一种截面内径圆度料厚快速测量的工作站的制作方法
1.本实用新型涉及机械技术领域,具体地说是一种截面内径圆度料厚快速测量的工作站。
背景技术:
2.在空调压缩机的生产过程中,压缩机壳体的特定截面有内径/外径/圆度/料厚的要求,目前常规方法的测量方法主要是手工测量和三维坐标测量。但是手工测量的缺点是测量位置不准确,测量结果需要人工计算,测量值不精准,测量时间长,无法实现一种量具对多个测量项目结果的输出,测量结果受各方影响导致的误差较大。并且不同规格被测工件需要多种规格的量具和工装,没有通用性。三维坐标测量的方式结果精确,但是测量时间很长,测量操作有门槛。并且三维坐标设备对环境要求高,测量要在专门场地内进行,测量工件需要流转,产品批量测量的成本较高。
技术实现要素:
3.本实用新型为克服现有技术的不足,提供一种截面内径圆度料厚快速测量的工作站,利用激光位移计实现测量,可同时完成内径/外径及厚度的测量。有助于实现筒体等壳体在车间现场的批量检测,提高测量精度,简化测量流程,且能够实现非接触的全周测量方式。
4.为实现上述目的,设计一种截面内径圆度料厚快速测量的工作站,包括工作站框架,其特征在于:所述的工作站框架上方设有测量装置,位于工作站框架下方设有定位装置,所述的测量装置包括测量平台、x向测量导轨、测臂、激光位移计,位于工作站框架内上方设有测量平台,测量平台上一侧设有x向测量导轨,x向测量导轨上通过滑块连接测臂,测臂上设有激光位移计。
5.所述的测臂从左至右分别包括左测臂、主测臂、右测臂,位于左测臂左侧设有左测臂x向气缸,右测臂右侧设有右测臂x向气缸。
6.所述的主测臂上方设有主测臂x向定位装置,主测臂x向定位装置包括主测臂传动皮带、主测臂x向电机、辊轴,位于测量平台一侧的左右两端分别设有辊轴,辊轴上套设主测臂传动皮带,主测臂传动皮带一端连接主测臂下端的滑块,位于一个辊轴处连接主测臂x向电机。
7.所述的测臂与x向测量导轨之间设有z向测量导轨,z向测量导轨下端连接z向测量气缸一端,z向测量气缸另一端连接测臂。
8.所述的定位装置包括z向定位装置、y向定位装置、x向定位装置、旋转平台,位于工作站框架内下部设有z向定位装置,z向定位装置上方设有y向定位装置,y向定位装置上方设有x向定位装置,x向定位装置上方设有旋转平台,旋转平台中心设有激光传感器,激光传感器外侧设有抱紧卡爪,位于旋转平台下端设有旋转电机。
9.所述的z向定位装置包括z向定位电机、z向固定板、z向定位导轨,位于工作站框架
内设有z向固定板,z向固定板一端设有z向定位电机,z向固定板另一端设有z向辊轴,z向辊轴上套设z向传动皮带,位于z向辊轴两侧设有z向定位导轨,z向定位导轨上端设有y向定位装置,位于z向传动皮带一端通过z向连接件连接y向定位装置。
10.所述的y向定位装置包括y向定位电机、y向固定板一、y向定位导轨、y向固定板二,位于z向定位装置上方设有y向固定板一,y向固定板上设有y向定位电机,y向定位电机上方设有y向固定板二,y向固定板二上两侧设有y向定位导轨,y向定位导轨上端设有x向定位装置。
11.所述的x向定位装置包括x向定位电机、x向固定板、x向定位导轨、x向传动皮带,位于y向定位装置上方设有x向固定板,x向固定板上一端设有x向定位电机,x向固定板上另一端设有x向辊轴,x向辊轴上套设x向传动皮带,位于x向辊轴两侧设有x向定位导轨,x向定位导轨上端设有旋转平台,位于x向传动皮带一端通过x向连接件连接旋转平台。
12.所述的工作站框架一侧上方设有信号指示灯。
13.所述的工作站框架一侧设有操作显示屏。
14.本实用新型同现有技术相比,利用激光位移计实现测量,可同时完成内径/外径及厚度的测量。有助于实现筒体等壳体在车间现场的批量检测,提高测量精度,简化测量流程,且能够实现非接触的全周测量方式。
附图说明
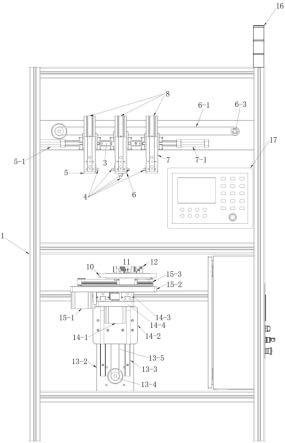
15.图1为本实用新型的结构示意图。
16.图2为本实用新型的侧视图。
17.图3为本实用新型z向测量导轨处的结构示意图。
18.图4为本实用新型定位装置处的局部放大图。
19.图5为本实用新型旋转平台处的结构示意图。
具体实施方式
20.下面根据附图对本实用新型做进一步的说明。
21.实施例一:
22.如图1至图5所示,工作站框架1上方设有测量装置,位于工作站框架1下方设有定位装置,所述的测量装置包括测量平台2、x向测量导轨3、测臂、激光位移计4,位于工作站框架1内上方设有测量平台2,测量平台2上一侧设有x向测量导轨3,x向测量导轨3上通过滑块连接测臂,测臂上设有激光位移计4。
23.测臂从左至右分别包括左测臂5、主测臂6、右测臂7,位于左测臂5左侧设有左测臂x向气缸5-1,右测臂7右侧设有右测臂x向气缸7-1。
24.主测臂6上方设有主测臂x向定位装置,主测臂x向定位装置包括主测臂传动皮带6-1、主测臂x向电机6-2、辊轴6-3,位于测量平台2一侧的左右两端分别设有辊轴6-3,辊轴6-3上套设主测臂传动皮带6-1,主测臂传动皮带6-1一端连接主测臂6下端的滑块,位于一个辊轴6-3处连接主测臂x向电机6-2。
25.测臂与x向测量导轨3之间设有z向测量导轨8,z向测量导轨8下端连接z向测量气缸9一端,z向测量气缸9另一端连接测臂。
26.定位装置包括z向定位装置、y向定位装置、x向定位装置、旋转平台10,位于工作站框架1内下部设有z向定位装置,z向定位装置上方设有y向定位装置,y向定位装置上方设有x向定位装置,x向定位装置上方设有旋转平台10,旋转平台10中心设有激光传感器11,激光传感器11外侧设有抱紧卡爪12,位于旋转平台10下端设有旋转电机。
27.z向定位装置包括z向定位电机13-1、z向固定板13-2、z向定位导轨13-3,位于工作站框架1内设有z向固定板13-2,z向固定板13-2一端设有z向定位电机13-1,z向固定板13-2另一端设有z向辊轴13-4,z向辊轴13-4上套设z向传动皮带13-5,位于z向辊轴13-4两侧设有z向定位导轨13-3,z向定位导轨13-3上端设有y向定位装置,位于z向传动皮带13-5一端通过z向连接件连接y向定位装置。
28.y向定位装置包括y向定位电机14-1、y向固定板一14-2、y向定位导轨14-3、y向固定板二14-4,位于z向定位装置上方设有y向固定板一14-2,y向固定板上设有y向定位电机14-1,y向定位电机14-1上方设有y向固定板二14-4,y向固定板二14-4上两侧设有y向定位导轨14-3,y向定位导轨14-3上端设有x向定位装置。
29.x向定位装置包括x向定位电机15-1、x向固定板15-2、x向定位导轨15-3、x向传动皮带15-4,位于y向定位装置上方设有x向固定板15-2,x向固定板15-2上一端设有x向定位电机15-1,x向固定板15-2上另一端设有x向辊轴15-5,x向辊轴15-5上套设x向传动皮带15-4,位于x向辊轴15-5两侧设有x向定位导轨15-3,x向定位导轨15-3上端设有旋转平台10,位于x向传动皮带15-4一端通过x向连接件连接旋转平台10。
30.工作站框架1一侧上方设有信号指示灯16。
31.工作站框架1一侧设有操作显示屏17。
32.工作站框架1内设有电控柜18。
33.本实施例使用前,在左测臂5右侧、右测臂7左侧、主测臂6左右两侧及下侧分别安装激光位移计。使用时,首先将待测量的筒体固定在旋转平台10上,本实施例的旋转平台10上设置4个抱紧卡爪12将筒体固定住。接着z向定位装置将旋转平台10抬升至测量位置,x向定位电机15-1、y向定位电机14-1带动旋转平台10运动,主测臂x向电机6-2、z向测量气缸9带动主测臂6进行运动,对旋转平台10于主测臂6进行同步微调。保证筒体的两侧伸入主测臂6与左测臂5、右测臂7之际的测量区。接着当旋转平台10上的激光传感器11接收到主测臂6下方的激光位移计4发出的激光时,停止微调,旋转平台10及主测臂6位置固定,同时通过激光位移计4计算出主测臂6平面与旋转平台10的距离。
34.接着将左测臂5、右测臂7处的激光位移计4位置通过z向测量气缸9微调,进行校准。当左测臂5处的激光位移计接收到主测臂6左侧的激光位移计的信号,且右测臂7处的激光位移计接收到主测臂6右侧的激光位移计的信号时,锁定左测臂5、右测臂7的位置。
35.接着进行测量,旋转平台10通过旋转电机进行圆周方向运动,同时主测臂6、左测臂5、右测臂7处的激光位移计4会感受到产品料厚、圆度、内径、外径导致的光程变化,激光位移计4扫描得出内径/外径/圆度/料厚的变化趋势,并将结果转换到显示屏17上。
36.测量完毕后,旋转平台10退出测量区,y向定位电机推出旋转平台10,取下筒体,完成整个测量流程。
37.测量过程中,当出现异常值,信号指示灯16发出警报。
38.本实施例使用时,z向测量气缸9的数量为3个,分别连接主测臂6、左测臂5、右测臂
7,从而与z向测量导轨8配合带动主测臂6、左测臂5、右测臂7上下运动。如图3所示,主测臂6、左测臂5、右测臂7后侧分别设有与z向测量气缸9配合的折边9-1。
39.具体使用时,左测臂x向气缸5-1带动左测臂5在x向测量导轨3上左右运动。右测臂x向气缸7-1带动右测臂7在x向测量导轨3上左右运动。主测臂x向定位装置使用时,主测臂x向电机6-2通过辊轴6-3带动主测臂传动皮带6-1运动,主测臂传动皮带6-1一端连接主测臂6下端的滑块,从而带动主测臂6左右运动。
40.z向定位装置中,z向定位导轨13-3上端通过导轨滑块连接y向固定板一14-2,位于z向传动皮带13-5一端通过z向连接件连接y向固定板一14-2。具体使用时,z向定位电机13-1通过两个z向辊轴13-4带动z向传动皮带13-5动作。z向传动皮带13-5通过z向连接件带动y向固定板一14-2沿z向定位导轨13-3进行上下运动,从而带动旋转平台10进行上下运动。
41.y向定位装置中,y向定位导轨14-3上端通过导轨滑块连接x向固定板15-2。具体使用时,y向定位电机14-1带动x向固定板15-2沿y向定位导轨14-3进行前后运动,从而带动旋转平台10进行前后运动。
42.x向定位装置中,x向定位导轨15-3上端通过导轨滑块连接旋转平台10。具体使用时,x向定位电机15-1通过两个x向辊轴15-5带动x向传动皮带15-4动作。x向传动皮带15-4通过x向连接件带动旋转平台10沿x向定位导轨15-3进行左右运动。
43.本实用新型利用激光位移计实现测量,可同时完成内径/外径及厚度的测量。有助于实现筒体等壳体在车间现场的批量检测,提高测量精度,简化测量流程,且能够实现非接触的全周测量方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1