刀闸位置监测系统的制作方法
[0001]
本发明实施例涉及刀闸位置监测技术,尤其涉及一种刀闸位置监测系统。
背景技术:
[0002]
刀闸在变电设备中有着重要的应用,如变电站气体绝缘组合电气设备,即gis刀闸或hgis刀闸,因具有结构紧凑、占地面积小、可靠性高、维护工作量小、安装方便、安全性强等特点,在变电设备中应用较为广泛。
[0003]
刀闸中动触头与静触头的相对位置确认极为重要,现有的静触头与动触头的相对位置确认一般采用传动连杆等方式,刀闸的传动连杆在传动过程中将与刀闸、地刀同步发生角度与位置变化,因此根据刀闸与连杆两者的位置存在一一对应的关系,运维人员可以通过连杆的位置,间接地确定刀闸的位置;或者在连杆上配置辅助开关,使得反应刀闸位置的机械信号转换为电信号,发送给现场汇控箱与测控屏柜,将信号远程传送给后台监控机实现实时查看。
[0004]
然而,采用连杆的方式无法准确可靠地得到刀闸中动触头与静触头的相对位置信息,当连杆损坏时将极大地影响判断的准确性,监测的可靠性和准确性均较低,不利于刀闸的应用。
技术实现要素:
[0005]
本发明提供一种刀闸位置监测系统,以准确可靠地监测刀闸中动触头与静触头的相对位置。
[0006]
本发明实施例提供了一种刀闸位置监测系统,所述刀闸位置监测系统包括:刀闸,所述刀闸包括动触头和静触头;多个位置刻度,所述位置刻度设置于所述动触头的表面;图像采集单元,所述图像采集单元用于采集所述静触头与所述位置刻度的图像信息;处理单元,所述处理单元与所述图像采集单元电连接,用于根据所述图像采集单元采集的图像信息确定所述动触头与所述静触头的相对位置信息。
[0007]
可选地,所述静触头上设置有指示标志,所述图像信息包括所述指示标志的图像;所述处理单元用于根据所述图像信息确定指示标志与所述位置刻度的相对位置,以确定所述动触头与所述静触头的相对位置信息。
[0008]
可选地,所述处理单元根据所述图像信息确定指示标志与所述位置刻度的相对位置,以确定所述动触头与所述静触头的相对位置信息包括:沿所述动触头的移动方向,若所述指示标志与所述多个位置刻度中的预设位置刻度之间的距离小于第一预设距离,则确定所述动触头与所述静触头为合闸状态;若所述指示标志与所述多个位置刻度中的预设位置刻度之间的距离大于第二预设距离,则确定所述动触头与所述静触头为分闸状态
[0009]
可选地,所述刀闸位置监测系统还包括:壳体;所述刀闸设置于所述壳体的内部;所述壳体包括开口,所述图像采集单元设置于所述开口处。
[0010]
可选地,所述刀闸位置监测系统还包括:透明腔体,所述透明腔体能够封堵所述开
口以形成所述壳体内部的封闭空间;所述图像采集单元设置于所述封闭空间外部。
[0011]
可选地,所述图像采集单元集成有照明单元。
[0012]
可选地,所述刀闸位置监测系统还包括:电动控制模块,所述电动控制模块用于驱动所述动触头与所述静触头合闸或分闸;供电模块,所述供电模块与所述图像采集模块及所述电动控制模块电连接,用于同时向所述图像采集单元及所述电动控制模块供电。
[0013]
可选地,所述刀闸位置监测系统还包括:汇控箱;所述汇控箱与所述处理单元电连接,用于接收所述处理单元发送的所述相对位置信息。
[0014]
可选地,所述刀闸位置监测系统还包括:第一无线通信单元和后台监测模块;所述第一无线通信单元与所述处理单元电连接,所述第一无线通信单元与所述后台监测模块通信连接,用于将所述处理单元确定的所述相对位置信息及所述图像信息发送至所述后台监测模块。
[0015]
可选地,所述后台监测模块包括:第二无线通信单元,所述第二无线通信单元与所述第一无线通信单元通信连接;测控屏,所述测控屏与所述第二无线通信单元电连接,用于接收所述相对位置信息;监控后台机,所述监控后台机与所述测控屏及所述第二无线通信单元电连接,用于接收所述测控屏发送的所述相对位置信息及所述第二无线通信单元发送的所述图像信息。
[0016]
本发明的技术方案,采用的刀闸位置监测系统包括刀闸,刀闸包括动触头和静触头;多个位置刻度,位置刻度设置于动触头的表面;图像采集单元,图像采集单元用于采集静触头与位置刻度的图像信息;处理单元,处理单元与图像采集单元电连接,用于根据图像采集单元采集的图像信息确定动触头与静触头的相对位置信息。图像采集单元采集包括静触头的图像与位置刻度的图像在内的图像信息,处理单元可根据该图像信息判断出静触头与位置刻度的相对位置,进而判断出动触头与静触头处于合闸状态还是分闸状态,且本实施例中采用位置刻度的方式,处理单元容易识别出位置刻度与静触头之间的相对位置,从而能够高效准确地识别出动触头与静触头的相对位置,便于对刀闸进行维护,安全性较高。
附图说明
[0017]
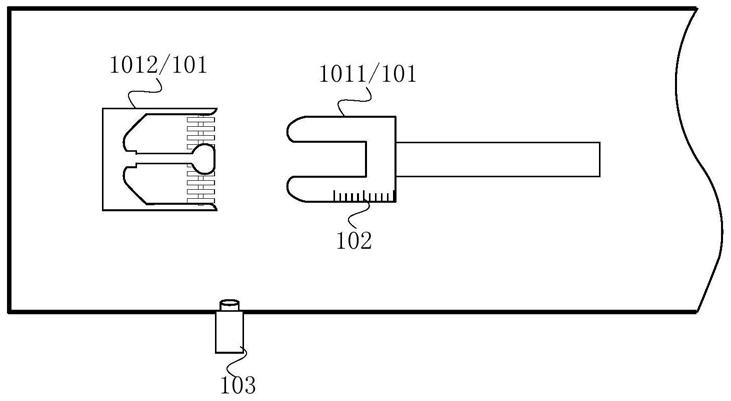
图1为本发明实施例提供的一种刀闸位置监测系统的结构示意图;
[0018]
图2为本发明实施例提供的一种刀闸位置监测系统中静触头与动触头合闸的结构示意图;
[0019]
图3为本发明实施例提供的又一种刀闸位置监测系统的结构示意图;
[0020]
图4为本发明实施例提供的又一种刀闸位置监测系统的结构示意图;
[0021]
图5为本发明实施例提供的一种刀闸位置监测系统的电路结构示意图。
具体实施方式
[0022]
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0023]
图1为本发明实施例提供的一种刀闸位置监测系统的结构示意图,参考图1,刀闸位置监测系统包括:刀闸101,刀闸101包括动触头1011和静触头1012;多个位置刻度102,位
置刻度102设置于动触头1011的表面;图像采集单元103用于采集静触头1012与位置刻度102的图像信息;处理单元,处理单元与图像采集单元103电连接,用于根据图像采集单元103采集的图像信息确定动触头1011与静触头1012的相对位置信息。
[0024]
具体地,刀闸例如可以是gis刀闸或者地刀刀闸等,静触头1012可固定,动触头1011可相对于静触头1012移动以实现合闸或分闸;位置刻度102例如可以是刻在动触头1011上的永久刻度槽,也可以是贴附在动触头1011上的标志类刻度;本实施例中,可设置位置刻度102与静触头1012的颜色反差较大,如静触头一般为银色,则可设置位置刻度为蓝色,从而降低处理单元进行图像识别的难度。图像采集单元103例如可以是摄像头,能够拍摄图像信息,拍摄的图像信息中包括静触头1012以及位置刻度102,图2为本发明实施例提供的一种刀闸位置监测系统中静触头与动触头合闸的结构示意图,图1中所示的刀闸位置监测系统中动触头与静触头处于分闸状态,结合图1和图2,当动触头1011与静触头1012分闸时,位置刻度102与静触头1012之间的距离较远,图像采集单元103采集到图像信息后发送给处理单元,处理单元可利用图像算法判断出位置刻度102与静触头1012之间距离,当距离较大时,可判断出动触头1011与静触头1012之间处于分闸状态;而当动触头1011与静触头1012处于合闸状态时,静触头1012与位置刻度102之间的距离较近,处理单元可利用图像算法判断出位置刻度102与静触头1012之间的距离较小,从而判断出动触头1011与静触头1012之间处于合闸状态。且在本实施例中,通过采用位置刻度的方式,处理单元容易识别出位置刻度与静触头之间的相对位置,从而能够高效准确地识别出动触头与静触头的相对位置,便于对刀闸进行维护,安全性较高。需要说明的是,本实施例中位置刻度102与静触头1012之间的距离,可具体理解为静触头1012上的某一位置(如静触头1012的端部)与任意一个位置刻度102之间的距离。
[0025]
本实施例的技术方案,采用的刀闸位置监测系统包括刀闸,刀闸包括动触头和静触头;多个位置刻度,位置刻度设置于动触头的表面;图像采集单元,图像采集单元用于采集静触头与位置刻度的图像信息;处理单元,处理单元与图像采集单元电连接,用于根据图像采集单元采集的图像信息确定动触头与静触头的相对位置信息。图像采集单元采集包括静触头的图像与位置刻度的图像在内的图像信息,处理单元可根据该图像信息判断出静触头与位置刻度的相对位置,进而判断出动触头与静触头处于合闸状态还是分闸状态,且本实施例中采用位置刻度的方式,处理单元容易识别出位置刻度与静触头之间的相对位置,从而能够高效准确地识别出动触头与静触头的相对位置,便于对刀闸进行维护,安全性较高。
[0026]
可选地,图3为本发明实施例提供的又一种刀闸位置监测系统的结构示意图,参考图3,静触头1012上设置有指示标志104,图像信息包括指示标志的图像;处理单元用于根据图像信息确定指示标志104与位置刻度102的相对位置,以确定动触头与静触头的相对位置信息。
[0027]
具体地,在静触头1012上设置指示标志104,指示标志104例如可以是刻在静触头1012上的永久刻度槽,也可以是贴附在静触头1011上的标志类刻度,处理单元更加容易识别出指示标志104与位置刻度102之间的相对位置,进而进一步降低图像识别的难度。优选地,可设置指示标志104的颜色与静触头的颜色、动触头的颜色以及位置刻度的颜色均不同,从而更加有利于处理单元判断位置刻度与指示标志之间的相对位置。
[0028]
可选地,处理单元根据图像信息确定指示标志与位置刻度的相对位置,以确定动触头与静触头的相对位置信息包括:沿动触头的移动方向,若指示标志与多个位置刻度中的预设刻度之间的距离小于第一预设距离,则确定动触头与静触头为合闸状态;若指示标志与多个位置刻度中的预设位置刻度之间的距离大于第二预设距离,则确定动触头与静触头为分闸状态。
[0029]
具体地,在本实施例中,预设位置刻度可为多个位置刻度中的任意一个位置刻度,动触头1011上设置有多个位置刻度102,当在动触头1011的移动方向上,指示标志104与预设位置刻度的距离小于第一预设距离时,表明动触头1011与静触头1012为合闸状态,且合闸状态良好(如接触电阻小于预设值);而当指示标志104与预设位置刻度的距离大于等于第一预设距离且小于等于第二预设距离时,若动触头与静触头仍接触,则为不良接触状态,即接触电阻较大,容易发热损坏,而若动触头与静触头不接触,此时因动触头与静触头之间距离较小,仍有发生接触的可能,也即处于不良的分闸状态;当指示标志104与预设位置刻度之间的距离大于第二预设距离时,动触头1011与静触头1012之间发生非正常接触的可能性较小,即处于可靠的分闸状态。
[0030]
可选地,继续参考图3,刀闸位置监测系统还包括壳体105,刀闸101设置于壳体105内部;壳体105包括开口,图像采集单元103设置于开口处。
[0031]
具体地,壳体105可用于保护刀闸101,避免刀闸101被环境中的水氧等腐蚀,从而提高刀闸101的使用寿命。图像采集单元103可设置于开口处,图像采集单元103距离刀闸101位置较远,从而保证图像采集单元103能够采集到指示标志104与位置刻度102的图像信息;同时将图像采集单元103设置于开口处,不用将壳体105打开便可对图像采集单元103进行维护,降低维护以及更换等的难度。
[0032]
可选地,图4为本发明实施例提供的又一种刀闸位置监测系统的结构示意图,参考图4,刀闸位置监测系统还包括透明腔体106,透明腔体106能够封堵开口以形成壳体105内部的封闭空间;图像采集单元103设置于封闭空间外部。
[0033]
具体地,刀闸101可为gis刀闸,其需要处于密闭的空间中,如封闭在金属接地的外壳中,并在其内部填充sf6(六氟化硫)气体,六氟化硫作为绝缘和灭弧介质。在本实施例中,可设置透明腔体106,从而形成密闭空间,避免封闭空间内的气体泄漏;透明腔体106例如可以是设置于壳体105表面的凹槽,便于图像采集单元103与壳体105或者透明腔体106进行固定;同时,图像采集单元103设置于封闭空间外部且对应开口的位置,如可将图像采集单元103的取景部分固定于透明腔体106中,即图像采集单元相对于壳体为“外置式”,当图像采集单元损坏时,可很方便的对图像采集单元进行维护或更换。
[0034]
可选地,图像采集单元103集成有照明单元。壳体105可能为不透光的壳体,此时可设置图像采集单元103为集成有照明单元的图像采集单元,从而保证图像采集单元103能够采集到清晰的图像信息,使得处理单元能够准确地识别出指示标志与位置刻度之间的相对位置;照明单元例如可以是led等。在其它一些实施方式中,图像采集单元103也可为红外摄像头。
[0035]
可选地,刀闸位置监测系统还包括:电动控制模块,电动控制模块用于驱动动触头与静触头合闸或分闸;供电模块,供电模块与图像采集模块及电动控制模块电连接,用于同时向图像采集单元及电动控制模块供电。
[0036]
具体地,电动控制模块例如可以包括电动机以及传动轴等,供电模块向电动机供电,电动机带动传动轴移动,进而使得动触头与静触头合闸或分闸。在本实施例中,电动控制模块和图像采集单元均可设置为上电即启动工作,即当供电模块启动供电时,电动控制模块启动控制动触头移动的工作,同时图像采集单元启动采集图像的工作,也即只有在刀闸动作时图像采集单元才工作,从而降低图像采集单元的功耗。
[0037]
可选地,图5为本发明实施例提供的一种刀闸位置监测系统的电路结构示意图,参考图5,刀闸位置监测系统还包括汇控箱201,汇控箱201与处理单元107电连接,用于接收处理单元107发送的相对位置信息。
[0038]
具体地,处理单元107可将得到的相对位置信息发送给汇控箱201(汇控柜),汇控箱201设置于现场,以方便在现场的操作人员获取刀闸的状态信息,从而对刀闸进行操作,如进行维护等。
[0039]
可选地,继续参考图5,刀闸位置监测系统还包括第一无线通信模块202和后台监测模块301,第一无线通信单元202与处理单元107电连接,第一无线通信单元202与后台监测模块301通信连接,用于将处理单元确定的相对位置信息及图像信息发送至后台监测模块301。
[0040]
具体地,第一无线通信单元202可将处理单元确定的相对位置信息发送至后台监测模块301,后台监测模块301设置于后台,操作人员可在后台获知刀闸中静触头与动触头的相对位置信息,而不必去现场进行确定,从而极大的节约成本。
[0041]
示例性地,后台监测模块301包括:第二无线通信单元3011,第二无线通信单元3011与第一无线通信单元202通信连接;测控屏3012,测控屏3012与第二无线通信单元3011电连接,用于接收相对位置信息;监控后台机3013,监控后台机3013与测控屏3012及第二无线通信单元3011电连接,用于接收测控屏3012发送的相对位置信息及第二无线通信单元3011发送的图像信息。
[0042]
具体地,第一无线通信单元202例如可以是无线发射器,第二无线通信单元3011例如可以是无线接收器,第一无线通信单元202与第二无线通信单元3011之间可进行5g通信;测控屏3012可实时显示动触头与静触头的刀闸状态,如确定刀闸为关闸状态或是开闸状态,并将刀闸状态传送至监控后台机,监控后台机根据刀闸状态进行相应的操作,如将刀闸状态进行存储等;同时监控后台机还可实时显示刀闸的图像信息,从而方便操作人员判断相对位置信息是否存在错误,进一步提高判断的准确性。
[0043]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1