交叉路口快速通行控制方法及其系统与流程
本发明涉及交通控制技术领域,尤其是一种交叉路口快速通行控制方法及其控制系统。
背景技术:
交通拥堵是城市目前难以治愈的通病,由于交叉路口的车辆汇聚,加之车速慢,使交叉路口成为交通拥堵的重灾区。受城市空间制约,通过扩宽道路来缓解拥堵的方法已竭尽所能,那么剩下的可行途径就是提高交叉路口的通行效率。目前提高通行效率的方法是通过智能交通,改善信号灯的配时周期,减少绿灯浪费。
技术实现要素:
本发明的目的是提供一种交叉路口快速通行控制方法及其控制系统,通过提高车辆在路口的通行速度,提高交叉路口的通行效率。
本发明提出了一种交叉路口快速通行控制方法,其特征在于包括以下步骤:
(1)在路口车道上远离交叉区域一定距离处设置停车线,为该车道上的车辆快速通过路口提供加速距离;
(2)获取路口车辆从停车线起步到到达路口交叉区域的行驶时间;
(3)获取路口红灯开启后已放行车辆全部通过路口的排空时间;
(4)根据所述行驶时间,在路口交叉方向的已放行车辆排空之前提前开启另一方向绿灯,以抵消因停车线后移延迟的路口通过时间。
基于同样的构思,本发明还提出了一种交叉路口快速通行控制系统,包括停车线、第一获取单元、第二获取单元、控制单元、信号灯;其中,把停车线设置在路口车道上远离交叉区域一定距离处,为该车道上的车辆快速通过路口提供加速距离;通过第一获取单元获取路口各方向车辆从停车线起步到到达路口交叉区域的行驶时间;通过第二获取单元获取路口各方向红灯开启后已放行车辆全部通过路口的排空时间;控制单元根据第一获取单元获取的行驶时间和第二获取单元获取的交叉方向车辆排空时间控制信号灯。
相比目前的交叉路口设置,本发明一方面通过把停车线后移一定距离,给起步车辆提供一段加速距离,以便车辆能以一定的速度快速通过路口,另一方面,根据车辆通过加速距离的时间和车辆在红灯之后的排空时间,在交叉方向的放行车辆排空之前,提前开启该方向的绿灯,以消除由于停车线后移而延长的路口通行距离,通过信号灯切换时间与路口空间距离的配合控制,提高了车辆通过路口的速度,进而缩短了路口通过时间,提高路口的通行效率,方法简单,成本低,容易实施。
附图说明
图1是现行交叉路口停车线设置示意图。
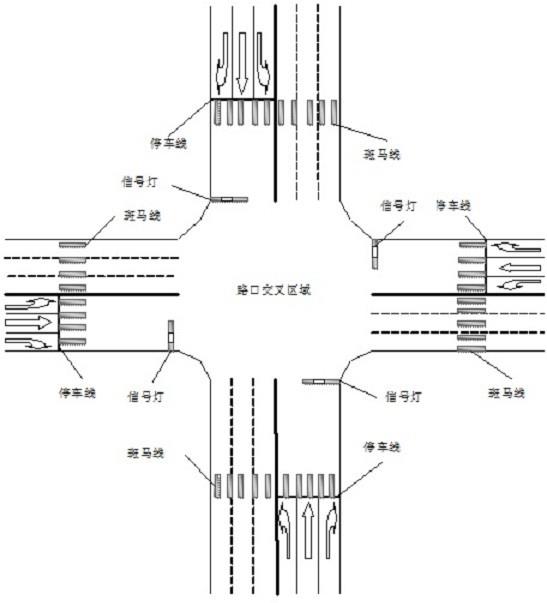
图2是本发明交叉路口停车线设置示意图。
图3是本发明交叉路口快速通行控制方法流程示意图。
图4是本发明路口单车通行节省时间与停车距离关系图。
图5是本发明路口整体通行节省时间与停车距离关系图。
图6是本发明控制系统结构框图示意图。
具体实施方式
在图1所示的现行交叉路口停车线设置示意图中,在路口交叉区域四周设置行人斑马线,停车线设置在车道与行人斑马线的交界处,信号灯设置在交叉区域对面的车道上空。当绿灯开启,待行车辆从停车线起步,逐步加速通过路口斑马线和交叉区域。为了便于说明,假设图1中的路口为南北、东西方向交叉,路口交叉区域包括斑马线,其边长为25米*25米的正方形。
图2所示的是本发明交叉路口停车线设置示意图,与图1不同的是,本发明把停车线进行了后移,在路口车道上远离交叉区域一定距离处设置停车线,以便为停车线附近起步的车辆提供一段加速距离,使其在到达路口交叉区域时,获得一定的行驶速度,进而能够快速通过路口。在以下实施例中,为了便于与图1进行对比说明,假设图2中的路口为南北、东西方向交叉,路口交叉区域为25米*25米的正方形。
所述图2中的停车线离交叉区域的加速距离可以根据车辆的加速度、和交叉路口的通行速度进行设置。比如,假设车辆的加速度为a=2.0米/平方秒,如果设定路口的通行速度为v=10米/秒,那么车速可以在t=5秒内由0加速到10米/秒,所需的加速距离s=25米,即把停车线向后移动25米。根据加速度、速度、位移之间的物理关系可知,在车辆加速一定时,设定的路口通行速度越高,所需的加速距离也越长。
一个显而易见的问题,停车线后移,在提高车辆通过路口的速度同时,加长了路口的通行距离,即由图1中的25米延长为图2中的50米,造成路口通行时间的延长。为了抵消因停车线后移造成的时间延迟,可以在路口交叉方向的放行车辆排空之前提前开启该方向绿灯。为此,需要获取路口各方向车辆从停车线起步到到达路口交叉区域边界的行驶时间和红灯开启后已放行车辆全部驶离路口交叉区域边界的排空时间,以控制绿灯提前打开,控制方法如图3所示。
(1)在路口车道上远离交叉区域一定距离处设置停车线,为该车道上的车辆快速通过路口提供加速距离;
(2)获取车辆从停车线起步到到达交叉区域的行驶时间;
(3)获取红灯开启后已放行车辆全部通过路口的排空时间;
(4)根据所述行驶时间,在路口交叉方向的已放行车辆排空之前提前开启另一方向绿灯,以抵消因停车线后移延迟的路口通过时间。
其中,步骤(2)与步骤(3)不分先后。
所述获取车辆从停车线起步到到达路口交叉区域的行驶时间包括通过检测装置检测的车辆行驶信息进行获取。所述检测装置包括路端设备或车载设备,所述行驶信息包括速度、位置、时间等。比如路侧智能摄像头,通过视频分析检测车辆从停车线起步到到达路口交叉区域的行驶时间、或通过车载终端实时上传检测的车辆速度、时间、位置信息判断车辆从停车线起步到到达路口交叉区域的行驶时间。
所述获取车辆从停车线起步到到达路口交叉区域的行驶时间也可以包括通过统计车辆历史行驶时间信息获取。根据车辆从停车线起步到到达路口交叉区域的行驶时间历史信息,通过统计方法获取具有代表性的行驶时间值。
所述获取车辆从停车线起步到到达路口交叉区域的行驶时间还可以包括通过车辆加速度和停车线距离计算车辆从停车线起步到到达路口交叉区域所需时间。在车辆加速度和加速距离一定时,可以通过物理公式计算通过设定距离的行驶时间。比如在图2中,按上述设定的参数,车辆从停车线起步,以2米/平方秒加速行驶25米到达路口交叉区域,计算所需的加速行驶时间为5秒。
与上述获取车辆的行驶时间类似,获取红灯后已放行车辆的排空时间也可以通过检测、统计、计算等方法。
所述获取红灯开启已放行车辆全部通过路口交叉区域的排空时间包括通过检测装置检测车辆通过路口的行驶信息获取车辆通过路口所需时间。所述检测装置包括路端设备或车载设备,所述行驶信息包括速度、位置、时间等。比如路侧智能摄像头,通过视频分析检测红灯开启后,已放行的车辆全部通过路口交叉区域的排空时间,或根据车载终端实时上传检测的车辆速度、时间、位置信息,判断已放行的车辆全部通过路口交叉区域的排空时间。
所述获取红灯开启已放行车辆全部通过路口交叉区域的排空时间也可以包括通过统计车辆历史排空时间信息获取。根据红灯开启后,已放行车辆通过路口交叉区域的排空时间历史信息,通过统计方法获取具有代表性的排空时间值。
所述获取红灯开启已放行车辆全部通过路口交叉区域的排空时间还可以包括通过车速度和路口距离计算车辆从停车线到通过路口交叉区域所需时间。在车速和行驶距离一定时,可以通过物理公式计算通过路口的排空时间。比如在图2中,在上述设定的参数下,车辆以10米/秒车速从停车线通过,行驶25米的加速距离到达交叉区域,然后再行驶25米的交叉区域通过路口,路口通过距离为50米,计算所需的排空时间为5秒。
相对于现行交叉路口,本发明的关键问题是通过提前开启绿灯时间周期,以抵消因停车线后移造成的路口通过距离加长。控制提前开启绿灯的时间是基于交叉方向红灯的打开时间,结合该方向已放行车辆的排空时间,以及另一方向从停车线起步到交叉区域的行驶时间而定,以确保交叉方向的已放行车辆全部通过路口交叉区域后,另一方向的车辆正好到达路口交叉区域。如果绿灯开启时间过早,会造成不同方向的车辆在交叉区域相遇而阻塞路口,如果绿灯开启时间滞后,交叉方向车辆已全部通过路口交叉区域而排空后,另一方向的车辆还未到达交叉区域,造成另一方向车辆的通行延迟而浪费时间。
当交叉方向红灯开启后,如果已放行车辆以限定车速从停车线通过交叉区域的排空时间等于另一方向的车辆从停车线起步到达交叉区域的行驶时间,那么可以在交叉方向的红灯开启时,同时开启另一方向的绿灯。比如在上述实施例中,当交叉方向红灯开启时,已放行车辆从停车线以10米/秒车速行驶50米通过路口交叉区域的排空时间是5秒钟;另一方向车辆从停车线起步加速行驶25米到达交叉区域的行驶时间也是5秒钟,因此,当一个方向红灯开启时,可以同时开启另一方向的绿灯时间周期。
如果交叉方向红灯后已放行车辆以限定车速从停车线通过交叉区域的排空时间小于另一方向的车辆从停车线起步到达交叉区域的行驶时间,则需要在交叉方向的红灯开启前,提前一定时间打开另一方向绿灯,同时放行两方向车辆通行,以避免造成车辆通行延迟而浪费时间,提前的时间就是行驶时间减去排空时间的时间差。
如果交叉方向红灯后已放行车辆以限定车速从停车线通过交叉区域的排空时间大于另一方向的车辆从停车线起步到达交叉区域的行驶时间,则需要在交叉方向的红灯开启后延迟一定时间,再放行另一方向的车辆通行,以避免两个方向的车辆在交叉区域阻塞,延迟的时间就是排空时间减去行驶时间的时间差。
值得注意的是,停车线距离路口交叉区域通常在几十米范围,车辆从停车线起步到到达交叉区域边界的加速时间只有几秒钟,即使车辆提速快慢有所不同,车辆从停车线起步到到达交叉区域的行驶时间变化通常比较小,可以选取一个固定的行驶时间值。同样,路口交叉区域宽度也只有几十米,车辆以限定速度从停车线通过交叉区域的时间也只有几秒钟,即使车辆在路口的通行速度有所波动,车辆从停车线通过交叉区域的排空时间变化也通常比较小,可以选取一个固定的排空时间值。
可见,在图1与图2所示的两种交叉路口中,由于两个路口中的停车线位置不同,造成车辆起步位置不同,信号灯时间周期的切换控制也不同,但是路口交叉区域的边界线位置是一样的,通过离开交叉区域的边界线判断车辆通过路口的排空时间是一致的。因此,可以基于一个方向红灯后已放行车辆全部通过路口交叉区域的排空时间,计算另一方向车辆通过路口的时间,以对比车辆在两种路口的通过时间。为了简单起见,不考虑车辆启动延迟时间。
在图1和图2中,无论车辆与停车线相距多远,都要首先以2米/平方秒加速度持续加速行驶5秒,以达到10米/秒的限定车速,然后以限定车速通过剩余路段。
图2中由于停车线后移25米,造成车辆通过路口的距离增加25米,如果图1中车辆需要通过的路口宽度是25米(包括斑马线),那么图2中车辆需要通过的路口宽度则是50米。如果车辆以10米/秒的限速通过路口,图1中的路口通过时间是2.5秒钟,图2中的路口通过时间则需5秒钟。
在图1中,停车线处于路口交叉区域边界,为了避免路口交叉区域出现两个方向车辆的相遇而阻塞,一个方向的绿灯开启时间是在交叉方向的车辆排空之后。而在图2中,由于停车线远离路口交叉区域一定距离,一个方向的车辆可以在路口交叉方向的车辆排空之前从停车线起步,行驶5秒到达交叉区域,即一个方向的绿灯可以在路口交叉方向已放行车辆排空之前提前5秒钟开启。也就是说,图2中的车辆比图1中的车辆早起步5秒钟。虽然提前5秒钟的目的是消除停车线后移造成的距离增加,但是,通过距离与时间的配合,提高了车辆通过路口交叉区域的车速,使得图2中的车辆在交叉方向的车辆排空之后,通过路口时间比图1中的车辆缩短了2.5秒钟。
下面通过图1与图2所示路口通行时间进行对比,具体分析对比距离停车线不同位置起步的车辆在交叉方向车辆排空之后通过路口时间的变化情况。
首先,对比从停车线起步车辆通过路口的时间变化。在图1中,当车辆从停车线起步加速通过路口时,以2米/平方秒加速度持续加速行驶25米以通过交叉区域,即在交叉方向车辆排空之后,另一方向于停车线起步的车辆需要行驶5秒以通过交叉路口。
在图2中,当车辆从停车线起步加速通过路口时,以2米/平方秒加速度持续加速行驶25米到达交叉区域边界,加速行驶时间为5秒,达到10米/秒的限速,然后以10米/秒的速度通过25米宽的交叉区域需要2.5秒,共需要7.5秒可以通过交叉路口。由于在交叉方向车辆排空之前,提前5秒开启绿灯,该方向车辆在交叉方向车辆排空之后2.5秒通过了路口,与图1的5秒钟通过时间相比,缩短了2.5秒,即通行效率提高了50%。
对于距离停车线25米处起步车辆,在图1中,车辆首先起步加速5秒行驶25米,以达到10米/秒的限速,然后以10米/秒速度通过25米宽的交叉区域,即在交叉方向车辆排空之后,另一方向距离停车线25米的车辆通过路口的时间为7.5秒。在图2中,由于停车线后移25米,路口实际行驶距离是50米。车辆首先起步加速5秒行驶25米,以达到10米/秒的限速,然后以10米/秒速度通过50米宽的交叉区域,通过路口的持续时间为10.0秒,减去绿灯提前开启时间5秒,另一方向距离停车线25米的车辆在交叉方向车辆排空之后实际通过路口的时间为5.0秒,与图1的7.5秒通过时间相比,缩短了2.5秒,即通行效率提高了30%。
以此类推,在图1中,距离停车线分别为50米、75米、100米、150米和200米起步的车辆,在交叉方向车辆排空之后实际通过路口的时间分别为10.0秒、12.5秒、15.0秒、20.0秒、25.0秒。在图2中,距离停车线分别为50米、75米、100米、150米和200米起步的车辆,在交叉方向车辆排空之后实际通过路口的时间分别为7.50秒、10.0秒、12.5秒、17.5秒、22.5秒,通行效率分别提高了25%、20%、16.7%、12.5%、10%。
可以看出,与停车线相距不同距离的车辆,路口通行效率提高的程度也不相同,越靠近停车线的车辆,通行效率提高的越多,随着逐渐远离停车线,通行效率随之下降,即路口通行效率的提高程度与车辆与停车线的距离成反曲线关系,如图4所示的单车通行效率提高曲线。
如果在一个信号灯周期内通过路口的车辆排队长度为距离停车线100远的范围,那么与现行路口相比,该信号灯周期内整体通行效率提高约25%,如果在一个信号灯周期内通过路口的车辆排队长度为距离停车线150米远的范围,该信号灯周期内整体通行效率提高约20%,如果在一个信号灯周期内通过路口的车辆排队长度为距停车线200米远时,该信号灯周期内整体通行效率提高约为16.7%,如图5所示的整体通行效率提高曲线。
此外,如果提高车辆在路口的通行速度,通行效率的提高程度也随之增加,显然,加速距离也需要随之增加。
进一步,在车道进入交叉区域的入口处设置信号灯,如图2所示,使停车线与信号灯之间处于适当视距范围。
进一步,在所述停车线前设置行人斑马线,如图2所示。
进一步,在交叉方向的斑马线之间设置护栏,通过护栏形成对交叉路口的封闭。通过封闭可以提高交叉路口的通行车速,最大程度提高路口通行效率。
基于同样的构思,本发明还提出了一种交叉路口快速通行控制系统,包括停车线、第一获取单元、第二获取单元、控制单元、信号灯;其中,把停车线设置在路口车道上远离交叉区域一定距离处,为该车道上的车辆快速通过路口提供加速距离;通过第一获取单元获取路口各方向车辆从停车线起步到到达路口交叉区域的行驶时间;通过第二获取单元获取路口各方向红灯开启后已放行车辆全部通过路口的排空时间;控制单元根据第一获取单元获取的行驶时间和第二获取单元获取的交叉方向车辆排空时间控制信号灯,系统结构框图如图6所示。
所述第一获取单元包括检测模块。所述检测模块包括路侧检测装置,比如路侧智能摄像头,通过视频分析检测车辆从停车线起步到到达路口交叉区域的行驶时间。
所述检测模块包括车载终端,通过车载终端实时上传检测的车辆速度、时间、位置等行驶信息判断车辆从停车线起步到到达路口交叉区域的行驶时间。
所述第一获取单元包括统计模块,比如计算机,通过计算机统计车辆历史行驶时间信息,根据车辆从停车线起步到到达路口交叉区域的行驶时间历史信息,通过计算机的统计获取具有代表性的行驶时间值。
所述第一获取单元包括输入模块。比如,在车辆加速度和加速距离一定时,可以通过物理公式计算车辆从停车线起步到到达路口交叉区域设定距离的行驶时间,通过输入模块输入控制系统。
所述第二获取单元包括检测模块。所述检测模块包括路侧检测装置,比如路侧智能摄像头,通过视频分析检测红灯开启后,已放行的车辆全部通过路口交叉区域的行驶时间。
所述检测模块包括车载终端,通过车载终端实时上传检测的车辆速度、时间、位置等行驶信息,判断红灯开启后,已放行的车辆全部通过路口交叉区域的行驶时间。
所述第二获取单元包括统计模块,比如计算机,通过计算机统计车辆历史行驶时间信息,根据红灯后的车辆从停车线经过到驶离路口交叉区域的排空时间历史信息,通过计算机的统计获取具有代表性的排空时间值。
所述第二获取单元包括输入模块,比如,在车速和行驶距离一定时,可以通过物理公式计算红灯后从停车线经过的车辆到离开路口交叉区域的排空时间,通过输入模块输入控制系统。
所述控制单元包括控制器,根据第一获取单元获取的行驶时间和第二获取单元获取的排空时间,控制信号灯
所述控制单元控制信号灯包括如果过交叉方向的排空时间等于另一方向的行驶时间,在交叉方向的红灯开启时,同时开启另一方向的绿灯。
所述控制单元控制信号灯包括如果交叉方向的排空时间小于另一方向的行驶时间,根据行驶时间与排空时间的差值,在交叉方向的红灯开启前,提前一定时间打开另一方向绿灯。
所述控制单元控制信号灯包括如果交叉方向的排空时间大于另一方向的行驶时间,根据排空时间与行驶时间的差值,在交叉方向的红灯开启后延迟一定时间开启另一方向的绿灯。
本发明通过停车线位置和绿灯开启时间的结合控制,提高车辆通过路口的车速,缩短了通过路口的时间,进而提高交叉路口的通行效率,简单可靠,成本低廉。
- 还没有人留言评论。精彩留言会获得点赞!