可升降式旋转摘锭平台的制作方法
1.本发明涉及旋转摘锭领域,尤其涉及一种可升降式旋转摘锭平台。
背景技术:
2.苹果是蔷薇科苹果亚科苹果属植物,其树为落叶乔木。苹果营养价值很高,富含矿物质和维生素,含钙量丰富,有助于代谢掉体内多余盐分,苹果酸可代谢热量,防止下半身肥胖。
3.苹果是一种低热量的食物,每100克产生大约60千卡左右的热量。苹果中营养成分可溶性大,容易被人体吸收,故有“活水”之称。它有利于溶解硫元素,使皮肤润滑柔嫩。
4.当前,使用旋转式摘锭以及自带升降装置的苹果抓取结构存在以下缺陷:升降装置的高度固定,或者需要人工进行调节,导致无法满足不同生长高度以及苹果锭体分布密度不同的各颗苹果树体的摘锭采摘需求,容易出现升降装置相对于苹果树体的合适摘锭高度过高或者过低的场景。
技术实现要素:
5.为了解决相关领域的技术问题,本发明提供了一种可升降式旋转摘锭平台,能够针对使用旋转式摘锭以及自带升降装置的苹果抓取结构,根据苹果锭体最密集出现的高度,自适应设置升降装置的定位高度,从而方便旋转式摘锭机构执行摘锭操作,缩短摘锭操作需要经历的行程。
6.为此,本发明至少需要具备以下几处重要的发明点:
7.(1)引入针对性的视觉检测机制,对当前待摘锭的苹果树体的逐层高度的锭体分布密度进行现场测量,其中,以像素行为单位执行视觉上的锭体分布密度的逐行分析;
8.(2)基于当前待摘锭的苹果树体的逐层高度的锭体分布密度自适应选择执行摘锭的升降装置的当前升降高度,从而保证升降装置一直保持在便于执行摘锭操作的合适高度。
9.根据本发明的一方面,提供了一种可升降式旋转摘锭平台,所述平台包括:
10.行走机器人主体,包括旋转式摘锭结构、升降平台装置、锭体收纳袋体、行走机构、实时定位机构、障碍检测机构和无线通信机构;
11.其中,在所述行走机器人主体中,所述行走机构设置在所述行走机器人主体的底部,所述升降平台装置设置在所述行走机构的正上方。
12.更具体地,在所述可升降式旋转摘锭平台中:
13.在所述行走机器人主体中,所述障碍检测机构采用红外线测距模式或者超声波测距模式对周围障碍物执行定位检测。
14.更具体地,在所述可升降式旋转摘锭平台中:
15.在所述行走机器人主体中,所述旋转式摘锭结构、所述无线通信机构和所述实时定位机构都安装在所述升降平台装置上,所述实时定位机构给出所述行走机器人主体在所
在苹果种植园内的实时定位数据。
16.更具体地,在所述可升降式旋转摘锭平台中,所述平台还包括:
17.所述旋转式摘锭结构包括可旋转摘锭头、旋转电机、机械手臂和手臂驱动电机,所述旋转电机与所述可旋转摘锭头连接,用于为所述可旋转摘锭头的旋转提供动力,所述手臂驱动电机包括多个电机单元以分别为所述机械手臂的各个臂体单元提供动力;
18.数据录拍机构,内置光电传感器,用于在所述行走机器人主体抵达到当前待摘锭的苹果树体的前方时,执行对当前待摘锭的苹果树体的录拍操作,以获得对应的树体录拍画面;
19.信号滤波设备,设置在所述升降平台装置的外壳内,与所述数据录拍机构连接,用于对接收到的树体录拍画面执行方向滤波处理,以获得对应的滤波处理画面;
20.内容增强设备,设置在所述升降平台装置的外壳内,与所述信号滤波设备连接,用于对接收到的滤波处理画面执行图像内容的增强处理,以获得对应的内容增强画面;
21.锭体辨识机构,与所述内容增强设备连接,用于基于苹果外形特征从所述内容增强画面中辨识各个苹果锭体分别所在的各个图像区域;
22.区域分析机构,与所述锭体辨识机构连接,用于获取在所述内容增强画面中构成所述各个图像区域的所有像素点以获得各个锭体像素点,检测所述内容增强画面中每一个像素行上分布的锭体像素点的数量;
23.编号解析机构,与所述区域分析机构连接,用于对所述内容增强画面中各个像素行上分布的锭体像素点的数量进行排序,将分布锭体像素点的数量最多的像素行的编号作为目标编号发出;
24.其中,所述升降平台装置内置有升降电机,用于与所述编号解析机构连接,用于基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致;
25.基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致包括:接收到的目标编号的数值越大,调节后的所述升降平台装置的升降高度越高;
26.其中,基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致还包括:采用数值拟合函数以所述内容增强画面中像素行的编号作为函数的输入数据以所述内容增强画面中像素行对应的当前待摘锭的苹果树体的实体位置的高度作为函数的输出数据建立所述数值拟合函数用于模拟所述内容增强画面中像素行的编号与所述内容增强画面中像素行对应的当前待摘锭的苹果树体的实体位置的高度的数值对应关系。
27.根据本发明的另一方面,还提供了一种可升降式旋转摘锭方法,所述方法包括使用一种如上述的可升降式旋转摘锭平台,用于基于当前待摘锭的苹果树体的逐层高度的锭体分布密度自适应选择执行摘锭的升降装置的当前升降高度。
28.本发明的可升降式旋转摘锭平台结构紧凑、节能环保。由于能够针对自带升降装
置的苹果抓取结构,根据苹果锭体最密集出现的高度,自适应设置升降装置的定位高度,从而缩短摘锭操作需要经历的行程,节省现场需要耗费的功耗。
附图说明
29.以下将结合附图对本发明的实施方案进行描述,其中:
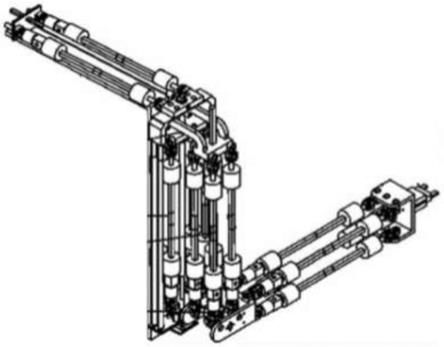
30.图1为根据本发明实施方案示出的可升降式旋转摘锭平台的机械手臂的外形结构图。
具体实施方式
31.下面将参照附图对本发明的可升降式旋转摘锭平台的实施方案进行详细说明。
32.苹果品种数以百计,分为酒用品种、烹调品种、鲜食品种3大类。3类品种的大小、颜色、香味、光滑度(可能还有脆性、风味)等特点均有差别。不少品种含糖较高,中等酸度,丹宁含量很低。苹果除生食外,烹食方法也很多,常用作点心馅,苹果馅烤饼可能是最早的美国式甜食。炸苹果常与香肠、猪排等菜肴同食,尤其在欧洲特别普遍。最新的分类学证据显示苹果属的成员也不过38种,要查出一个“属谱”似乎也并非难事,但是每个种似乎都跟我们吃到的苹果有共同之处,并且每个种都可以提供一些水果,虽然有些味道着实不怎么样。从这个角度看,苹果属的每个种都有可能为超市中苹果的甘甜贡献了一分力量。大概在2000多年前,世界各地的果园都有种植。
33.苹果树多为异花授粉,有2%~4%的花座果较为理想。虽然成熟苹果的大小、形状、颜色和酸度因品种和环境条件的不同而差异很大,但通常圆形,直径50~100毫米,带红色或黄色。
34.当前,使用旋转式摘锭以及自带升降装置的苹果抓取结构存在以下缺陷:升降装置的高度固定,或者需要人工进行调节,导致无法满足不同生长高度以及苹果锭体分布密度不同的各颗苹果树体的摘锭采摘需求,容易出现升降装置相对于苹果树体的合适摘锭高度过高或者过低的场景。
35.为了克服上述不足,本发明搭建了一种可升降式旋转摘锭平台,能够有效解决相应的技术问题。
36.根据本发明实施方案示出的可升降式旋转摘锭平台包括:
37.行走机器人主体,包括旋转式摘锭结构、升降平台装置、锭体收纳袋体、行走机构、实时定位机构、障碍检测机构和无线通信机构;
38.其中,在所述行走机器人主体中,所述行走机构设置在所述行走机器人主体的底部,所述升降平台装置设置在所述行走机构的正上方。
39.接着,继续对本发明的可升降式旋转摘锭平台的具体结构进行进一步的说明。
40.所述可升降式旋转摘锭平台中:
41.在所述行走机器人主体中,所述障碍检测机构采用红外线测距模式或者超声波测距模式对周围障碍物执行定位检测。
42.所述可升降式旋转摘锭平台中:
43.在所述行走机器人主体中,所述旋转式摘锭结构、所述无线通信机构和所述实时定位机构都安装在所述升降平台装置上,所述实时定位机构给出所述行走机器人主体在所
在苹果种植园内的实时定位数据。
44.所述可升降式旋转摘锭平台中还可以包括:
45.所述旋转式摘锭结构包括可旋转摘锭头、旋转电机、机械手臂和手臂驱动电机,所述旋转电机与所述可旋转摘锭头连接,用于为所述可旋转摘锭头的旋转提供动力,所述手臂驱动电机包括多个电机单元以分别为所述机械手臂的各个臂体单元提供动力;
46.其中,如图1所示,给出了所述旋转式摘锭结构中的机械手臂的具体结构;
47.数据录拍机构,内置光电传感器,用于在所述行走机器人主体抵达到当前待摘锭的苹果树体的前方时,执行对当前待摘锭的苹果树体的录拍操作,以获得对应的树体录拍画面;
48.信号滤波设备,设置在所述升降平台装置的外壳内,与所述数据录拍机构连接,用于对接收到的树体录拍画面执行方向滤波处理,以获得对应的滤波处理画面;
49.内容增强设备,设置在所述升降平台装置的外壳内,与所述信号滤波设备连接,用于对接收到的滤波处理画面执行图像内容的增强处理,以获得对应的内容增强画面;
50.锭体辨识机构,与所述内容增强设备连接,用于基于苹果外形特征从所述内容增强画面中辨识各个苹果锭体分别所在的各个图像区域;
51.区域分析机构,与所述锭体辨识机构连接,用于获取在所述内容增强画面中构成所述各个图像区域的所有像素点以获得各个锭体像素点,检测所述内容增强画面中每一个像素行上分布的锭体像素点的数量;
52.编号解析机构,与所述区域分析机构连接,用于对所述内容增强画面中各个像素行上分布的锭体像素点的数量进行排序,将分布锭体像素点的数量最多的像素行的编号作为目标编号发出;
53.其中,所述升降平台装置内置有升降电机,用于与所述编号解析机构连接,用于基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致;
54.基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致包括:接收到的目标编号的数值越大,调节后的所述升降平台装置的升降高度越高;
55.其中,基于接收到的目标编号调节所述升降平台装置的升降高度以使得升降后的所述升降平台装置的底部的高度与分布锭体像素点的数量最多的像素行对应的当前待摘锭的苹果树体的实体位置的高度一致还包括:采用数值拟合函数以所述内容增强画面中像素行的编号作为函数的输入数据以所述内容增强画面中像素行对应的当前待摘锭的苹果树体的实体位置的高度作为函数的输出数据建立所述数值拟合函数用于模拟所述内容增强画面中像素行的编号与所述内容增强画面中像素行对应的当前待摘锭的苹果树体的实体位置的高度的数值对应关系。
56.所述可升降式旋转摘锭平台中:
57.将分布锭体像素点的数量最多的像素行的编号作为目标编号发出包括:在所述内容增强画面中,最底部的像素行的编号为1,最底部的像素行上的各个像素行的各个编号逐
行加1。
58.所述可升降式旋转摘锭平台中:
59.基于苹果外形特征从所述内容增强画面中辨识各个苹果锭体分别所在的各个图像区域包括:基于单锭苹果的标准成像图片从所述内容增强画面中辨识各个苹果锭体分别所在的各个图像区域。
60.所述可升降式旋转摘锭平台中:
61.基于单锭苹果的标准成像图片从所述内容增强画面中辨识各个苹果锭体分别所在的各个图像区域包括:单锭苹果的标准成像图片不止一个且分别对应不同成像视角。
62.所述可升降式旋转摘锭平台中:
63.在所述行走机器人主体中,所述行走机构与所述障碍检测机构连接,用于基于所述障碍检测机构的定位检测结果确定相应的行走策略以避免与周围障碍物相撞。
64.同时,为了克服上述不足,本发明还搭建了一种可升降式旋转摘锭方法,所述方法包括使用一种如上述的可升降式旋转摘锭平台,用于基于当前待摘锭的苹果树体的逐层高度的锭体分布密度自适应选择执行摘锭的升降装置的当前升降高度。
65.另外,苹果是落叶乔木,有较强的极性,通常生长旺盛,树冠高大,树高可达15米,栽培条件下一般高3~5米左右。树干灰褐色,老皮有不规则的纵裂或片状剥落,小枝光滑。果实为仁果,颜色及大小因品种而异。喜光,喜微酸性到中性土壤。最适于土层深厚、富含有机质、心土为通气排水良好的沙质土壤。
66.繁殖栽培用嫁接繁殖。砧木有乔化砧和矮化砧。常用乔化砧有:楸子、西府海棠、山荆子,矮化砧主要引进英国品种。采用宽行密植,行向南北。偏南部地区秋冬土壤封冻前栽植,偏北部地区春季解冻时栽植。苹果自花结实力差,栽植时必须配置授粉树。
67.苹果树栽后2~3年开始结果,经济寿命在一般管理条件下为15~50年,土壤瘠薄、管理粗放的只有20~30年。由于顶端优势和芽的异质性综合作用的结果,苹果通常具有较强的干性和明显的层性。因品种间的萌芽力和成枝力有差异,其层性的明显程度也不同。苹果的芽按性质分为叶芽、花芽两种。叶芽呈三角形,尖长而弯曲,展叶后长成枝,叫做新梢或营养枝。枝条按生长状况可分为:徒长枝、普通枝、纤细枝、叶丛枝:苹果的花芽为混合芽。腋花芽枝,在当年生枝的叶腋处形成的芽,第二年能开花结果的叫腋花芽。苹果的花芽分化,多数品种都是从6月上旬开始至入冬前完成,整个过程分为生理分化、形态分化和性细胞成熟三个时期。花芽为混合芽,花序为伞房状聚伞花序。每个花序开花5~7朵。
68.尽管已经参考优选的实施方案详细描述了本发明,本领域技术人员理解可以对其进行各种改进和替换而不背离在所附权利要求中给出的本发明精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1