一种传感器加工系统及其加工的传感器的制作方法
1.本发明涉及传感器领域,更具体地说是一种传感器加工系统及其加工的传感器。
背景技术:
2.传感器是一种检测装置,能感受到被测量的信息,并能将感受到的信息,按一定规律变换成为电信号或其他所需形式的信息输出,以满足信息的传输、处理、存储、显示、记录和控制等要求;其中限位传感器在机械领域被广发应用,限位传感器在进行限位的过程中,常常是限位的物体接触到限位传感器的触点时对触点进行一定程度的挤压,进而完成传感,而现有技术中还没有一种可以调整触点挤压长度,即可以调整触点被挤压的行程,进而满足不同机械设计需求的限位传感器。
技术实现要素:
3.本发明的目的是提供一种传感器加工系统及其加工的传感器,可以加工挤压长度可以调整的限位传感器。
4.本发明的目的通过以下技术方案来实现:
5.一种传感器,包括传感本体,传感本体上固定连接有支撑柱,支撑柱内间隙配合有接触轮,接触轮向下运动使得传感本体进行传感,支撑柱上连接有接触机构;
6.接触机构包括螺纹盘、限位盘、推动块、连杆、铰接环、滑动柱、倾斜轴肩、圆弧触点和螺纹套,螺纹盘转动连接在支撑柱上,限位盘固定连接在支撑柱上,限位盘上滑动连接有四个推动块,四个推动块均通过螺纹连接在螺纹盘上,四个推动块上均铰接有连杆,四个连杆均铰接在铰接环上,铰接环上滑动连接有滑动柱,滑动柱的两侧均设置有倾斜轴肩,滑动柱的两端均固定连接有圆弧触点,滑动柱的两端均通过螺纹连接有螺纹套,螺纹套和铰接环之间设置有压缩弹簧,螺纹套上设置有多个插孔;
7.一种传感器加工系统,包括加工支架、转换机构和安装机构,加工支架包括支架和滑轨,支架上固定连接有四个滑轨;
8.转换机构包括转换轴、第一双向伸缩机构和装夹卡板,转换轴转动连接在支架上,支架上固定连接有动力机构ⅰ,动力机构ⅰ优选为伺服电机,动力机构ⅰ的输出轴和转换轴之间传动连接,转换轴上固定连接有两个第一双向伸缩机构,第一双向伸缩机构设置有两个伸缩端,每个第一双向伸缩机构的每个伸缩端上均固定连接有两个装夹卡板;
9.安装机构设置有两个,安装机构包括第二双向伸缩机构、滑块、放置筒、伸缩机构、推动转盘、安装转盘和插柱,第二双向伸缩机构固定连接在支架上,第二双向伸缩机构设置有两个伸缩端,第二双向伸缩机构的两个伸缩端上均固定连接有滑块,滑块滑动连接在滑轨上,每个滑块上均固定连接有放置筒,每个放置筒上均固定连接有伸缩机构,每个伸缩机构的伸缩端上均转动连接有推动转盘,每个放置筒上均转动连接有安装转盘,每个放置筒上均固定连接有动力机构ⅱ,动力机构ⅱ优选为伺服电机,动力机构ⅱ的输出轴和安装转盘之间传动连接,安装转盘上固定连接有多个插柱。
附图说明
10.下面结合附图和具体实施方法对本发明做进一步详细的说明。
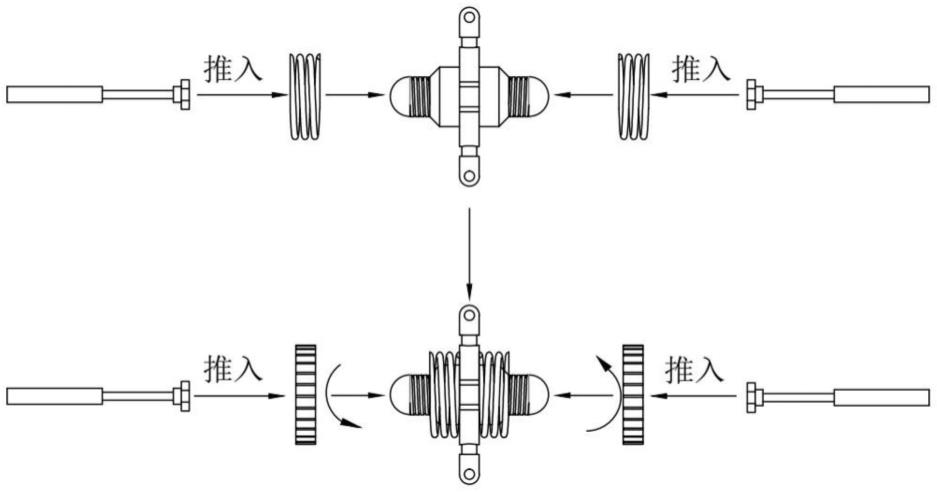
11.图1是本发明的传感器加工系统加工过程示意图;
12.图2是本发明的传感器结构示意图一;
13.图3是本发明的传感器结构示意图二;
14.图4是本发明的接触机构整体结构示意图;
15.图5是本发明的接触机构局部结构示意图一;
16.图6是本发明的接触机构局部结构示意图二;
17.图7是本发明的传感器加工系统整体结构示意图;
18.图8是本发明的加工支架结构示意图;
19.图9是本发明的转换机构结构示意图;
20.图10是本发明的接触机构局部结构示意图;
21.图11是本发明的安装机构结构示意图;
22.图12是本发明的安装转盘和插柱连接结构示意图。
23.图中:
24.传感本体11;支撑柱12;接触轮13;
25.螺纹盘21;限位盘22;推动块23;连杆24;铰接环25;滑动柱26;倾斜轴肩27;圆弧触点28;螺纹套29;
26.支架31;滑轨32;
27.转换轴41;第一双向伸缩机构42;装夹卡板43;
28.第二双向伸缩机构51;滑块52;放置筒53;伸缩机构54;推动转盘55;安装转盘56;插柱57。
具体实施方式
29.下面结合附图对本发明做进一步详细说明。
30.如图1至12所示,下面对一种传感器的结构和功能进行详细的说明;
31.一种传感器,包括传感本体11,传感本体11上固定连接有支撑柱12,其中固定连接的方式可以为通过螺钉将传感本体11和支撑柱12固定连接,支撑柱12内间隙配合有接触轮13,接触轮13向下运动使得传感本体11进行传感,支撑柱12上连接有接触机构;即传感本体11、支撑柱12和接触轮13结构现有技术中传统的限位传感器,当接触轮13受到挤压向下进行运动时,接触轮13在支撑柱12内进行滑动,传感本体11将信号传出,本技术在不改变现有技术中常用的限位传感器的前提下进行改进,可以减少加工的成本;
32.接触机构包括螺纹盘21、限位盘22、推动块23、连杆24、铰接环25、滑动柱26、倾斜轴肩27、圆弧触点28和螺纹套29,螺纹盘21转动连接在支撑柱12上,这里的转动连接可以是带座轴承或者轴承和卡簧构成的轴系,限位盘22固定连接在支撑柱12上,其中固定连接的方式可以为通过螺钉将限位盘22和支撑柱12固定连接,限位盘22上滑动连接有四个推动块23,这里的滑动连接可以通过滑块实现,四个推动块23均通过螺纹连接在螺纹盘21上,螺纹盘21上设置有涡状螺纹线,对应的推动块23上也设置有和螺纹盘21配合的螺纹线,四个推动块23上均铰接有连杆24,这里的铰接可以通过铰接钉来实现,四个连杆24均铰接在铰接
环25上,铰接环25上固定连接有四个铰接座,四个连杆24分别通过铰接钉铰接在四个铰接座上,铰接环25上滑动连接有滑动柱26,这里的滑动连接可以为间隙配合,在铰接环25和滑动柱26之间添加适量的润滑油;
33.滑动柱26的两侧均设置有倾斜轴肩27,滑动柱26的两端均固定连接有圆弧触点28,滑动柱26的两端均通过螺纹连接有螺纹套29,螺纹套29和铰接环25之间设置有压缩弹簧,螺纹套29上设置有多个插孔;
34.使用时,当位于上侧的圆弧触点28和外界接触时,圆弧触点28向下进行运动,圆弧触点28挤压弹簧,圆弧触点28带动滑动柱26向下进行滑动,滑动柱26带动下方的圆弧触点28向下进行运动,圆弧触点28向下进行运动和接触轮13接触,对接触轮13进行挤压,接触轮13向下进行运动完成传感;
35.当需要调整挤压的程度时,即需要挤压到什么时候,才会进行限位传感时,转动螺纹盘21,螺纹盘21在支撑柱12上进行转动,支撑柱12转动时通过螺纹带动四个推动块23相互靠近或者远离运动,四个推动块23带动四个连杆24进行运动,连杆24带动铰接环25进行运动,铰接环25通过弹簧带动滑动柱26进行运动,进而调整圆弧触点28的位置,进而调整滑动柱26受到挤压到什么位置时,传感本体11才会进行传感,进而满足不同机械设计的需求;
36.为了方便制备一种传感器,设计一种一种传感器加工系统,如图1至12所示,下面对一种传感器加工系统的结构和功能进行详细的说明;
37.一种传感器加工系统,包括加工支架、转换机构和安装机构,加工支架包括支架31和滑轨32,支架31上固定连接有四个滑轨32,这里的固定连接可以是通过螺钉完成支架31和滑轨32之间的固定;
38.转换机构包括转换轴41、第一双向伸缩机构42和装夹卡板43,转换轴41转动连接在支架31上,这里的转动连接可以通过轴承座来实现,支架31上固定连接有动力机构ⅰ,这里的固定连接可以通过螺钉实现固定,动力机构ⅰ优选为伺服电机,动力机构ⅰ的输出轴和转换轴41之间传动连接,这里的传动连接可以是带轮传动,转换轴41上固定连接有两个第一双向伸缩机构42,这里的固定连接可以通过螺钉来实现,第一双向伸缩机构42设置有两个伸缩端,第一双向伸缩机构42可以是双头液压缸,每个第一双向伸缩机构42的每个伸缩端上均固定连接有两个装夹卡板43,这里的固定连接可以通过螺钉来实现;
39.安装机构设置有两个,安装机构包括第二双向伸缩机构51、滑块52、放置筒53、伸缩机构54、推动转盘55、安装转盘56和插柱57,第二双向伸缩机构51固定连接在支架31上,这里的固定连接可以通过螺钉来实现,第二双向伸缩机构51设置有两个伸缩端,第二双向伸缩机构51的两个伸缩端上均固定连接有滑块52,这里的固定连接可以通过螺钉来实现,滑块52滑动连接在滑轨32上,每个滑块52上均固定连接有放置筒53,这里的固定连接可以通过螺钉来实现,每个放置筒53上均固定连接有伸缩机构54,这里的固定连接可以通过螺钉来实现,每个伸缩机构54的伸缩端上均转动连接有推动转盘55,这里的转动连接可以通过轴承和卡簧来实现,每个放置筒53上均转动连接有安装转盘56,这里的转动连接可以通过轴承和卡簧来实现,每个放置筒53上均固定连接有动力机构ⅱ,这里的固定连接可以通过螺钉来实现,动力机构ⅱ优选为伺服电机,动力机构ⅱ的输出轴和安装转盘56之间传动连接,这里的传动连接可以时带轮和带的传动,安装转盘56上固定连接有多个插柱57,这里的固定连接可以通过焊接来实现;
40.使用时,将滑动柱26插入到铰接环25内,将铰接环25放置在一侧的四个装夹卡板43之间,如图9所示,启动第一双向伸缩机构42,第一双向伸缩机构42可以是双头的液压缸,即当第一双向伸缩机构42内通入液压时,第一双向伸缩机构42两个伸缩端伸出,当第一双向伸缩机构42内排出液压时,第一双向伸缩机构42的两个伸缩端收回,第一双向伸缩机构42的两个伸缩端带动四个装夹卡板43相互靠近,四个装夹卡板43对铰接环25上的铰接座进行装夹,进而完成铰接环25的装夹;
41.先将铰接环25装夹在放置弹簧的安装机构对应的一侧,多个弹簧放置在两个放置筒53内,多个插柱57对弹簧的外侧进行限位,启动弹簧对应安装机构的第二双向伸缩机构51,第二双向伸缩机构51可以是双头的液压缸,即当第二双向伸缩机构51内通入液压时,第二双向伸缩机构51两个伸缩端伸出,当第二双向伸缩机构51内排出液压时,第二双向伸缩机构51的两个伸缩端收回,第二双向伸缩机构51的伸缩端带动两个滑块52相互靠近,两个滑块52带动两个放置筒53相互靠近,两个放置筒53运动到加工位置,启动对应的伸缩机构54,伸缩机构54可以时液压缸或者电动推杆,伸缩机构54的伸缩端带动推动转盘55进行运动,推动转盘55推动弹簧进行运动,两侧的伸缩机构54同时启动,两个放置筒53内的弹簧同时被推出,进而套装在滑动柱26上,倾斜周肩27和圆弧触点28,可以辅助弹簧插入到滑动柱26上,当两个弹簧插入到滑动柱26上后,启动动力机构ⅰ,动力机构ⅰ的输出轴带动转换轴41进行转动,转换轴41带动放置有弹簧的滑动柱26转动到放置螺纹套29的两个放置筒53之间,启动对应的第二双向伸缩机构51,第二双向伸缩机构51的伸缩端带动两个放置筒53相互靠近运动,在同时启动伸缩机构54和动力机构ⅱ,动力机构ⅱ带动安装转盘56进行转动,螺纹套29通过多个插孔连接在插柱57上,安装转盘56通过多个插柱57带动螺纹套29进行转动,同时伸缩机构54的伸缩端带动推动转盘55进行运动,两个推动转盘55相互靠近运动,两侧的螺纹套29转动方向相反,进而螺纹套29通过螺纹连接在滑动柱26上;
42.如图5和6所示,为加工完成的接触机构部件,再将其和连杆24进行连接,构成接触机构,装置重复运动,加工一次完成后,第一双向伸缩机构42松开,方便对下个进行装夹和加工。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1