短路故障检测装置和电力变换装置的制作方法
1.本公开涉及一种短路故障检测装置和电力变换装置。
背景技术:
2.在驱动马达等负载的电力变换装置中,有时电力变换装置中所包括的半导体开关元件中会流通过大的电流。当这种过大的电流长时间地流通时,半导体开关元件有可能会损坏。因此,电力变换装置具有短路故障检测装置,该短路故障检测装置用于探测流过半导体开关元件的过大电流并使电力变换装置停止。
3.在这种短路故障检测装置中,为了检测流过半导体开关元件的电流而利用分流电阻、ct(current transformer;变流器)、或罗哥夫斯基线圈等。在这些部件中,罗哥夫斯基线圈不具有芯。因此,具有以下优点:能够使短路故障检测装置小型化,另外,能够测定大电流。
4.专利文献1所公开的技术涉及一种经由多个臂向负载供给电力的电力变换装置。电力变换装置具备分别包括了半导体开关元件的多个臂、多个罗哥夫斯基线圈以及多个检测电路。一个检测电路和一个罗哥夫斯基线圈与一个臂对应。检测电路基于对应的罗哥夫斯基线圈的输出电压,来检测对应的臂等的短路故障。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2019-216540号公报
技术实现要素:
8.发明要解决的问题
9.在上述的专利文献1所公开的技术中,分别对多个臂中的每一个臂设置了罗哥夫斯基线圈和检测电路,因此存在增加成本且导致电力变换装置的大型化的问题。另外,存在具备sic等的高速的半导体开关元件的电力变换装置。在这种电力变换装置中,负载短路故障时的短路电流的时间梯度di/dt的数量级为μs程度。与此相对地,臂短路故障时的短路电流的时间梯度di/dt的数量级为ns程度。在这两种情况下,最适合负载短路和臂短路故障的探测的罗哥夫斯基线圈的匝数大不相同。因此,需要兼顾负载短路故障和臂短路故障各自的探测的设计,这会存在导致罗哥夫斯基线圈的大型化、以及检测电路的大型化和复杂化的问题。
10.本公开是鉴于以上所说明的问题而完成的,目的在于提供一种避免电力变换装置的大型化和复杂化并检测电力变换装置中的短路故障的技术方案。
11.用于解决问题的方案
12.一个方式中的短路故障检测装置是包括在电力变换装置中的短路故障检测装置,所述电力变换装置经由包括第一半导体开关元件的第一臂和包括第二半导体开关元件的第二臂向负载供给电力,所述短路故障检测装置具有:罗哥夫斯基线圈;以及检测电路,其
基于从所述罗哥夫斯基线圈得到的检测信号,检测所述第一臂、所述第二臂以及所述负载中的任一者的短路故障,其中,在第一电流路和第二电流路双方插入有所述罗哥夫斯基线圈,所述第一电流路供流过所述第一臂且流过所述负载的第一电流通过,所述第二电流路供流过所述第二臂且流过所述负载的第二电流通过。
13.其他方式中的电力变换装置是向负载供给电力的电力变换装置,其具有:第一臂,其包括第一半导体开关元件;第二臂,其包括第二半导体开关元件;第一电流路,其供流过所述第一臂且流过所述负载的第一电流通过;第二电流路,其供流过所述第二臂且流过所述负载的第二电流通过;以及短路故障检测装置,其中,所述短路故障检测装置具备:罗哥夫斯基线圈,其被插入到所述第一电流路和所述第二电流路双方;检测电路,其基于从所述罗哥夫斯基线圈得到的检测信号,检测所述第一臂、所述第二臂以及所述负载中的任一者的短路故障。
14.发明的效果
15.根据以上的方式,针对两个臂设置一个罗哥夫斯基线圈和一个检测电路,因此能够避免电力变换装置的大型化和复杂化并检测电力变换装置中的短路故障。
附图说明
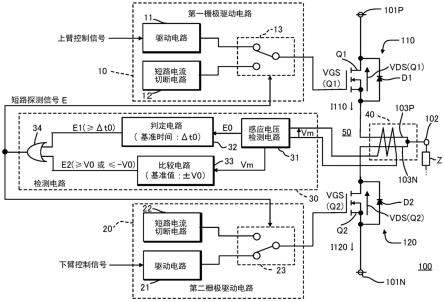
16.图1是具备作为一个实施方式的短路故障检测装置的电力变换装置的电路图。
17.图2是示出电力变换装置的动作例的电路图。
18.图3是示出在进行开关动作时未产生短路故障的情况(通常的开通)下的电力变换装置的动作的波形图。
19.图4是示出通常开通时的电力变换装置的动作的电路图。
20.图5是示出产生了臂短路故障时的电力变换装置的动作的波形图。
21.图6是示出产生了臂短路故障时的电力变换装置的动作的电路图。
22.图7是示出产生了负载短路故障时的电力变换装置的动作的波形图。
23.图8是示出产生了负载短路故障时的电力变换装置的动作的电路图。
24.图9是具备第一变形例中的短路故障检测装置的电力变换装置的电路图。
25.图10是第六变形例中的电力变换装置的侧视图。
26.图11是第六变形例中的罗哥夫斯基布线基板的俯视图。
27.图12是第七变形例中的电力变换装置的侧视图。
28.图13是第七变形例中的罗哥夫斯基布线基板的俯视图。
29.图14是第八变形例中的电力变换装置的俯视图。
30.图15是第八变形例中的电力变换装置的侧视图。
31.图16是第九变形例中的电力变换装置的侧视图。
具体实施方式
32.下面,一边参照附图一边说明实施方式。
33.图1是具备作为一个实施方式的短路故障检测装置50的电力变换装置100的电路图。电力变换装置100是相当于逆变器的一个相的装置,具有上臂110(第一臂)、下臂120(第二臂)、以及ac输出端子102。在此,上臂110与下臂120彼此串联连接,且配置在连接于电源
(未图示)的正极的高电位电源线101p与连接于同一电源的负极的低电位电源线101n之间。ac输出端子102对应于将两个臂共同连接的点(公共连接点)。在ac输出端子102连接有马达的绕阻等负载z。
34.电力变换装置100也可以具有多个相的上臂110和下臂120。在该情况下,也可以将1个相的上臂110与下臂120彼此串联连接而得到的多个对并联连接且配置于高电位电源线101p与低电位电源线101n之间。由此构成逆变器。
35.上臂110具有半导体开关元件q1(第一半导体开关)、以及与其反向并联连接的二极管d1。同样地,下臂120具有半导体开关元件q2(第二半导体开关)、以及与其反向并联连接的二极管d2。半导体开关元件q1和q2分别是mosfet(metal oxide semiconductor field effect transistor;金属氧化物半导体场效应晶体管)等晶体管。晶体管的例子包括以碳化硅、氮化镓、氧化镓以及金刚石中的至少一者为主材料的宽带隙半导体元件。
36.另外,电力变换装置100具有第一栅极驱动电路(上臂用)10和第二栅极驱动电路(下臂用)20。第一栅极驱动电路10基于从控制部(未图示)供给的上臂控制信号,来控制上臂110的半导体开关元件q1的接通/断开。第二栅极驱动电路20基于从同一控制部供给的下臂控制信号,来控制下臂120的半导体开关元件q2的接通/断开。电力变换装置100经由上臂110和下臂120来向负载z供给交流电力。
37.在图1的例子中,当在上臂110产生短路故障时,在下臂120变为接通时臂短路电流流过上臂110和下臂120双方。另外,当在下臂120产生短路故障时,在上臂110变为接通时臂短路电流流过上臂110和下臂120双方。另外,在电力变换装置100中,当负载z产生短路故障时,负载短路电流流过上臂110或下臂120。
38.当这种臂短路电流或负载短路电流长时间地流过上臂110或下臂120时,上臂110的半导体开关元件q1或下臂120的半导体开关元件q2有可能会损坏。因此,电力变换装置100具有短路故障检测装置50。短路故障检测装置50探测臂短路故障或负载短路故障的产生,使通过第一栅极驱动电路10进行的半导体开关元件q1的驱动以及通过第二栅极驱动电路20进行的半导体开关元件q2的驱动停止。
39.短路故障检测装置50具有针对上臂110(第一臂)和下臂120(第二臂)设置的罗哥夫斯基线圈40、以及检测电路30,该检测电路30基于从罗哥夫斯基线圈40得到的作为检测信号的感应电压vm来检测电力变换装置100中的短路故障。检测电路30也被称为短路判定电路。
40.在本实施方式中,罗哥夫斯基线圈40被插入到两个电流路双方。一个是供流过上臂110且流过负载z的第一电流通过的第一电流路103p。另一个是供流过下臂120且流过负载z的第二电流通过的第二电流路103n。具体来说,上臂110与下臂120彼此串联连接,并且配置于高电位电源线101p与低电位电源线101n之间。负载z与ac输出端子102连接。ac输出端子102对应于将上臂110与下臂120共同连接的点(公共连接点)。而且,第一电流路103p是上臂110与ac输出端子102之间的电流路,第二电流路103n是下臂120与ac输出端子102之间的电流路。而且,第一电流路103p的一部分和第二电流路103n的一部分处于罗哥夫斯基线圈40中。在罗哥夫斯基线圈40中,第一电流路103p中的从上臂110去向负载z的方向的电流与第二电流路103n中的从下臂120去向负载z的方向的电流是相同方向。
41.在这种结构中,当电流流过第一电流路103p或第二电流路103n时,产生以该电流
路为中心的圆形的磁场。而且,当流过该电流路的电流发生变化时,从罗哥夫斯基线圈40输出与该电流的时间梯度di/dt成比例的感应电压vm。该感应电压vm是从罗哥夫斯基线圈40得到的检测信号。
42.检测电路30包括感应电压检测电路31、判定电路32、比较电路33以及或门34。
43.感应电压检测电路31检测从罗哥夫斯基线圈40得到的感应电压(检测信号)vm,并输出到比较电路33。另外,感应电压检测电路31在感应电压vm为零电压的期间、具体来说在感应电压vm的绝对值小于微小的阈值(第一阈值)的期间,输出信号e0。
44.判定电路32是基于信号e0来检测臂短路故障的电路。更详细来说,在本实施方式中,有时在上臂110或下臂120中的一方产生短路故障、误接通之类的异常,从而产生臂短路故障。在该情况下,在另一个臂开通时,分别在第一电流路103p和第二电流路103n中长时间持续地流过相同大小的电流。但是,流过第一电流路103p的电流的极性与流过第二电流路103n的电流的极性相反。然后,从罗哥夫斯基线圈40得到的感应电压vm长时间持续为零电压。因此,在信号e0从上臂110或下臂120的开通开始起、持续了规定的基准时间δt0以上的情况下,判定电路32输出表示臂短路故障的产生的臂短路探测信号e1。
45.比较电路33(检测电路)是基于感应电压vm来检测负载短路故障的电路。更详细来说,在本实施方式中,当发生负载z的短路故障时,与通常时相比过大的电流流过第一电流路103p或第二电流路103n,并且该电流随着时间经过而增加,因此从罗哥夫斯基线圈40输出与通常相比过大的感应电压vm。因此,比较电路33在由感应电压检测电路31检测的感应电压vm的绝对值为基准值v0(第二阈值)以上的情况下,输出负载短路探测信号e2。
46.在输出了臂短路探测信号e1的情况下或输出了负载短路探测信号e2的情况下,或门34(检测电路)将短路探测信号e输出到第一栅极驱动电路10和第二栅极驱动电路20,来使半导体开关元件q1的驱动和半导体开关元件q2的驱动停止。
47.第一栅极驱动电路10包括驱动电路11、短路电流切断电路12以及切换电路13。向驱动电路11提供指示半导体开关元件q1的接通/断开的上臂控制信号。在提供了指示接通的上臂控制信号的情况下,驱动电路11输出使半导体开关元件q1接通的栅极-源极间电压vgs(q1)。另外,在提供了指示断开的上臂控制信号的情况下,驱动电路11输出使半导体开关元件q1断开的栅极-源极间电压vgs(q1)。短路电流切断电路12输出能够切断短路电流流过半导体开关元件q1的栅极-源极间电压vgs(q1)。在未输出短路探测信号e的情况下,切换电路13进行动作,以向半导体开关元件q1供给从驱动电路11输出的栅极-源极间电压vgs(q1)。另外,在输出了短路探测信号e的情况下,切换电路13进行动作,以向半导体开关元件q1供给从短路电流切断电路12输出的栅极-源极间电压vgs(q1)。
48.第二栅极驱动电路20与第一栅极驱动电路10同样,包括驱动电路21、短路电流切断电路22以及切换电路23。在未输出短路探测信号e的情况下,切换电路23进行动作,以向半导体开关元件q2供给从驱动电路21输出的栅极-源极间电压vgs(q2)。另外,在输出了短路探测信号e的情况下,切换电路23进行动作,以向半导体开关元件q1供给从短路电流切断电路22输出的栅极-源极间电压vgs(q2)。
49.接着,说明电力变换装置的动作。图2是示出电力变换装置100的一般性的动作例的电路图。在图2所示的例子中,通过以下的模式来向负载z供给电力。
50.(1)上臂接通模式
51.在下臂120断开的状态下,上臂110和未图示的其它相的下臂变为接通。
52.(2)上臂断开模式(回流模式)
53.在(1)之后,上臂110和未图示的其它相的下臂变为断开。
54.(3)下臂接通模式
55.下臂120和未图示的其它相的上臂变为接通。
56.(4)下臂断开模式(回流模式)
57.在(3)之后,下臂120和未图示的其它相的上臂变为断开。
58.在上臂接通模式中,从第一栅极驱动电路10输出使半导体开关元件q1接通的栅极-源极间电压vgs(q1)。此时,其它相的下臂的半导体开关元件(未图示)与半导体开关元件q1同时接通。通过半导体开关元件q1和其它相的下臂接通,上臂电流i110(漏极电流)从高电位电源线101p经由半导体开关元件q1流过,上臂电流i110经由罗哥夫斯基线圈40内的第一电流路103p流向负载z(实线箭头)。在上臂接通模式中,上臂电流i110随着时间经过而增加,上臂电流i110在第一电流路103p中从上臂110流向负载z。在本实施方式中,以如下方式配置罗哥夫斯基线圈40:在经由半导体开关元件q1流向负载z的电流增加时,罗哥夫斯基线圈40输出正的感应电压vm。
59.在此后的上臂断开模式中,从第一栅极驱动电路10输出使半导体开关元件q1断开的栅极-源极间电压vgs(q1),半导体开关元件q1变为断开。另外,其它相的下臂(未图示)也同时从接通变为断开。其结果,由负载z产生维持该时间点之前流向负载z的电流的电动势,下臂电流i120(回流电流)从低电位电源线101n经由二极管d2和罗哥夫斯基线圈40内的第二电流路103n流向负载z(虚线箭头)。在上臂断开模式中,下臂电流i120(回流电流)随着时间经过而减少,下臂电流i120在第二电流路103n中从下臂120流向负载z。即,在上臂断开模式中,通过罗哥夫斯基线圈40的电流的朝向与上臂接通模式相同,但电流的变化率变为负。由此,罗哥夫斯基线圈40输出负的感应电压vm。
60.在此后的下臂接通模式中,从第二栅极驱动电路20输出使半导体开关元件q2接通的栅极-源极间电压vgs(q2)。此时其它相的上臂的半导体开关元件(未图示)与半导体开关元件q2同时接通。通过半导体开关元件q2和其它相的上臂接通,下臂电流i120(漏极电流)从负载z经由罗哥夫斯基线圈40内的第二电流路103n和半导体开关元件q2流向低电位电源线101n(实线箭头)。在下臂接通模式中,下臂电流i120随着时间经过而增加,下臂电流i120在第二电流路103n中从负载z流向下臂120。即,在下臂接通模式中,通过罗哥夫斯基线圈40的电流的变化率是与上臂接通模式相同的极性,但通过罗哥夫斯基线圈40的电流的朝向是与上臂接通模式相反的方向。由此,罗哥夫斯基线圈40输出负的感应电压vm。
61.在此后的下臂断开模式中,从第二栅极驱动电路20输出使半导体开关元件q2断开的栅极-源极间电压vgs(q2),半导体开关元件q2变为断开。另外,其它相的上臂(未图示)也同时从接通变为断开。其结果,由负载z产生维持该时间点之前流向负载z的电流的电动势,上臂电流i110(回流电流)从负载z经由罗哥夫斯基线圈40内的第一电流路103p和二极管d1流向高电位电源线101p(虚线箭头)。在下臂断开模式中,上臂电流i110随着时间经过而减少,上臂电流i110在第一电流路103p中从负载z流向上臂110。即,在下臂断开模式中,通过罗哥夫斯基线圈40的电流的朝向是与上臂接通模式相反的方向,电流的变化率也为负。由此,罗哥夫斯基线圈40输出正的感应电压vm。
62.图3示出表示在进行上臂110的开关动作时未产生短路故障的情况(通常的开通)下的电力变换装置100的动作的波形。图4是示出在图3所示的期间a、b以及c内的电力变换装置100的动作的电路图。
63.在图3和图4所示的例子中,重复进行上臂110的开关动作。即,交替地重复图2所示的上臂接通模式和上臂断开模式(回流模式)。在图3和图4中示出了上臂断开模式和紧随其后的上臂接通模式。
64.在图3所示的例子中,期间a与期间b的边界是上臂110的开通的开始。在该开通开始前的期间a内,如图4所示,下臂电流i120(回流电流)从低电位电源线101n经由二极管d2和罗哥夫斯基线圈40内的第二电流路103n流向负载z。该模式是上臂断开模式,因此如图3所示,在期间a内从罗哥夫斯基线圈40输出负的感应电压vm。
65.此后,上臂110的开通开始。在期间b内,如图4所示,上臂电流i110(漏极电流)从高电位电源线101p经由半导体开关元件q1流通。在期间b内,随着时间经过,半导体开关元件q1的漏极-源极间电压vds(q1)减少,上臂电流i110(漏极电流)增加。在期间b的开始,在下臂120中,回流电流流过二极管d2。然后,在期间b内,上臂电流i110在通过了罗哥夫斯基线圈40内的第一电流路103p之后,通过第二电流路103n,流过下臂120,使二极管d2的回流电流减少。因此,在期间b内,负的下臂电流i120(回流电流)随着时间经过而达到0。然后,当流过二极管d2的下臂电流i120(回流电流)因上臂电流i110的增加而变为0时,此后的上臂电流i110是使正向偏置时二极管d2中积累的少数载流子消失的反向恢复电流。当流过该反向恢复电流时,此后下臂电流i120达到正的峰值,此后下臂电流i120开始减少。这样,二极管d2从接通变化为断开,下臂120的半导体开关元件q2的漏极-源极间电压vds(q2)增加。
66.在二极管d2从接通变为断开之前的期间内,通过了第一电流路103p的上臂电流i110通过第二电流路103n并流过下臂120。即,在第一电流路103p和第二电流路103n中分别流过相同变化率的电流。但是,流过第一电流路103p的电流的极性与流过第二电流路103n的电流的极性相反。在这种情况下,磁通在罗哥夫斯基线圈40内彼此抵消,因此从罗哥夫斯基线圈40输出零电压来作为感应电压vm。当二极管d2变为断开时,之后,通过了第一电流路103p的上臂电流i110不流过第二电流路103n而是流向负载z。该期间为图3所示的期间c。在期间c内,模式为上臂接通模式,因此从罗哥夫斯基线圈40输出正的感应电压vm。
67.在不存在臂短路故障的状态下,产生零电压作为感应电压vm的期间是由二极管d2的特性决定的短时间。在图3所示的例子中,产生零电压作为感应电压vm的时间比规定的基准时间δt0短,因此不输出臂短路探测信号e1。
68.另外,在不存在负载短路故障的状态下,没有流过过大的上臂电流i110或下臂电流i120,因此从罗哥夫斯基线圈40得到的感应电压vm也不会成为较大的值。在图3所示的例子中,从罗哥夫斯基线圈40得到的感应电压vm没有偏离规定的基准值
±
v0的范围,因此不输出负载短路探测信号e2。因而,在图3所示的例子中不输出短路探测信号e。
69.图5是在进行上臂110的开关动作时在下臂120产生短路故障的情况下的电力变换装置100的波形图。图6是示出在图5所示的期间a、b以及d内的电力变换装置100的动作的电路图。
70.与图3和图4所示的例子同样,在图5和图6所示的例子中,交替地重复进行上臂110的开关动作、即图2所示的上臂接通模式和上臂断开模式(回流模式)。
71.在图5所示的例子中,期间a与期间b的边界是上臂110的开通的开始。在期间a内的电力变换装置100的动作与通常开通时(图3和图4)的电力变换装置100的动作相同。
72.上臂110的开通开始。在期间b内,如图6所示,上臂电流i110(漏极电流)从高电位电源线101p经由半导体开关元件q1流通。与上述的通常开通时的电力变换装置100的动作同样,在期间b内,上臂电流i110经由第一电流路103p和第二电流路103n流向下臂120,使二极管d2的回流电流减少,此后,变为二极管d2的反向恢复电流。
73.另一方面,当下臂120的半导体开关元件q2存在短路故障时,在期间b内,上臂电流i110经由第一电流路103p和第二电流路103n流向半导体开关元件q2。在此,半导体开关元件q2的短路故障除了包括半导体开关元件q2的击穿等故障之外,还包括半导体开关元件q2因噪声等影响而误变为接通的故障。
74.这样,在下臂120产生了臂短路故障的情况下,在期间b内,两个过程同时进行。其中一个是使二极管d2的回流电流减少,之后使反向恢复电流在二极管d2中流过的过程。另一个是使上臂电流i110在下臂120的半导体开关元件q2中流过的过程。因此,在第一电流路103p和第二电流路103n中长期持续地流过相同变化率的电流。但是,流过第一电流路103p的电流的极性与流过第二电流路103n的电流的极性相反。然后,罗哥夫斯基线圈40的感应电压vm维持零电压的期间超过基准时间δt0,输出臂短路探测信号e1。其结果,输出短路探测信号e。
75.当输出短路探测信号e时,在第一栅极驱动电路10中,由切换电路13将栅极-源极间电压vgs(q1)的供给源从驱动电路11切换为短路电流切断电路12,从第一栅极驱动电路10输出使半导体开关元件q1断开的栅极-源极间电压vgs(q1)。接着,当输出短路探测信号e时,在第二栅极驱动电路20中,由切换电路23将栅极-源极间电压vgs(q2)的供给源从驱动电路21切换为短路电流切断电路22,从第二栅极驱动电路20输出使半导体开关元件q2断开的栅极-源极间电压vgs(q2)。
76.其结果,开始上臂电流i110和下臂电流i120双方减少的期间d。这样,在本实施方式中,通过检测到臂短路故障来切断臂短路电流。
77.以上,说明了与进行上臂开关动作时的下臂的短路故障的探测有关的动作。在进行下臂开关动作时产生了上臂的短路故障的情况下也通过同样的动作来探测臂短路故障。在该情况下,在下臂的开通开始后,在第一电流路103p和第二电流路103n中也分别流过相同大小的电流。但是,流过第一电流路103p的电流的极性与流过第二电流路103n的电流的极性相反。然后,罗哥夫斯基线圈40的感应电压vm持续基准时间δt0以上地处于零电压。感应电压检测电路31基于该零电压的持续时间来探测臂短路故障。如上所述,检测电路30基于感应电压vm(检测信号)的绝对值小于阈值(第一阈值)的持续时间,来检测上臂110或下臂120的短路故障。
78.图7是示出表示在进行上臂110的开关动作时在负载z产生短路故障的情况下的电力变换装置100的动作的波形的波形图。图8是示出在图7所示的期间a、b、c以及e内的电力变换装置100的动作的电路图。
79.与通常开通时同样地(参照图3和图4),在图7和图8所示的例子中,交替地重复进行上臂110的开关动作、即图2所示的上臂接通模式和上臂断开模式(回流模式)。
80.在图7所示的例子中,期间a与期间b的边界是上臂110的开通的开始。在期间a、b以
及c内的电力变换装置100的动作与通常开通时(图3和图4)的期间a、b以及c内的电力变换装置100的动作相同。
81.当在负载z产生短路故障时,在期间c内,上臂电流i110随着时间经过而增加,上臂电流i110变得过大,流过第一电流路103p的上臂电流i110的时间梯度di/dt也变得过大。因此,罗哥夫斯基线圈40的感应电压vm变为阈值+v0以上。其结果,输出负载短路探测信号e2和短路探测信号e,期间e开始。
82.在期间e内,根据短路探测信号e,来从第一栅极驱动电路10输出使半导体开关元件q1断开的栅极-源极间电压vgs(q1),从第二栅极驱动电路20输出使半导体开关元件q2断开的栅极-源极间电压vgs(q2)。由此,切断负载短路电流。
83.根据以上的本实施方式,短路故障检测装置50具有1个罗哥夫斯基线圈40和1个检测电路30。针对两个臂(上臂110和下臂120)设置了1个罗哥夫斯基线圈40。检测电路30能够探测在电力变换装置100中产生的短路故障(在逆变器的1个相的情况下,为上臂110的臂短路故障、下臂120的臂短路故障或负载z的短路故障),并切断短路电流。由此,根据本实施方式,能够避免电力变换装置100的大型化和复杂化并检测电力变换装置100中的短路故障。
84.《变形例》
85.以上,说明了本发明的一个实施方式,但能够想到以下的变形例。能够在不与实施方式产生矛盾的范围内任意地组合一个或多个变形例。
86.(1)第一变形例
87.图9是具备第一变形例中的短路故障检测装置50a的电力变换装置100的电路图。在上述实施方式(图1)中的短路故障检测装置50中,在罗哥夫斯基线圈40中存在第一电流路103p和第二电流路103n。第一电流路103p是上臂110与ac输出端子102(上臂110和下臂120的公共连接点)之间的电流路。第二电流路103n是下臂120与ac输出端子102之间的电流路。与此相对地,在图9所示的短路故障检测装置50a中,在罗哥夫斯基线圈40a中存在第一电流路103pa和第二电流路103na。第一电流路103pa位于上臂110与高电位电源线101p之间。第二电流路103na位于下臂120与低电位电源线101n之间。在第一变形例中,在产生了臂短路故障的情况下,在第一电流路103pa和第二电流路103na也分别流过相同大小的电流。但是,流过第一电流路103pa的电流的极性与流过第二电流路103na的电流的极性相反。能够通过第一变形例来探测臂短路故障。另外,在第一变形例中,在产生负载短路故障时,在第一电流路103pa或第二电流路103na中也流过随着时间经过而增加的过大的电流,因此能够探测负载短路故障。
88.(2)第二变形例
89.实施方式的电力变换装置也可以应用于除了将直流电力变换为交流电力的逆变器以外的电力变换装置,例如dc/dc转换器或ac/ac转换器。
90.(3)第三变形例
91.在上述实施方式中,作为半导体开关元件的例子而列举了mosfet,但是半导体开关元件不限定于此,例如也可以是igbt(insulated gate bipolar transistor;绝缘栅双极型晶体管)等半导体开关元件。
92.(4)第四变形例
93.在上述实施方式中,也可以设为能够通过用户的操作来调整基准时间δt0和基准
值
±
v0。
94.(5)第五变形例
95.也可以设置对电力变换装置100进行控制的上级装置。在该情况下,电力变换装置100只要在上臂控制信号和下臂控制信号的供给期间内从上级装置接收有效电平控制信号,在除此以外的期间接收成为无效电平的控制信号即可。而且,也可以将该控制信号与短路探测信号e的逻辑乘积供给到切换电路13、23。在半导体开关元件q1、q2处于断开时,有时罗哥夫斯基线圈40的感应电压vm超过基准时间δt0地维持零电压。在该情况下,能够通过切换电路13来防止半导体开关元件q1的栅极的连接目的地从驱动电路11切换为短路电流切断电路12。切换电路23也同样。
96.(6)第六变形例
97.图10是第六变形例中的电力变换装置的侧视图。在图10的例子中,半导体模块210具有封装210p以及从封装210p的底面突出的3个端子211~213。另外,半导体模块220具有封装220p以及从封装220p的底面突出的3个端子221~223。在封装210p内收容有图1所示的上臂110。上臂110包括半导体开关元件q1以及与其反向并联连接的二极管d1。在此,端子211与半导体开关元件q1的栅极连接,端子212与半导体开关元件q1的漏极连接。端子213与半导体开关元件q1的源极连接。另外,在封装220p内收容有图1所示的下臂120。下臂120包括半导体开关元件q2以及与其反向并联连接的二极管d2。在此,端子221与半导体开关元件q2的栅极连接。端子222与半导体开关元件q2的漏极连接。端子223与半导体开关元件q2的源极连接。
98.所有端子(211~213和221~223)隔开间隔地排成一条直线。这些端子分别沿一个方向延伸,并贯通栅极布线基板230、罗哥夫斯基布线基板240以及主电路布线基板250。
99.在栅极布线基板230配置有图1所示的第一栅极驱动电路10、第二栅极驱动电路20以及检测电路30。另外,栅极布线基板230具有提供第一栅极驱动电路10的输出信号的导体图案。端子211与该导体图案连接。同样地,在栅极布线基板230具有提供第二栅极驱动电路20的输出信号的导体图案。端子221与该导体图案连接。
100.主电路布线基板250具有与图1所示的高电位电源线101p对应的导体图案。端子212与该导体图案连接。另外,主电路布线基板250具有与图1所示的低电位电源线101n对应的导体图案。端子223与该导体图案连接。另外,主电路布线基板250具有与图1所示的ac输出端子102对应的导体图案。端子213和端子222与该导体图案连接。即,在该例子中,端子213与图1所示的第一电流路103p对应,端子222与图1所示的第二电流路103n对应。
101.在罗哥夫斯基布线基板240配置有相当于图1所示的罗哥夫斯基线圈40的罗哥夫斯基线圈243。图11是从半导体模块210和半导体模块220的上方观察时的罗哥夫斯基布线基板240的俯视图。如图11所示,罗哥夫斯基线圈243具有包含开始点和结束点的螺旋线圈241以及包含第一端和第二端的返回线242。返回线242的第一端与螺旋线圈241的结束点连接,返回线242的第二端通过螺旋线圈241的内部后返回到螺旋线圈241的开始点。而且,端子213和端子222(即图1中的第一电流路103p和第二电流路103n)被罗哥夫斯基线圈243包围。螺旋线圈241的开始点和返回线242的第二端经由通孔布线(未图示)来与栅极布线基板230上的检测电路30连接。
102.因而,根据第六变形例,能够得到与图1所示的实施方式同样的效果。此外,在第六
变形例中,将配置有罗哥夫斯基线圈243的罗哥夫斯基布线基板240和栅极布线基板230设为了不同的基板,但这些基板也可以是同一个。对于后述的第七变形例(参照图12和图13)也是同样的。
103.(7)第七变形例
104.图12是第七变形例中的电力变换装置的侧视图。与图10和图11所示的第六变形例同样地,电力变换装置具有半导体模块210、半导体模块220、栅极布线基板230、罗哥夫斯基布线基板240以及主电路布线基板250。图13是从半导体模块210和半导体模块220的上方观察时的罗哥夫斯基布线基板240的俯视图。
105.在第七变形例中,在以下方面与图10和图11所示的第六变形例不同。在第六变形例中,端子213和端子222(即图1所示的第一电流路103p和第二电流路103n)被罗哥夫斯基布线基板240上的罗哥夫斯基线圈243包围。与此相对地,在图12和图13所示的第七变形例中,端子212和端子223(即图9所示的第一电流路103pa和第二电流路103na)被罗哥夫斯基布线基板240上的罗哥夫斯基线圈243包围。
106.因而,根据第七变形例,能够得到与图9所示的第一变形例同样的效果。
107.(8)第八变形例
108.图14是第八变形例中的电力变换装置的俯视图。另外,图15是第八变形例中的电力变换装置的侧视图。在图14和图15所示的例子中,半导体模块300是二合一型半导体模块,其收容有图9所示的上臂110和下臂120各自的多个元件。在半导体模块300的上表面有绝缘体的垫片311、312及313。在垫片311、312及313各自的上部分别配置有端子部361、362及363。另外,垫片312和垫片313配置在电路基板320上。在电路基板320安装有驱动控制电路部330。驱动控制电路部330包括图9所示的第一栅极驱动电路10、第二栅极驱动电路20以及检测电路30。
109.在半导体模块300内,上臂110的半导体开关元件q1的源极与下臂120的半导体开关元件q2的漏极共同连接,其公共连接点与端子部361连接。即,端子部361与图9所示的ac输出端子102对应,与图14中未图示的负载连接。
110.另外,在半导体模块300内,上臂110的半导体开关元件q1的漏极与端子部362连接。端子部362与图9所示的高电位电源线101p对应。即,在该例子中,上臂110的半导体开关元件q1内置于半导体模块300,将端子部362与半导体开关元件q1的漏极连接的布线相当于图9所示的第一电流路103pa。
111.另外,在半导体模块300内,下臂120的半导体开关元件q2的源极与端子部363连接。端子部363与图9所示的低电位电源线101n对应。即,在该例子中,下臂120的半导体开关元件q2内置于半导体模块300,将端子部363与半导体开关元件q2的源极连接的布线相当于图9所示的第二电流路103na。
112.如图14所示,在电路基板320配置有绕两个电流路的周围一圈的罗哥夫斯基线圈340。两个电流路中的一个是从半导体模块300至端子部362的第一电流路103pa,另外一个是从半导体模块300至端子部363的第二电流路103na。罗哥夫斯基线圈340具有包含开始点和结束点的螺旋线圈341以及包含第一端和第二端的返回线342。返回线342的第一端与螺旋线圈341的结束点连接,返回线342的第二端通过螺旋线圈341的内部后返回到螺旋线圈341的开始点。而且,螺旋线圈341的开始点和返回线342的第二端与驱动控制电路部330内
的检测电路30连接。
113.因而,根据第八变形例,能够得到与图9所示的第一变形例同样的效果。另外,根据第八变形例,同高电位电源线101p对应的端子部362与同低电位电源线101n对应的端子部363如图14所示那样相邻。与端子部362连接的第一电流路103pa以及与端子部363连接的第二电流路103na被罗哥夫斯基线圈340包围,因此具有简化半导体模块的结构这样的效果。
114.(9)第九变形例
115.在上述的变形例中,罗哥夫斯基线圈被配置于半导体模块的外部。但是,罗哥夫斯基线圈也可以嵌入在半导体模块内。
116.图16是第九变形例中的电力变换装置的侧视图。此外,在图16中,对与图14和图15所示的部分对应的部分使用共同的附图标记,并省略说明。
117.在图16所示的第九变形例中,电路基板320a相当于图14所示的电路基板320,且不具有图14所示的罗哥夫斯基线圈340。取而代之的是,罗哥夫斯基线圈340a被嵌入在半导体模块300a内,并与电路基板320a的驱动控制电路部330(参照图14)连接。
118.更详细来说,在图16的例子中,半导体模块300a具有元件区域370。元件区域370位于半导体模块300a的内部,是配置图9所示的上臂110和下臂120各自的多个元件的区域。在元件区域370中,上臂110的半导体开关元件q1的源极与下臂120的半导体开关元件q2的漏极共同连接,其公共连接点经由导体层361a来与端子部361连接。
119.另外,在元件区域370中,上臂110的半导体开关元件q1的漏极经由导体层362a来与端子部362连接。即,在该例子中,半导体开关元件q1内置于半导体模块300a。导体层362a是将端子部362与半导体开关元件q1的漏极连接的层,相当于图9所示的第一电流路103pa。
120.另外,在元件区域370中,下臂120的半导体开关元件q2的源极经由导体层363a来与端子部363连接。即,在该例子中,半导体开关元件q2内置于半导体模块300a。导体层363a是将端子部363与半导体开关元件q2的源极连接的层,相当于图9中的第二电流路103na。这样,在图16所示的例子中,除上臂110和下臂120之外,第一电流路103pa和第二电流路103na也收容在半导体模块300内。
121.在图16的例子中,罗哥夫斯基线圈340a被嵌入在半导体模块300a内,绕导体层362a和363a(即第一电流路103pa和第二电流路103na)的周围一圈。能够考虑到各种方法作为用于将罗哥夫斯基线圈340a嵌入到半导体模块300a内的方法。例如,也可以是,在半导体模块内形成绕第一电流路103pa和第二电流路103na的周围一圈的空间,在该空间内配置罗哥夫斯基线圈340a。或者,也可以是,将罗哥夫斯基线圈340a配置于半导体模块300a,罗哥夫斯基线圈340a在第一电流路103pa和第二电流路103na的周围绕一圈。之后,也可以利用树脂等绝缘构件来密封半导体模块300a。
122.根据第九变形例,能够得到与图14和图15所示的第八变形例同样的效果。另外,根据第九变形例,将罗哥夫斯基线圈340a嵌入于半导体模块300a内,因此与图14和图15所示的第八变形例相比,能够更加简单地将短路故障检测装置安装到电力变换装置。另外,与图14和图15所示的第八变形例相比,能够抑制垫片311、312间和垫片312、313间的沿面距离的减少。
123.附图标记说明
124.100:电力变换装置;101p:高电位电源线;101n:低电位电源线;110:上臂;120:下
臂;q1、q2:半导体开关元件;d1、d2:二极管;10:第一栅极驱动电路;20:第二栅极驱动电路;11、21:驱动电路;21、22:短路电流切断电路;13、23:切换电路;50、50a:短路故障检测装置;40、40a:罗哥夫斯基线圈;102:ac输出端子;103p、103pa:第一电流路;103n、103na:第二电流路;30:检测电路;31:感应电压检测电路;32:判定电路;33:比较电路;34:或门;210、220、300、300a:半导体模块;210p、220p:封装;211~213、221~223:端子;240、320、320a:电路基板;243、340、340a:罗哥夫斯基线圈;241、341:螺旋线圈;242、342:返回线;311~313:垫片;320:电路基板;330:驱动控制电路部;361~363:端子部;361a~363a:导体层;370:元件区域;230:栅极布线基板;240:罗哥夫斯基布线基板;250:主电路布线基板。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1