一种自动调整的秸秆翻旋联合整地机的制作方法
1.本发明属于农业机械设备领域,具体涉及一种自动调整的秸秆翻旋联合整地机。
背景技术:
2.我国是一个粮食生产大国,在农业生产过程中会产生大量的农作物秸秆,农作物秸秆中富含氮、磷、钾、钙、镁和有机质等,是一种具有多用途的可再生生物资源,如果处理不当会浪费资源,污染环境,甚至影响农作物的生长。反之,充分利用农作物秸秆不仅可以减少环境污染和资源浪费,还可以补充土壤肥力,改善土壤结构,有利于构建资源节型、环境友好型社会,符合可持续发展战略。
3.农作物秸秆的主要成分是纤维素,其分解过程中需要大量微生物的参与,目前我国普遍采用旋耕机进行秸秆还田的方法对秸秆的破碎效果差,打碎后的秸秆依旧留在地表面,农作物秸秆与微生物结合发酵效果不好;而且旋耕机耕作深度有限,长期旋耕作业容易使土壤产生犁底层,造成土壤板结,犁底层坚实过厚对物质的转移、能量的传递、作物根系下伸和土壤通透性都非常不利,严重影响农作物根系的生长,还会引发病虫害。此外,旋耕机作业自动化程度低,难以保证旋耕深度和耕作地面平整度,不能为后续播种提供优质的种床,不利于农田灌溉和后续机械化作业。多类机具分别依次进地作业既加大了作业成本,又增加了土壤压实度,作业效率不高。
4.综上所述,有必要将残留秸秆等破碎、秸秆翻埋与地表平整功能集成为一种联合整地机,该联合整地机作业过程中应该先将农作物残留秸秆等破碎,再进行破碎秸秆的翻埋,还应能旋耕土壤、同时还应该能够自动调整旋耕深度和耕作地面平整度,以满足高质量的播种地面平整度要求;这样既适于农艺要求,又能降低农业生产成本、提高生产效率、有利于增产增收。
技术实现要素:
5.本发明公开了一种自动调整的秸秆翻旋联合整地机,该整地机将破茬、秸秆翻埋和旋耕集成为一体,分别通过超声波传感器和单轴倾角传感器检测旋耕深度和刮土板水平度,利用耕深调整装置和刮平调整装置分别结合电液控制系统完成对旋耕刀入土深度和刮土板水平度的调整。该整地机能精准地控制旋耕深度和耕作地面平整度,结构可靠,自动化程度高,有利于降低作业成本、提高作业效率,作业后的优质土壤有助于提高农作物产量。
6.为实现上述目的,本发明采取以下技术方案:一种自动调整的秸秆翻旋联合整地机,主要由破茬装置、秸秆翻埋装置、旋耕装置、耕深调整装置、刮土板、刮平调整装置和镇压辊构成。
7.破茬装置包括破茬装置齿轮箱、破茬装置机架、破茬装置侧传动箱、破茬刀,所述破茬装置齿轮箱固定于主机架前端上侧,所述破茬装置机架固定于主机架前端下侧,所述破茬装置侧传动箱固定于主机架前端左侧,所述破茬刀固定连接在破茬装置刀轴上,刀轴从破茬装置侧传动箱获得动力,相对于破茬装置机架做定轴转动。秸秆翻埋装置包括交错
式双翼开沟犁和单翼铧式犁,所述交错式双翼开沟犁位于破茬装置后部,固定在主机架中间的支撑梁上,所述单翼铧式犁位于交错式双翼开沟犁后,在主机架后部呈左右对称布置。
8.旋耕装置包括旋耕机机架、旋耕机悬挂机构、旋耕机齿轮箱、旋耕刀和旋耕机挡土罩,所述旋耕机机架布置在主机架尾部,焊接在旋耕机悬挂机构上,所述旋耕机悬挂机构上侧与耕深调整上摆臂后部铰接,下侧与耕深调整下摆臂后部铰接,旋耕机悬挂机构中悬挂侧连接板、悬挂横梁、悬挂横梁加强梁、悬挂三角支架焊接在一起,悬挂后拉杆通过螺栓固定在旋耕机机架上,悬挂后拉杆连接杆分别与悬挂三角支架和悬挂后拉杆铰接,所述旋耕机齿轮箱固定在旋耕机机架中上部,所述旋耕刀固定连接在旋耕机刀轴上,刀轴从旋耕机齿轮箱获得动力,相对于旋耕机机架做定轴转动,所述旋耕机挡土罩固定在旋耕机机架尾部上侧。
9.耕深调整装置包括支撑板、前置悬挂连接杆、耕深调整上摆臂、耕深调整下摆臂、耕深调整下摆臂固定支座、耕深调整液压缸、超声波传感器,所述支撑板位于破茬装置齿轮箱后部、固定在主机架上侧,所述前置悬挂连接杆前侧与三点悬挂上连接点铰接、后侧与支撑板铰接,所述耕深调整上摆臂前部铰接在支撑板上侧、后部铰接在悬挂三角支架顶端,所述耕深调整下摆臂固定支座焊接在主机架上侧,所述耕深调整下摆臂前部铰接在耕深调整下摆臂固定支座上、后部铰接在旋耕机悬挂机构上、并且中间设有加强梁,所述耕深调整液压缸前部铰接在主机架上,后部铰接在耕深调整下摆臂上,所述超声波传感器固定在旋耕机机架两侧。
10.刮平调整装置包括弯梁、刮土板支撑板、单轴倾角传感器、刮土板水平调整液压缸、横梁支架、刮平调整辅助液压缸、轴承连接结构,所述弯梁铰接在旋耕机机架上,所述刮土板支撑板焊接在弯梁尾部内侧,所述单轴倾角传感器固定在刮土板中间,所述横梁支架焊接在两弯梁之间,所述刮平调整辅助液压缸分别与横梁支架和旋耕机机架铰接,所述刮土板水平调整液压缸分别与横梁支架和刮土板铰接。
11.所述刮土板通过轴承连接结构与刮土板支撑板构成只可相对转动的连接。
12.所述镇压辊通过镇压辊连接板连接在刮土板上。
13.该联合整地机工作时与拖拉机的三点悬挂连接,由拖拉机提供动力,破茬装置齿轮箱将拖拉机辅助动力输出轴的动力分为两部分,其中一部分通过破茬装置侧传动箱驱动破茬刀轴转动,另一部分依次通过“万向节—前部传动轴—万向节—后部传动轴—万向节”的顺序传至旋耕机齿轮箱。在拖拉机的牵引下,首先破茬装置通过破茬刀的旋转将残留秸秆等打碎,随后翻埋装置通过交错式双翼开沟犁、单翼铧式犁打破犁底层,并对打碎后的碎渣进行翻埋,然后旋耕装置带动旋耕刀旋转打碎大块土壤,打碎后的土壤撞击旋耕机挡土罩落到地面,最后通过刮土板把地面刮平再用镇压辊对土壤进行镇压。在工作的同时,超声波传感器实时检测机架到地面的距离间接算出耕作深度,将信号传递给控制系统,控制系统进行逻辑运算后对液压系统电磁阀发出指令驱动两个耕深调整液压缸和两个刮平调整辅助液压缸做伸缩运动,两个耕深调整液压缸推动耕深调整下摆臂绕耕深调整下摆臂固定支座上的销轴做圆周运动,从而调整旋耕刀的入土深度,同时两个刮平调整辅助液压缸推动弯梁绕旋耕机机架上的定位支座转动,调整刮土板入土深度,弥补耕深调整引起的刮土深度变化量;同时,单轴倾角传感器实时检测刮土板的水平度,将信号传递给控制系统,控制系统进行逻辑运算后对液压系统电磁阀发出指令驱动两个水平调整液压缸做相反的伸
缩运动,进而带动刮土板经轴承连接结构相对于刮土板支撑板转动,完成刮土板水平度的调整动作,实现土壤表面播种平整度要求。
14.本发明的有益效果:(1)该整地机通过单独设计的旋耕机悬挂机构和耕深调整装置调整旋耕深度,结构合理可靠,能够精准地控制旋耕深度;(2)该整地机将传统的固定式刮土板设计成旋耕机挡土罩和可调整角度的刮土板,利用刮平调整装置调整刮土板水平度,提高耕作地面平整度。
附图说明
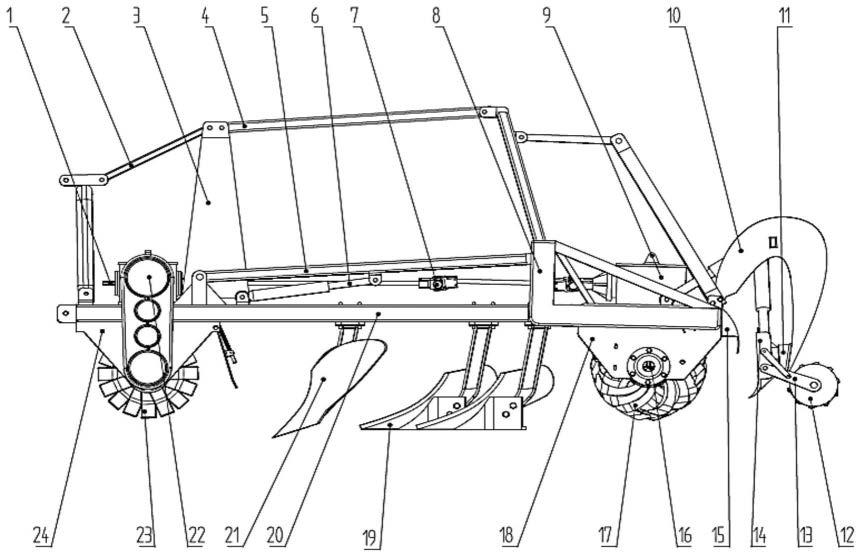
15.图1是本发明的结构正视图。
16.图2是本发明的结构轴测图。
17.图3是耕深调整下摆臂的结构轴测图。
18.图4是刮土板安装结构示意图。
19.图5是耕深检测原理图。
20.图6是耕深控制逻辑图。
21.图7是刮平控制逻辑图。
22.图中:1.破茬装置齿轮箱、2.前置悬挂连接杆、3.支撑板、4.耕深调整上摆臂、5.耕深调整下摆臂、6.耕深调整液压缸、7.万向节、8.旋耕机悬挂机构、9.旋耕机齿轮箱、10.弯梁、11.刮土板支撑板、12.镇压辊、13.镇压辊连接板、14.刮土板、15.旋耕机挡土罩、16.超声波传感器、17.旋耕刀、18.旋耕机机架、19.单翼铧式犁、20.主机架、21.交错式双翼开沟犁、22.破茬装置侧传动箱、23.破茬刀、24.破茬装置机架、25.单轴倾角传感器、26.刮土板水平调整液压缸、27.横梁支架、28.耕深调整下摆臂固定支座、29.前部传动轴、30.后部传动轴、31.刮平调整辅助液压缸、32.轴承连接结构、5-1.耕深调整下摆臂加强梁、8-1.悬挂侧连接板、8-2.悬挂横梁、8-3.悬挂横梁加强梁、8-4.悬挂三角支架、8-5.悬挂后拉杆、8-6.悬挂后拉杆连接杆。
具体实施方式
23.以下结合附图,通过实例对本发明作进一步说明。
24.参照图1、图2、图3、图4、图5、图6和图7,本发明的目的是设计一种自动调整的秸秆翻旋联合整地机,主要由破茬装置、秸秆翻埋装置、旋耕装置、耕深调整装置、刮土板(14)、刮平调整装置和镇压辊(12)构成。
25.破茬装置包括破茬装置齿轮箱(1)、破茬装置机架(24)、破茬装置侧传动箱(22)、破茬刀(23),所述破茬装置齿轮箱(1)固定于主机架(20)前端上侧,所述破茬装置机架(24)固定于主机架(20)前端下侧,所述破茬装置侧传动箱(22)固定于主机架(20)前端左侧,所述破茬刀(23)固定连接在破茬装置刀轴上,刀轴从破茬装置侧传动箱(22)获得动力,相对于破茬装置机架(24)做定轴转动。
26.秸秆翻埋装置包括交错式双翼开沟犁(21)和单翼铧式犁(19),所述交错式双翼开沟犁(21)位于破茬装置后部,固定在主机架(20)中间的支撑梁上 ,所述单翼铧式犁(19)位于交错式双翼开沟犁(21)后,在主机架(20)后部呈左右对称布置。
27.旋耕装置包括旋耕机机架(18)、旋耕机悬挂机构(8)、旋耕机齿轮箱(9)、旋耕刀(17)和旋耕机挡土罩(15),所述旋耕机机架(18)布置在主机架(20)尾部,焊接在旋耕机悬挂机构(8)上,所述旋耕机悬挂机构(8)上侧与耕深调整上摆臂(4)后部铰接,下侧与耕深调整下摆臂(5)后部铰接,旋耕机悬挂机构(8)中悬挂侧连接板(8-1)、悬挂横梁(8-2)、悬挂横梁加强梁(8-3)、悬挂三角支架(8-4)焊接在一起,悬挂后拉杆(8-5)通过螺栓固定在旋耕机机架(18)上,悬挂后拉杆连接杆(8-6)分别与悬挂三角支架(8-4)和悬挂后拉杆(8-5)铰接,所述旋耕机齿轮箱(9)固定在旋耕机机架(18)中上部,所述旋耕刀(17)固定连接在旋耕机刀轴上,刀轴从旋耕机齿轮箱(9)获得动力,相对于旋耕机机架(18)做定轴转动,所述旋耕机挡土罩(15)固定在旋耕机机架(18)尾部上侧。
28.耕深调整装置包括支撑板(3)、前置悬挂连接杆(2)、耕深调整上摆臂(4)、耕深调整下摆臂(5)、耕深调整下摆臂固定支座(28)、耕深调整液压缸(6)、超声波传感器(16),所述支撑板(3)位于破茬装置齿轮箱(1)后部,固定在主机架(20)上侧,所述前置悬挂连接杆(2)前侧与三点悬挂上连接点铰接、后侧与支撑板(3)铰接,所述耕深调整上摆臂(4)前部铰接在支撑板(3)上侧、后部铰接在悬挂三角支架(8-4)顶端,所述耕深调整下摆臂固定支座(28)焊接在主机架(20)上侧,所述耕深调整下摆臂(5)前部铰接在耕深调整下摆臂固定支座(28)上、后部铰接在旋耕机悬挂机构(8)上、并且中间设有加强梁(5-1),所述耕深调整液压缸(6)前部铰接在主机架(20)上、后部铰接在耕深调整下摆臂(5)上,所述超声波传感器(16)固定在旋耕机机架(18)两侧。
29.刮平调整装置包括弯梁(10)、刮土板支撑板(11)、单轴倾角传感器(25)、刮土板水平调整液压缸(26)、横梁支架(27)、刮平调整辅助液压缸(31)、轴承连接结构(32);所述弯梁(10)铰接在旋耕机机架(18)上,所述刮土板支撑板(11)焊接在弯梁(10)尾部内侧,所述单轴倾角传感器(25)固定在刮土板(14)中间,所述横梁支架(27)焊接在两弯梁(10)之间,所述刮平调整辅助液压缸(31)分别与横梁支架(27)和旋耕机机架(18)铰接,所述刮土板水平调整液压缸(26)分别与横梁支架(27)和刮土板(14)铰接。
30.所述刮土板(14)通过轴承连接结构(32)与刮土板支撑板(11)构成只可相对转动的连接。
31.所述镇压辊(12)通过镇压辊连接板(13)连接在刮土板(14)上。
32.工作原理:该联合整地机工作时与拖拉机的三点悬挂连接,由拖拉机提供动力,破茬装置齿轮箱(1)将拖拉机辅助动力输出轴的动力分为两部分,其中一部分通过破茬装置侧传动箱(22)驱动破茬刀轴转动,另一部分依次通过“万向节—前部传动轴(29)—万向节(7)—后部传动轴(30)—万向节”的顺序传至旋耕机齿轮箱(9)。在拖拉机的牵引下,首先破茬装置通过破茬刀(23)的旋转将残留秸秆等打碎,随后翻埋装置通过交错式双翼开沟犁(21)、单翼铧式犁(19)打破犁底层,并对打碎后的碎渣进行翻埋,然后旋耕装置带动旋耕刀(17)旋转打碎大块土壤,打碎后的土壤撞击旋耕机挡土罩(15)落到地面,最后通过刮土板(14)把地面刮平再用镇压辊(12)对土壤进行镇压。在工作的同时,超声波传感器(16)实时检测机架到地面的距离间接算出耕作深度,将信号传递给控制系统,控制系统进行逻辑运算后对液压系统电磁阀发出指令驱动两个耕深调整液压缸(6)和两个刮平调整辅助液压缸(31)做伸缩运动,两个耕深调整液压缸(6)推动耕深调整下摆臂(5)绕耕深调整下摆臂固定支座(28)做圆周运动,从而调整旋耕刀(17)的入土深度,同时两个刮平调整辅助液压缸
(31)推动弯梁(10)绕旋耕机机架上的定位支座转动,调整刮土板入土深度,弥补耕深调整引起的刮土深度变化量;同时,单轴倾角传感器(25)实时检测刮土板(14)的水平度,将信号传递给控制系统,控制系统进行逻辑运算后对液压系统电磁阀发出指令驱动两个水平调整液压缸(26)做相反的伸缩运动,进而带动刮土板(14)经轴承连接结构(32)相对于刮土板支撑板(11)转动,完成刮土板水平度的调整动作,实现土壤表面播种平整度要求。
33.本发明公开的一种自动调整的秸秆翻旋联合整地机,实现了旋耕深度的自动调整和耕作地面平整度的自动调整,该整地机结构可靠,自动化程度高,有效地提高了作业精度,有利于提高农作物产量,降低作业成本。
34.本具体实施案例仅是本发明的优选方式并非限制本发明,本技术领域的研究人员根据本发明所做的非创造性的改动均应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1