一种基于离子传输的自驱动触觉感知器的制备方法
1.本发明涉及柔性电子器件领域,具体涉及一种基于离子传输的自驱动触觉感知器的制备方法。
背景技术:
2.触觉是智能化设备与智能机器人感知获取外界触觉信息的重要信息来源,同时也是实现机器控制,智能交互的前提,是机器人完成多种复杂任务的基础条件。随着触觉传感器作为核心基础设备的智能技术快速发展,开发具有低功耗,高稳定性、高灵敏度的传感器对于感知外界刺激的人机交互界面、生物医学、智能机器人的发展具有至关重要的意义。然而传统的压力传感机制往往基于电子的传输,其往往避免不了需要功耗高,稳定性差,抗干扰性差等缺点,导致器件布线复杂,长期使用时性能严重衰退进而降低传感精度。因此,触觉感知器需要具备低功耗和长期服役稳定性,以提升其在实际应用过程中的便捷性、适用性与良好的探测性能。
3.基于仿生技术重建人体皮肤的结构或功能是触觉感知器发展和优化的一种有效策略。人体触觉感知是通过跨细胞膜的离子传输将物理刺激转换为电信号的过程,通过对感知器材料和结构的设计可以提高感知器件的灵敏度和机械耐久性,然而机械性能较差的材料导致感知器耐用性不足,限制了其应用。开发具有良好力学性能的纳米材料可以用于制造高性能触觉感知器。另外,基于仿生皮肤触觉转导机制开发具有长时间可靠传感能力的材料和器件仍存在巨大挑战。
技术实现要素:
4.本发明提供了一种基于离子传输的自驱动触觉感知器的制备方法,受人体机械刺激压敏蛋白的启发,研制了一种基于机械电位转换机制的仿生可控离子通道触觉感知器。器件两端活性不同的电极产生稳定的氧化还原电位差,通过压力刺激调控固态电解质间的离子输运性能,产生稳定,可控的电信号输出。该感知器具有自驱动、低功耗与极高的稳定性,在可穿戴电子器件、人机交互界面与人工智能等领域具有重要的应用前景。
5.为了达到上述目的,本发明提供的技术方案是:
6.一种基于离子传输的自驱动触觉感知器的制备方法,其特征在于,本触觉感知器包括:惰性电极、上电解质、纳米纤维间隔、下电解质、活性电极,由上到下依次固定排列。
7.优选的,所述惰性电极和活性电极为可产生电极电位差的柔性导电材料,厚度为50-80μm。
8.优选的,所述上、下电解质层为相同的离子导电型柔性电解质材料,厚度为50-100μm。
9.优选的,所述抗基于离子传输的自驱动触觉感知器的制备过程包括:
10.步骤一:分别制备纳米纤维材料的均匀分散液、低维惰性导电材料的均匀分散液、低维活性导电材料的均匀分散液、离子导电型柔性电解质材料的均匀分散液;
11.步骤二:采用可控静电纺丝的工艺制备柔性高分子材料纳米纤维薄膜,其中,通过浸涂工艺将柔性高分子材料纳米纤维薄膜与低维导电材料的复合,获得柔性良好的惰性电极和活性电极;
12.步骤三:利用刮膜机制备厚度可控的柔性电解质薄膜,采用热压工艺将柔性电解质薄膜和低维导电材料进行紧密贴合产生稳定的电极/电解质界面;通过可控静电纺丝工艺在上、下柔性电解质界面加工纺丝纳米纤维间隔层,构筑可控离子输运通道作为压力敏感层;
13.步骤四:设计合适的器件形状与尺寸,将惰性电极层、上电解质层、纳米纤维间隔层、下电解质层、活性电极层依次垂直叠层排列后,封装得到触觉感知器件。
14.优选的,所述高分子材料包括但不限于聚氨酯、聚偏氟乙烯、聚乙烯醇等有机高分子材料,分散液溶剂为二甲基甲酰胺、四氢呋喃、丙酮的任一种或两种以上组合,分散液浓度为15%wt-30%wt。
15.优选的,所述低维导电材料包括但不限于碳纳米管、石墨烯、mxene、二维层状过渡金属碳化物或碳氮化物、金属纳米线与纳米颗粒,分散溶剂为无水乙醇、去离子水的任意一种,分散液浓度为0.1%wt-3%wt。
16.优选的,所述触觉感知器压力敏感性能的调控主要通过设计压力敏感离子输运通道实现,即压力通过改变上、下柔性电解质之间的接触情况或改变离子输运性能。
17.优选的,步骤二所述通过静电纺丝工艺制备柔性纤维膜基底和纺丝纤维间隔层,制备工艺参数包括:施加电压为18-20kv,给料量为0.5ml/h,纺丝温度为10~40℃,相对湿度为20~50%,接收装置转速为100-3000rpm。步骤三所述热压工艺温度为40-60℃,加载压力为6-10mpa,加载时间60-80s。
18.优选的,所述低维导电材料与柔性电解质材料通过压力加工方式紧密结合,保持稳定的氧化还原反应界面进而保证输出信号的稳定,在受到压力刺激时,仅作为电位差信号的稳定产生界面而非压力敏感层。
19.优选的,所述触觉感知器在经过良好封装后,器件两端电极和电解质经过热压工艺紧密贴合,在未受到压力刺激时,上、下电解质之间由纺丝纤维膜隔离,不输出任何信号,受到压力刺激时,上、下电解质通过纺丝纳米纤维孔洞接触,离子输运性能受压力调控,产生电信号输出。
20.所述触觉感知器待机无需功耗,工作功耗低至nw级别,在5000次静态力循环下具有极高的稳定性。
21.与现有技术相比,本发明的有益效果是:
22.1.提出了一种基于电位机械转换机制的离子型触觉感知器,通过对电极/电解质界面进行紧密的机构设计,构建了稳定的氧化还原界面,实现了超稳定的输出电信号,为自驱动柔性触觉感知器的长期应用奠定了基础。
23.2.发展了基于仿生技术的触觉感知器压力敏感层的设计及其制备方法。该器件待机无需功耗,工作功耗低至nw级别,拥有高的灵敏度和极高的循环稳定性。
附图说明
24.图1为实施例1制备的柔性电极材料的扫描电镜图片;
25.图2为实施例2制备的基于离子传输的自驱动触觉感知器分层结构图和实物图;
26.图3a为实施例2制备的基于离子传输的自驱动触觉感知器电压、电流响应信号;图3b为实施例2制备的基于离子传输的自驱动触觉感知器在不同纺丝纤维间隔下的传感性能;图3c为实施例2制备的基于离子传输的自驱动触觉感知器的压力响应灵敏度图片。
27.图4a为实施例2制备的基于离子传输的自驱动触觉感知器在5000次循环稳定性测试中的信号漂移情况;图4b为实施例2制备的基于离子传输的自驱动触觉感知器5000次静态压力的循环稳定性图片。
28.图5a为实施例2制备的基于离子传输的自驱动触觉感知器的响应、回复时间;图5b为实施例2制备的基于离子传输的自驱动触觉感知器静态力响应信号。
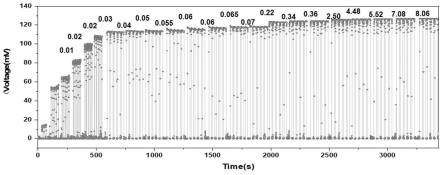
29.图6为实施例2制备的基于离子传输的自驱动触觉感知器在不同静态压力下的响应。
具体实施方式
30.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细描述。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。下面结合附图和具体实施例对本发明作进一步说明,但不作为对本发明的限定。
31.实施例1:
32.柔性复合电极材料的制备过程如下:
33.(1)称量2.0g聚氨酯、3.2g二甲基甲酰胺、4.8g四氢呋喃于玻璃瓶中,放入磁子搅拌溶解,溶解过程中转速为500rpm,加热温度为60℃,磁力搅拌时间为6小时,搅拌结束后将聚氨酯溶液静置2小时去除内部气泡。
34.(2)通过静电纺丝工艺制备柔性薄膜基底,在静电纺丝过程中,使用基材为光滑硅油纸作为接受基材,设置电纺电压为20kv,给料量为0.5ml/h,设置接收装置的转速为200rpm,静电纺丝时间为8小时。纺丝结束后,从基材上将纺丝薄膜剥离,转移至聚四氟乙烯板上干燥,设置干燥温度为50℃,干燥时间为2小时,后得到力学性能优异的柔性薄膜纤维基底。
35.(3)将聚氨酯纤维基底分别浸泡于碳纳米管和mxene水性分散液中,超声2小时,随后将电极材料平铺于聚四氟乙烯板上,真空干燥6小时,设置干燥温度为50℃,剥离得到碳纳米管@纳米纤维和mxene@纳米纤维复合导电电极。
36.图1为实施例1中通过静电纺丝工艺和浸涂法制备的柔性电极材料的扫描电镜图片。其中,mxene导电材料呈大片层导电材料覆盖在纤维膜表面,碳纳米管在纳米纤维网络内部呈现均匀分布的状态,形成交联的导电网络。
37.实施例2:
38.基于离子传输的自驱动触觉感知器的制备过程如下:
39.(1)称量2.0g聚氨酯、3.2g二甲基甲酰胺、4.8g四氢呋喃于玻璃瓶中,放入磁子搅
拌溶解,溶解过程中转速为500rpm,加热温度为60℃,磁力搅拌时间为6小时,搅拌结束后将聚氨酯溶液静置2小时去除内部气泡。
40.(2)通过静电纺丝工艺制备柔性薄膜基底,在静电纺丝过程中,使用基材为光滑硅油纸作为接受基材,设置电纺电压为20kv,给料量为0.5ml/h,设置接收装置的转速为200rpm,静电纺丝时间为8小时。纺丝结束后,从基材上将纺丝薄膜剥离,转移至聚四氟乙烯板上干燥,设置干燥温度为50℃,干燥时间为2小时,后得到力学性能优异的柔性薄膜纤维基底。
41.(3)将聚氨酯纤维基底分别浸泡于惰性电极材料碳纳米管和活性电极材料mxene水性分散液中,超声2小时,随后将电极材料平铺于聚四氟乙烯板上,真空干燥6小时,设置干燥温度为50℃,剥离得到碳纳米管@纳米纤维和mxene@纳米纤维复合导电电极。
42.(4)称量2.5g聚乙烯醇、0.5g甘油、7g去离子水于玻璃瓶中,放入磁子搅拌溶解,溶解过程中转速为500rpm,加热温度为40℃,磁力搅拌时间为6小时,搅拌结束后将聚乙烯醇溶液静置2小时去除内部气泡。通过刮膜机制备聚乙烯醇离子导电型柔性电解质薄膜。
43.(5)通过热压法将柔性电极材料与聚乙烯醇薄膜通过热压法紧密贴合,热压工艺温度为50℃,加载压力为10mpa,加载时间60s。通过上述静电纺丝工艺在两层固态电解质中间加工间隔层,此时静电纺丝时间为30s。将惰性电极、上电解质、纺丝间隔层、下电解质与活性电极依次垂直叠层排列后,使用聚酰亚胺胶带对器件进行封装得到触觉感知器。
44.图2a、b为实施例2制备的基于离子传输的自驱动触觉感知器的结构示意图和实物图,该器件不同电极材料自发产生氧化还原电位差,在受到外界压力刺激时,通过上下电解质的接触调控离子输运性能实现压力感知。图3a、b、c为实施例2制备的基于离子传输的自驱动触觉感知器的压力响应性能,传感器在7000s内电流平均为83.951na,电压为133.28mv,功耗仅为11.19nw,灵敏度在0.05n以内约为1870mv/n,对压力信号响应十分灵敏。
45.图4a、b为实施例2制备的基于离子传输的自驱动触觉感知器的循环稳定性能图。器件在5000个静态力压释循环过程中电压信号仅有0.40%的漂移,并且几乎没有观察到电势损耗的情况发生。图5a、b为实施例2制备的基于离子传输的自驱动触觉感知器在静态压力测试过程中的响应时间与信号特征图,器件响应时间30ms,回复时间30ms,可以实现快速的稳定的静态压力感知和响应。
46.图6为实施例2制备的基于离子传输的自驱动触觉感知器对不同静态压力的感知和响应性能,随着外界压力增大,感知器中的离子输运通道数量增加,离子输运性能增强,导致输出电压信号增大,对于不同静态压力均有稳定平坦的电信号输出平台。因此,基于离子传输的自驱动触觉感知器在静态压力下具备稳定的信号感知能力。
47.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,在任何熟悉本技术领域的技术人员在本发明所述的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内,因此,本发明的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1