一种农机作业防伤人的方法和装置与流程
本发明涉及农用机械领域,具体为一种农机作业防伤人的方法和装置。
背景技术:
1、近年来,随着农业现代化的发展,农作物的收获效率显著提高,这得益于农业机械化水平的不断提高。大型农用联合收获机在提高作物收获效率方面发挥了重要作用,由于在作业时机手的视野容易受到高秆作物(高粱、玉米)的影响很难注意到处于作物中的人,农田中的农户也无法及时注意到收获机的位置,农机在收获作业时的事故频发。因此,如何提高农机作业的安全性是一个亟待解决的问题。
技术实现思路
1、本技术提供了一种农机作业防伤人的方法和装置,其能够在农机的一定距离范围内存在人体时发出提示,及时提醒机手注意控制农机,避免误伤人体,同时提醒农机周围人体注意及时避让农机,能够有效提高农机作业时的安全水平。
2、第一方面,提供了一种农机作业防伤人的方法,包括:
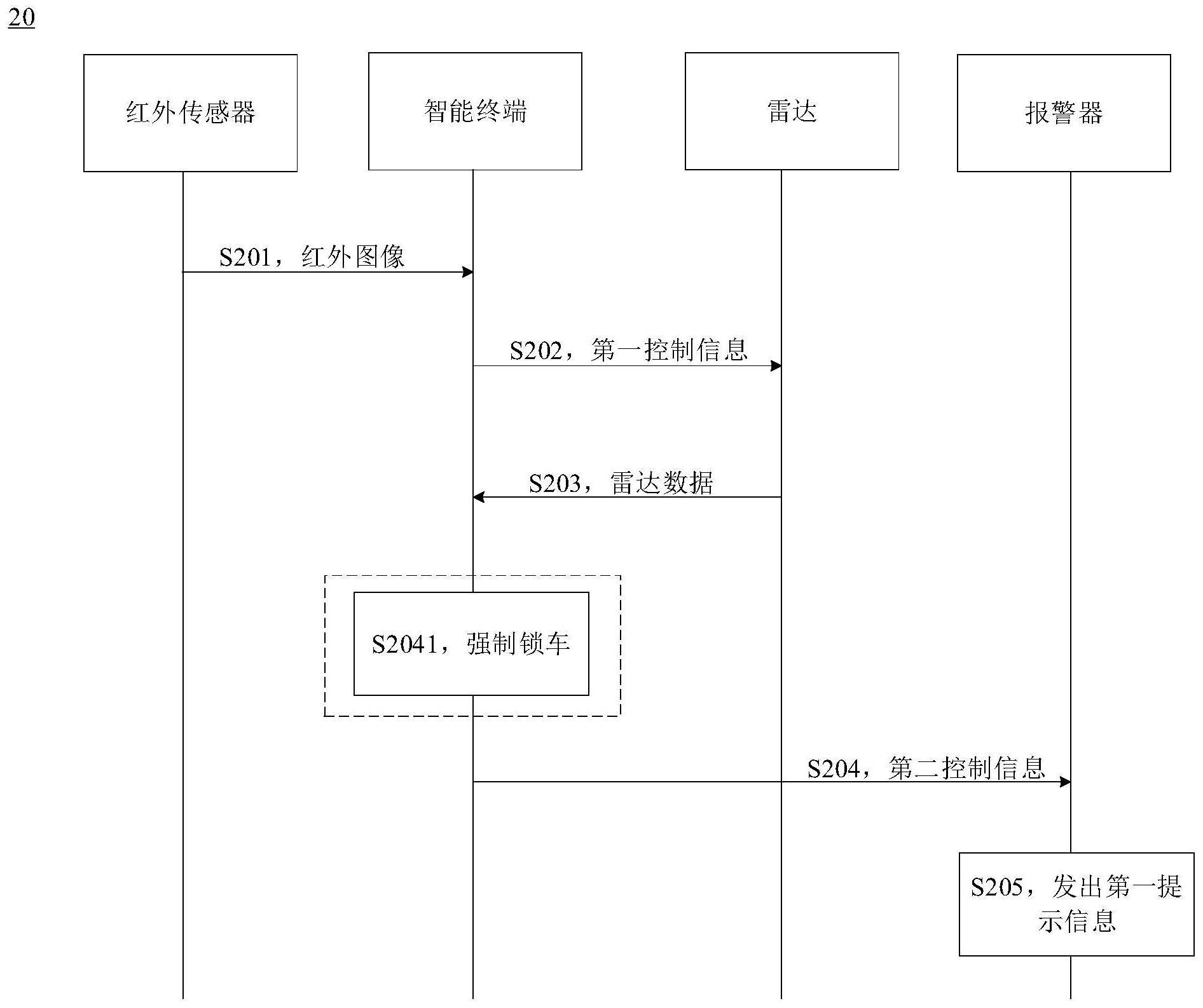
3、红外传感器向智能终端发送红外图像;智能终端根据该红外图像确定农机周围人体所在的第一区域,并向雷达发送第一控制信息,以指示雷达采集第一区域内的雷达数据;雷达根据第一控制信息向智能终端发送所采集的雷达数据;智能终端根据雷达数据确定第一区域内人体的位置信息,向报警器发送第二控制信息,其中,人体的位置信息包括人体相对于农机的方向和距离;报警器根据第二控制信息发出第一提示信息。
4、本技术实施例中,首先利用红外传感器确认农机一定距离范围内的人体的粗略位置(即上述第一区域),然后获取该粗略位置的雷达数据以进行针对性分析,从而能够准确、高效地判断人体的具体位置,再利用报警器进行安全提示,这样有效避免了农机发生误伤事件,提高农机作业的安全水平。
5、在一些可能的实施例中,智能终端内设置有针对高秆作物收获场景的雷达信号处理模型,该雷达信号处理模型由人体在密集高秆作物中活动时的秸秆形态雷达数据训练得到,并且用于确定第一区域内人体的位置信息。
6、雷达是基于电磁波的物理特性进行感知和处理的,可以在低光、雾霾、夜间等环境下工作,并且不受光线、颜色、纹理等因素的影响。雷达信号处理模型通过多层次的神经网络结构,能够学习到雷达数据中更高级、更复杂、更具有表征能力特征,并且针对不同角度、光照条件和噪声等情况具有较好的鲁棒性。因此,针对人体在高秆作物中活动时秸秆产生形态变化复杂的情况,通过雷达信号处理模型计算农机周围人体的位置信息,能够提高检测的准确性和鲁棒性,从而更有效地降低农机作业时的伤人风险。
7、在一些可能的实施例中,智能终端判断人体相对于农机的距离小于预设的安全距离,则智能终端执行强制锁车功能。
8、当农机作业时遇到人体,并且人体距离农机的距离小于预设的安全距离时,强制锁车功能可以实现快速反应和紧急停机,确保农机能够及时的反应,从而避免对人体造成伤害。
9、在一些可能的实施例中,农机作业防伤人的方法还包括:
10、惯性传感器(inertial measurement unit,imu)向智能终端发送imu检测信息,该imu检测信息包括农机的位姿信息;全球导航卫星系统(global navigation satellitesystem,gnss)向智能终端发送gnss检测信息,该gnss检测信息包括农机的位置、速度和时间信息;智能终端根据imu检测信息和gnss检测信息向报警器发送第三控制信息;报警器根据第三控制信息发出第二提示信息。
11、通过imu结合gnss来监测农机的位姿信息,当农机的位姿发生变化时,通过报警器进行安全提示,进一步降低了农机作业时的伤人风险,提高了农机作业时的安全性。
12、在一些可能的实施例中,报警器可以为声光报警器,报警器发出的第一提示信息包括人体的位置信息,报警器发出的第二提示信息包括农机的位姿信息。
13、在一些可能的实施例中,第一提示信息为语音信号和闪光信号,并且第一提示信息用于提醒机手和农机周围的人体注意农机与人体的相对位置。
14、在一些可能的实施例中,第二提示信息为语音信号和闪光信号,并且第二提示信息用于提醒农机周围的人体注意农机的位姿信息。
15、声光报警器通过声音和闪光引起农机周围人体和机手的注意,在收获高秆作物的场景下声光报警器中高音量的声音能够穿透噪音、闪光能够在光线较暗的环境中被注意到,增强了报警效果。
16、第二方面,提供了一种农机作业防伤人的装置,该装置包括:
17、红外传感器,用于向智能终端发送红外图像;智能终端,用于根据红外图像确定农机周围人体所在的第一区域,并向雷达发送第一控制信息,以指示雷达采集第一区域内的雷达数据;雷达,用于向智能终端发送雷达数据;上述智能终端还用于,根据雷达数据确定第一区域内人体的位置信息,并向报警器发送第二控制信息,其中,该位置信息包括人体相对于农机的方向和距离;报警器,用于根据第二控制信息发出第一提示信息。
18、在一些可能的实施例中,针对高秆作物收获场景的雷达信号处理模型,该雷达信号处理模型由人体在密集高秆作物中活动时的秸秆形态的雷达数据训练得到,并且用于确定第一区域内人体的位置信息。
19、在一些可能的实施例中,智能终端用于,根据上述位置信息,判断人体相对于农机的距离小于预设的安全距离,则智能终端执行强制锁车功能。
20、在一些可能的实施例中,农机作业防伤人的装置还包括:
21、imu,用于向智能终端发送imu检测信息,该imu检测信息包括农机的位姿信息;gnss,向智能终端发送gnss检测信息,该gnss检测信息包括农机的位置、速度和时间信息;上述智能终端还用于,根据imu检测信息和gnss检测信息向报警器发送第三控制信息;上述报警器还用于,根据第三控制信息发出第二提示信息。
22、在一些可能的实施例中,报警器可以为声光报警器,报警器发出的第一提示信息包括人体的位置信息,报警器发出的第二提示信息包括农机的位姿信息。
23、在一些可能的实施例中,第一提示信息为语音信号和闪光信号,并且第一提示信息用于提醒机手和农机周围的人体注意农机与人体的相对位置。
24、在一些可能的实施例中,第二提示信息为语音信号和闪光信号,并且第二提示信息用于提醒农机周围的人体注意农机的位姿信息。
25、第三方面,提供了一种农机,包括第二方面及其实施方式中的装置。
26、第四方面,提供了一种芯片系统,包括存储器和处理器,该存储器用于存储计算机程序,该处理器用于从存储器中调用并运行该计算机程序,使得安装有该芯片系统的农机作业防伤人的装置执行上述第一方面及其实施方式中的方法。
27、第五方面,提供了一种计算机程序产品,该计算机程序产品包括:计算机程序代码,当该计算机程序代码被运行时,使得农机作业防伤人的装置执行上述第一方面及其实施方式中的方法。
28、第六方面,提供了一种计算机可读存储介质,该计算机可读存储介质存储有程序,该程序使得农机作业防伤人的装置执行上述第一方面及其实施方式中的方法。
29、上述技术方案,首先利用红外传感器确认农机一定距离范围内的人体的粗略位置,然后获取该粗略位置的雷达数据以进行针对性分析,从而能够准确、高效地判断人体的具体位置,再利用报警器提示机手注意控制农机,同时提示农机周围的人体避开农机,这样有效降低了农机作业时的误伤人风险,提高了农机作业的安全性。此外,还通过imu结合gnss来监测农机的位姿信息,当农机位姿发生变化时,通过报警器提示人体注意农机的方向位置发生变化,对农机进行避让,进一步提高了农机作业的安全性。
- 还没有人留言评论。精彩留言会获得点赞!