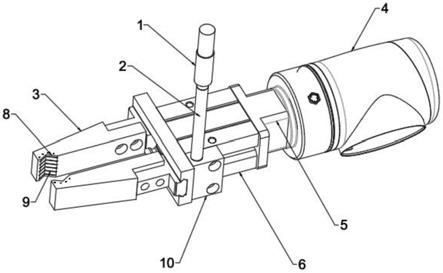
16.图1为本实用新型俯视结构图;
17.图2为本实用新型夹持状态示意图;
18.图3为本实用新型检测状态示意图。
19.图中:1、超声波探头;2、探头杆座;3、气阀夹持件;4、机械臂;5、机械臂连接件;6、气动夹爪;7、气阀零件;8、凹槽;9、防滑纹;10、探头连接件。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.实施例一
22.参照图1
‑
3,一种能同时夹取气阀和进行超声检测的夹爪,包括机械臂4,机械臂4通过机械臂连接件5固定连接有气动夹爪6,气动夹爪6的左右夹头上均安装有气阀夹持件3,气动夹爪6的一侧固定连接有探头杆座2,探头杆座2末端通过探头连接件10安装有超声波探头1,两个气阀夹持件3之间设置有气阀零件7。探头杆座2长180mm。超声波探头1为水浸超声波探头。机械臂4为6轴机器人。
23.具体的,气动夹爪6接入气源后,通过电磁阀开关可实现对气阀零件7的夹持和释放,夹持时气动夹爪夹紧,气阀夹持件3紧贴在阀杆身上夹紧气阀零件7,超声波探头1进行使用时,可以通过探头杆座2内部的信号线连接到超声波探伤仪。本实用新型气动夹爪6在上下料夹持功能之外集成了超声波探头1,使得机械臂4能同时完成对气阀零件7上下料夹取和超声波检测作业,并且依托6轴机械臂4的空间灵活特性,通过机械臂4变换不同的位姿,气动夹爪6可适配多种规格气阀零件7的堆焊、摩擦焊位置的超声波检测,相较于以往定制的多轴运动的检测方案,机械结构有很大的简化,具有很好的通用性、灵活性,并且本实用新型的气动夹爪6充分考虑了适配性和和维护性,气阀夹持件3能适配多种直径的气阀零件7,并且通过更换不同型号的气阀夹持件3可进一步扩充适配范围,而且超声波探头1通过探头连接件10与探头杆座2连接,可以很方便的更换超声波探头1,超声波探头1为水浸超声波探头1,受超声波探伤仪激发可产生超声波检测信号。采用水浸法执行超声检测时,机械
臂4调整姿态使得气动夹爪6上的超声波探头1指向焊接位置,检测内部焊接缺陷。
24.实施例二
25.两个气阀夹持件3相对应一侧的一端均开设有凹槽8,且凹槽8夹角为120度。两个凹槽8的内侧开设有若干个防滑纹9,且若干个防滑纹9呈线性阵列分布。
26.具体的,方便将气阀零件7夹持的更为牢固,避免出现滑脱的现象。
27.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
技术特征:
1.一种能同时夹取气阀和进行超声检测的夹爪,包括机械臂(4),其特征在于,所述机械臂(4)通过机械臂连接件(5)固定连接有气动夹爪(6),所述气动夹爪(6)的左右夹头上均安装有气阀夹持件(3),所述气动夹爪(6)的一侧固定连接有探头杆座(2),所述探头杆座(2)末端通过探头连接件(10)安装有超声波探头(1),两个所述气阀夹持件(3)之间设置有气阀零件(7)。2.根据权利要求1所述的一种能同时夹取气阀和进行超声检测的夹爪,其特征在于,两个所述气阀夹持件(3)相对应一侧的一端均开设有凹槽(8),且凹槽(8)夹角为120度。3.根据权利要求2所述的一种能同时夹取气阀和进行超声检测的夹爪,其特征在于,两个所述凹槽(8)的内侧开设有若干个防滑纹(9),且若干个防滑纹(9)呈线性阵列分布。4.根据权利要求1所述的一种能同时夹取气阀和进行超声检测的夹爪,其特征在于,所述探头杆座(2)长180mm。5.根据权利要求1所述的一种能同时夹取气阀和进行超声检测的夹爪,其特征在于,所述超声波探头(1)为水浸超声波探头。6.根据权利要求1所述的一种能同时夹取气阀和进行超声检测的夹爪,其特征在于,所述机械臂(4)为6轴机器人。
技术总结
本实用新型涉及机械臂技术领域,尤其涉及一种能同时夹取气阀和进行超声检测的夹爪,解决了现有技术中机械臂在生产中仅用作上下料,功能性较低,而且想要对工件进行检测的时候,一般都是采用多轴运动的检测方案,较为的不便,并且不方便夹持不同直径的工件的问题。一种能同时夹取气阀和进行超声检测的夹爪,包括机械臂,机械臂通过机械臂连接件固定连接有气动夹爪,气动夹爪的一侧固定连接有探头杆座,探头杆座末端通过探头连接件安装有超声波探头。本实用新型气动夹爪可适配多种规格气阀零件的堆焊、摩擦焊位置的超声波检测,并且气阀夹持件能适配多种直径的气阀零件,并且通过更换不同型号的气阀夹持件可进一步扩充适配范围。围。围。
技术研发人员:肖潇 吴小超 高伟宏 黄泽平
受保护的技术使用者:常州超声电子有限公司
技术研发日:2021.08.02
技术公布日:2022/1/4
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1