家禽转移机构的制作方法
家禽转移机构
1.本发明涉及家禽转移机构,该家禽转移机构用于将家禽身体从第一家禽运输线转移到第二家禽运输线。此外,本发明涉及家禽运输系统,该家禽运输系统包括家禽转移机构、第一家禽运输线和第二家禽运输线。另外,本发明还涉及用于将至少一个家禽身体从第一家禽运输线自动转移到第二家禽运输线的方法。
2.wo2006/080834a1公开了用于例如两条输送线之间的转移设备。转移设备包括多个承载件,每个承载件适于承载屠宰后的家禽产品的腿部,即在每个承载件中,两个腿部可以被悬挂在开口中以将屠宰后的家禽产品从第一家禽运输线转移到第二运输线。每个承载件中的开口之间的距离是固定的。此外,每个承载件包括能够在导轨上移动的单元。承载件可以通过与每个承载件相关联的联接装置联接到驱动构件,该驱动构件用于使承载件在导轨上移动。承载件和驱动构件之间的联接装置可以借助于断开联接装置断开联接。在这种已知的转移设备中,家禽的输送可以被控制到承载件可以在期望时选择性地与驱动构件断开联接的程度。
3.本发明的目的是提供改进的家禽转移机构。
4.目的通过权利要求1中所限定的家禽转移机构来实现。
5.家禽转移机构将家禽身体从第一家禽运输线自动转移到第二家禽运输线。家禽转移机构包括至少一个轨道和能够沿轨道移动的穿梭件。穿梭件包括承载件,并且每个承载件配置成承载家禽身体的一个腿部,使得待转移的家禽身体能够由成对的承载件承载。换句话说,每个承载件配置成仅承载一个家禽身体的两个腿部中的单个腿部。因此,在使用家禽转移机构时,一个家禽身体由两个承载件承载。在家禽转移机构中,可以改进家禽身体从第一运输线到家禽转移机构的转移和/或家禽身体从家禽转移机构到第二运输线的转移,因为家禽转移机构配置成更改成对的承载件中的承载件之间的距离以更改家禽身体的腿部之间的距离。因此,家禽转移机构可以被有利地实行在每个家禽身体的两个腿部之间的间距(距离)或间距范围不同的两条运输线之间。运输线之间的间距可以例如由于将在每条运输线中的家禽身体上实施的加工步骤不同而更改。本文中的运输线可以是不止用于运输家禽身体的线,例如,运输线还可以配置成加工家禽身体或配置成使得运输线能够在家禽身体上实施至少一个、优选地不同、加工步骤。总体来说,家禽加工工厂包括多条运输线,其中,不是不可能的是,第一运输线由与第二运输线不同的制造商制造,并且第一运输线中的单个家禽身体的腿部之间的间距(距离)大于或小于第二运输线中的单个家禽身体的腿部之间的间距(距离)。通过使用配置成更改成对的承载件中的承载件之间的距离以更改单个家禽身体的腿部之间的距离的家禽转移机构,可以在家禽加工工厂中连接这些具有不同间距的运输线,而无需附加构造性措施。
6.另外,家禽转移机构能够提供改进的并且更灵活的转移,因为通过将成对的承载件中的至少一个承载件移动到对于由第一运输线运输的家禽身体的腿部或将由第二运输线运输的家禽身体的腿部而言的最佳位置,可以显著减少导致家禽身体掉落或导致仅通过一个腿部承载家禽身体的不正确转移的数量。另外,可以以更好的方式控制家禽身体在运输线和转移机构之间的转移以减少转移期间的错误对准,使得可以减少转移期间对家禽身
体的损坏。由于不正确转移而造成的、对于家禽身体的损坏可能是可见的,诸如家禽身体的腿部被扭曲或家禽身体的肉中存在切口。从商业角度来看,这种损坏是不期望的。在使用家禽转移机构期间,承载件的最佳位置可以通过例如使用控制系统/控制单元来确定,该控制系统/控制单元基于、例如从传感器单元、接收的输入将承载件之间的距离设置为期望的距离。此外,在第一运输线和第二运输线之间进行转移期间,可以通过在预定距离内更改家禽身体的腿部之间的距离来更改承载件之间的距离。这种操作/步骤所需的力可以例如借助于与控制系统/控制单元通信的传感器与控制系统/控制单元通信。在控制系统/控制单元中,实际力值与预定值或预定力值范围进行比较。这些预定值或预定力值范围例如存储在控制系统/控制单元的存储器中或能够由控制系统/控制单元经由通信线路进行访问。将利用转移机构进行转移的每种类型的家禽身体可以具有其自身的用于与实际值进行比较的预定力值或预定力值范围。如果实际力值与预定值或预定值范围之间的差值超过阈值,则控制系统/控制器可以指示转移机构释放家禽身体,而不是将家禽身体转移到第二运输线。转移机构还可以配置成将家禽身体转移到另外的线或转移到检查线以进行进一步检查。换句话说,转移机构可以配置成将用于借助于承载件更改家禽身体的腿部之间的距离的力用作被转移机构转移的家禽身体的品质的指示。这种品质检验可以是在将家禽身体从第一运输线移动到第二运输线期间的转移机构中的单独步骤,即处于在借助于承载件更改腿部之间的距离以对应于第二运输线中的腿部之间的距离之前的步骤中。然而,还可能的是,在更改腿部之间的距离以对应于第二运输线中的腿部之间的距离的步骤期间执行上述品质检验。
7.此外,家禽转移机构还可以在转移期间借助于承载件更改家禽身体承载件的腿部之间的距离,以在将距离调整到用于将家禽身体转移到第二运输线的转移距离之前通过增加和减小腿部之间的距离来伸展/拉伸和缩短/挤压家禽身体。在转移期间,距离可以增加和减少预定次数。这种操作可以被视作由家禽转移机构执行的、家禽身体的加工步骤,因为在转移期间家禽身体变得更加柔韧,这可以促进转移机构和第二运输线之间的转移和/或可以促进、例如在第二运输线中的转移之后、将在家禽身体上实施的一个或多个进一步加工步骤。如果从第一运输线接纳的家禽身体、例如由于家禽身体的温度相对较低而、相对较硬,则可以使用家禽身体的这种加工步骤。
8.在本文中,家禽身体是指包括至少两个腿部的屠宰产品的屠体,即,家禽身体可以具有翅膀、颈部、胸部(chess)、头部和/或其他部分,但还可能的是,家禽身体由仅具有两个腿部的屠体组成。
9.在一个方面中,家禽转移机构的每个穿梭件具有成对的承载件中的一个承载件,使得成对的穿梭件包括用于承载家禽身体的成对的承载件,其中,家禽转移机构配置成更改每对穿梭件中的第一穿梭件的承载件和第二穿梭件的承载件之间的距离。
10.以这种方式,提供了灵活的转移机构,因为将沿轨道或在轨道上移动的每个穿梭件具有用于承载待转移的家禽身体的单个腿部的单个承载件。通过为每个穿梭件提供用于仅承载家禽身体的一个腿部的单个承载件,可以获得用于更改家禽身体的腿部之间的距离的、相对简单且坚固的构造。为了更改两个承载件之间的距离,可能的是,每对穿梭件中的仅一个穿梭件配置成沿轨道相对于该对穿梭件中的第二穿梭件独立移动。例如,在轨道上转移家禽身体的每对穿梭件中的至少一个穿梭件包括用于使相应穿梭件沿轨道移动的驱
动器,其中,为了更改距离,成对的穿梭件中的这一穿梭件可以通过驱动器相对于成对的穿梭件中的另一个穿梭件独立移动。驱动器可以由家禽转移机构的控制系统/控制单元控制。驱动器可以是致动器,其中,如上所述,将用于更改家禽身体的腿部之间的距离的力可以被用作由家禽转移机构转移的家禽身体的品质的指示。
11.还可能的是,可以独立地控制具有用于承载家禽身体的一个腿部的单个承载件的每个穿梭件,使得每个穿梭件可以在轨道上独立移动。轨道可以包括长定子线性马达,其中,每个穿梭件包括至少一个磁体,诸如电磁体或永磁体。这种设置为长定子线性马达的轨道使得可以制造需要最少维护的相对坚固的穿梭件,因为穿梭件仅需要磁体以沿轨道独立移动。通过使用设置为轨道的长定子线性马达,可以以精确的方式并且以相对成本友好的方式沿轨道独立驱动设置有磁体的每个穿梭件。长定子线性马达轨道和包括磁体的穿梭件还具有以下优点:与诸如例如wo2006/080834中公开的转移设备的传统驱动器相比,在使用家禽转移机构时产生的声音显著降低。
12.在另外的方面中,每对承载件包括可移位地安装在穿梭件中的一个穿梭件上的至少一个承载件。在这种家禽转移机构中,每个穿梭件还可以包括用于承载单个家禽身体的腿部的两个承载件,其中,穿梭件的两个承载件中的至少一个承载件可移位地安装在穿梭件上。还可能的是,每个穿梭件具有单个承载件,其中,用于承载一个家禽身体的两个穿梭件之间的距离可以在使用家禽转移机构时保持恒定,并且可以通过至少一个承载件更改两个承载件之间的距离,该至少一个承载件可移位地安装在承载家禽身体的每对穿梭件中的至少一个穿梭件上。
13.还可能的是,每对承载件包括可旋转地安装在穿梭件中的一个穿梭件上的至少一个承载件。以这种方式,例如可以在转移期间借助于家禽转移机构改变家禽身体的取向和/或改变至少一个承载件的取向以优化转移机构和运输线中的一条运输线之间的成功转移。在转移期间,家禽身体还可以在预定旋转角度内来回旋转以通过测量和比较用于旋转至少一个腿部的力来执行品质检验和/或执行作为家禽身体的加工步骤的品质检验以使得家禽身体更加柔韧,例如以促进向第二运输线的转移和/或促进将在家禽身体上实施的后续加工步骤。还可能的是,结合腿部中的至少一个腿部的旋转与如上文所讨论的、腿部之间的距离的更改,以借助于转移机构提供更精确的品质检验和/或提供柔韧的家禽身体。
14.此外,可以通过增加和/或移除家禽转移机构中的穿梭件容易地调整家禽转移机构的载量,其中,穿梭件可以可拆卸地、优选地手动可拆卸地、连接到轨道。因此,操作员可以容易地调整家禽转移机构中的穿梭件的数量。
15.用于包括承载件的穿梭件的轨道可以是环形轨道。
16.另一目的在于提供改进的家禽运输系统。这样的家禽运输系统由权利要求14提供。这种家禽运输系统包括如本文中公开的家禽转移机构、第一家禽运输线和第二家禽运输线,其中,家禽转移机构配置成将至少一个家禽身体从第一家禽运输线转移到第二家禽运输线,其中,在第一家禽运输线中,家禽身体的腿部之间的距离与第二家禽运输线中的家禽身体的腿部之间的距离不同。
17.另外,目的在于提供用于将至少一个家禽身体从第一家禽运输线自动转移到第二家禽运输线的改进的方法。这种方法由权利要求15提供。
18.在方法中,家禽身体借助于能够沿轨道移动的穿梭件从第一家禽运输线自动转移
到第二家禽运输线,其中,借助于穿梭件的承载件通过家禽身体中的至少一个家禽身体的腿部承载家禽身体中的至少一个家禽身体,其中,更改承载家禽身体的承载件之间的距离以更改家禽身体的腿部之间的距离。借助于方法,可以在从第一运输线转移到第二运输线期间调整一个单个家禽身体的腿部之间的间距,例如以促进转移机构和第二运输线之间的转移。例如,可能的是,在第一家禽运输线中,被运输的家禽身体的腿部之间的距离(间距)与第二家禽运输线中的被运输的家禽身体的腿部之间的距离不同。用于承载家禽身体的每个腿部的承载件之间的距离可以在任何给定时刻被更改。在转移期间,家禽身体的腿部之间的距离可以借助于穿梭件的承载件变得更长或更短。家禽身体上的这种加工步骤提供了对于向第二运输线的转移和/或将在家禽身体上实施的后续加工步骤而言更加柔韧的家禽身体。这种步骤还可以在转移期间在转移机构中重复多次。
19.在方法的一个方面中,使第一穿梭件的移动速度相对于第二穿梭件的移动速度发生更改,该第一穿梭件包括用于承载家禽身体的腿部的第一承载件,第二穿梭件包括用于承载家禽身体的另一个腿部的第二承载件。这些速度差异可以用于更改被转移的家禽身体的腿部之间的距离和/或可以用于促进成功转移。
20.在一个另外的方面中,承载家禽身体的腿部的承载件中的至少一个承载件可以相对于该承载件的穿梭件旋转。以这种方式,可以改变由承载件承载的家禽身体的取向,例如以将取向调整到适应将在第二家禽运输线中施行的期望的操作。此外,可以相对于穿梭件旋转承载件以改变至少一个承载件的取向以优化转移机构和运输线中的一条运输线之间的成功转移。
21.下文将参考示出示例性实施例的随附附图更详细地解释本发明,在随附附图中:
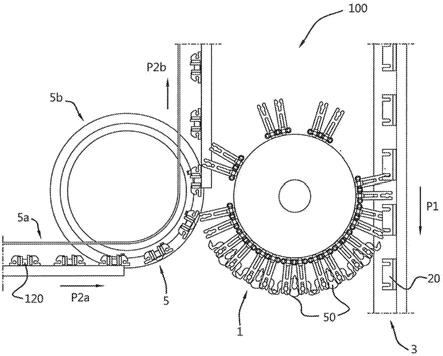
22.图1是家禽运输系统的图解俯视图;
23.图2是在第一运输线和家禽转移机构之间进行转移的立体图;
24.图3是第二运输线的一区段中的锁扣的俯视图;
25.图4是家禽转移机构的图解立体俯视图;
26.图5是附接到家禽转移机构的两个穿梭件的用于承载家禽身体的两个承载件的俯视图;
27.图6a至图6d示出了在家禽转移机构和第二运输线之间转移家禽身体的不同示意性俯视图。
28.在以下描述中,完全相同或对应的部分具有完全相同或对应的附图标记。参考具体附图公开的每个特征还可以与本公开内容中公开的另外的特征结合,除非这些特征不兼容对于本领域技术人员是显而易见的。
29.图1示出了家禽运输机构100的图解俯视图,该家禽运输机构100包括家禽转移机构1、第一运输线3和第二运输线5,该第一运输线3具有由箭头p1指示的运输方向,第二运输线5具有由箭头p2a指示的朝向家禽转移机构1的针对空的锁扣的第一运输方向和由箭头p2b指示的离开家禽转移机构1的第二运输方向。从上方观察,由箭头p2a和p2b指示的运输方向之间的角度大约为90度。在第一运输线3和第二运输线5中使用锁扣20(图2);120(图3)以承载家禽身体50的腿部。每个锁扣20;120具有用于单个家禽身体50的两个腿部的两个开口20a、20b;120a、120b并且可选地具有夹持装置以将家禽身体的腿部夹持在开口20a、20b;120a、120b中。每个锁扣20;120中的两个开口20a、20b;120a、120b之间的距离(间距)是固定
的,即,例如第一运输线3中的每个锁扣20中的开口20a、20b之间的距离为15cm,其中,第二运输线5中的每个锁扣120中的开口120a、120b之间的距离为20cm。第二运输线5具有用于打开和旋转锁扣120的锁扣打开机构5a和用于使锁扣120相对于家禽转移机构1定位的定位轮5b。图3示出了锁扣120和定位轮5b的一部分。
30.家禽身体50由第一运输线3朝向家禽转移机构1输送。如图2中示出的,家禽身体50正在借助于推动器单元60从第一运输线3的锁扣20朝向家禽转移机构1的承载件11a、11b转移。
31.图4和图5示出了家禽转移机构1的细节。用于将家禽身体从第一家禽运输线3转移到第二家禽运输线5的家禽转移机构1包括至少一个轨道、即环形轨道15、和能够沿轨道15移动的穿梭件13、13’。每个穿梭件13、13’包括为穿梭件13、13’提供附加支撑的轮18和支承件(未示出)。穿梭件13、13’包括承载件11a、11b,并且如图5中详细示出的,每个承载件11a、11b配置成承载家禽身体50的一个腿部50a、50b,使得待转移的家禽身体50能够通过成对的承载件11a、11b被承载。家禽转移机构1配置成更改成对的承载件中的承载件11a、11b之间的距离以更改家禽身体50的腿部50a、50b之间的距离d(图5)。
32.在附图中示出的家禽转移机构1的示例中,每个穿梭件13、13’具有其自身的承载件11a、11b以在开口12a、12b中仅承载家禽身体的一个腿部。每个穿梭件13、13’可以借助于控制单元(未示出)被独立控制以控制每对承载件11a、11b中的承载件11a、11b之间的距离,使得每个穿梭件13、13’可以以精确的方式在轨道15上独立移动。轨道15是长定子线性马达,其中,每个穿梭件13、13’包括至少一个磁体(未示出),诸如电磁体或永磁体。这种轨道15使得可以制造需要最少维护的相对坚固的穿梭件,因为穿梭件13、13’仅需要一磁体以沿轨道独立移动。在沿轨道15移动期间,成对的穿梭件13、13’中的两个承载件11a、11b之间的距离d可以通过改变穿梭件13、13’之间的速度而更改。如在图1和图4中示出的,家禽转移机构1包括相对大量的穿梭件,该相对大量的穿梭件形成成对的穿梭件、如穿梭件13、13’、以承载单个家禽身体50。因此,为了沿家禽转移机构1的轨道15运输单个家禽身体,需要两个穿梭件13、13’,并且承载件11a、11b附接至每个穿梭件13、13’以仅承载家禽身体50的一个腿部。
33.如上文所述,第一运输线3具有锁扣20,该锁扣20在开口20a、20b之间的距离(间距)与第二运输线5的锁扣120的不同。因此,通过如上文所解释地使用转移机构1,可以在从第一运输线3转移到第二运输线5期间改变家禽身体50的腿部50a、50b之间的距离d。在图2中示出的转移步骤期间,腿部被定位在具有腿部之间的距离为d1(在图2中未示出)的承载件中,其中,在借助于家禽转移机构1进行转移期间,距离d1被调节、更具体地增加、到距离d2(图3)以将家禽身体50转移到第二运输线5的锁扣120。
34.关于是否将家禽身体50从第一运输线3转移到转移机构1的转移操作可以、例如基于家禽身体50的品质和/或重量、进行选择。此外,转移机构1配置成在转移期间执行品质控制。品质控制可以在转移期间通过测量在预定距离内更改腿部之间的距离所需的力来执行。在控制系统/控制单元中,所测量的实际力可以与预定力或预定力范围进行比较。如果实际力值与预定值或预定值范围之间的差值超过阈值,则控制系统/控制器可以指示转移机构释放家禽身体,而不是将家禽身体转移到第二运输线。长定子线性马达的附加优点在于,这种马达为控制系统/控制单元提供用于更改腿部之间的距离的精确的力值,而不需要
任何附加传感器或其他结构性修改。此外,转移机构1配置成在转移期间执行加工步骤,因为在转移期间可以增加和减小家禽身体的腿部之间的距离以拉伸和挤压家禽身体,例如拉伸和挤压家禽身体预定次数。因此,家禽身体在转移机构中变得更加柔韧,这可以有利于转移或在将在家禽身体上执行的任何后续加工步骤中可以是有利的。
35.在在家禽转移机构1中进行转移期间,如图1中所示出的,家禽身体50可以、例如由于运输线3、5之间的速度差而、被缓冲。优点在于,穿梭件13、13’可以在轨道15上被独立控制,使得转移机构1不需要特殊的构造性措施来缓冲转移机构1中的家禽身体。
36.轨道15可以被划分成不同的区段,例如第一运输线3附近的装载轨道区段、第二运输线5附近的卸载轨道区段以及装载轨道区段和卸载轨道区段之间的至少一个中间轨道区段。在中间轨道区段和/或装载轨道区段中,用于承载家禽身体的每对承载件中的承载件之间的距离可以保持恒定。如下文将相对于图6a至图6d所解释的,在卸载轨道区段中,家禽转移机构可以配置成使每对穿梭件13、13’中的第一穿梭件13的沿轨道的移动速度相对于每对穿梭件13、13’中的第二穿梭件13’的移动速度发生更改。这些速度差可以用于更改被转移的家禽身体50的腿部50a、50b之间的距离并且可以用于促进、改进和加速成功转移。
37.图6a至图6d示出了在转移机构1的卸载轨道区段中家禽身体从家禽转移机构1到第二运输线5、特别是到锁扣120、的转移和第二运输线5的用于使锁扣120相对于家禽转移机构1定位的定位轮5b。在图6a中,锁扣120和承载件11a、11b、11a’、11b’朝向彼此移动。在图6b中,附接到承载件11a的穿梭件(未示出)使家禽身体的一个腿部移动到锁扣120的开口120a的前方。通过相对于附接到承载件11b的穿梭件的移动速度增加附接到承载件11a的穿梭件的移动速度,已经在图6a和图6b中描绘的状况之间增加了家禽身体50的支撑在承载件11a、11b中的腿部50a、50b之间的距离。在图6c中,示出了腿部50a被定位在锁扣120的开口120a中。此外,示出了通过减慢第二承载件11b或甚至使第二承载件11b停止进一步增加了承载件11a、11b之间的距离,使得锁扣120能够经过第二承载件11b。接下来,如图6d中所示出的,第二承载件11b加速以追上锁扣120并且将家禽身体的腿部50b推入锁扣120的开口120b。接下来,锁扣120将闭合以借助于第二运输线5在由图1中的箭头p2b所示的方向上运输家禽身体。图6d还示出了相对于新的锁扣120’处于如图6b中解释的位置的新的成对的承载件11a’、11b’。
38.利用承载件11a、11b之间的变化距离的转移显著减少了不正确转移的数量。不正确转移可能导致在第二运输线5中家禽身体仅通过一个腿部被承载。后者是不期望的,因为接下来需要用于卸载第二运输线5中的这种被不正确承载的家禽身体的附加动作/构造性措施。
39.通过使承载件11a、11b相对于彼此移动,即,通过更改承载件11a、11b之间的距离,还可以优化承载件11a、11b的接纳位置,以在第一运输线3和运输机构1之间转移家禽身体。
40.穿梭件13、13’手动可拆卸地连接到轨道15,使得操作者可以容易地调整家禽转移机构1中的穿梭件的数量。
41.还可能的是,每对承载件包括可移位地安装在穿梭件中的一个穿梭件上的至少一个承载件(未示出),并且/或者每对承载件包括可旋转地安装在穿梭件中的一个穿梭件上的至少一个承载件(未示出)。
42.另外,每对穿梭件中的第一穿梭件可以配置成借助于穿梭件中的驱动器(未示出)
沿轨道相对于每对穿梭件中的第二穿梭件独立移动,该穿梭件中的驱动器用于使穿梭件独立于每对穿梭件中的另一个穿梭件沿轨道移动。驱动器可以无线连接到控制系统/控制单元。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1