一种基于机器视觉的锯鱼头装置与方法
本发明涉及鱼类加工,具体而言,尤其涉及一种基于机器视觉的锯鱼头装置与方法。
背景技术:
1、一般在鱼类的加工过程中,鱼头和鱼尾的去除是鱼前处理的关键步骤。
2、目前鱼头切割大都是人工切割或切鱼头设备切割,人工切割方式会使人手离切割装置较近,不仅劳动强度大且存在较大的安全隐患;采用切鱼头设备大都是统一位置切割,存在体积较大鱼的欠切割导致部分鱼头没被切割掉,使得鱼鳃杂质遗留,或对体积较小的鱼过切割,导致鱼身部分被切除,导致鱼肉浪费。
技术实现思路
1、根据上述提出现有鱼头切割方式存在安全隐患且切割浪费的技术问题,提供一种基于机器视觉的锯鱼头装置与方法。本发明主要通过提供一种基于机器视觉的全自动精准切除鱼头装置和方法,不仅能够消除安全隐患,而且能够进行高精度的切割以防止欠切割导致鱼肉混入鱼鳃杂质或过切割导致鱼肉浪费。
2、本发明采用的技术手段如下:
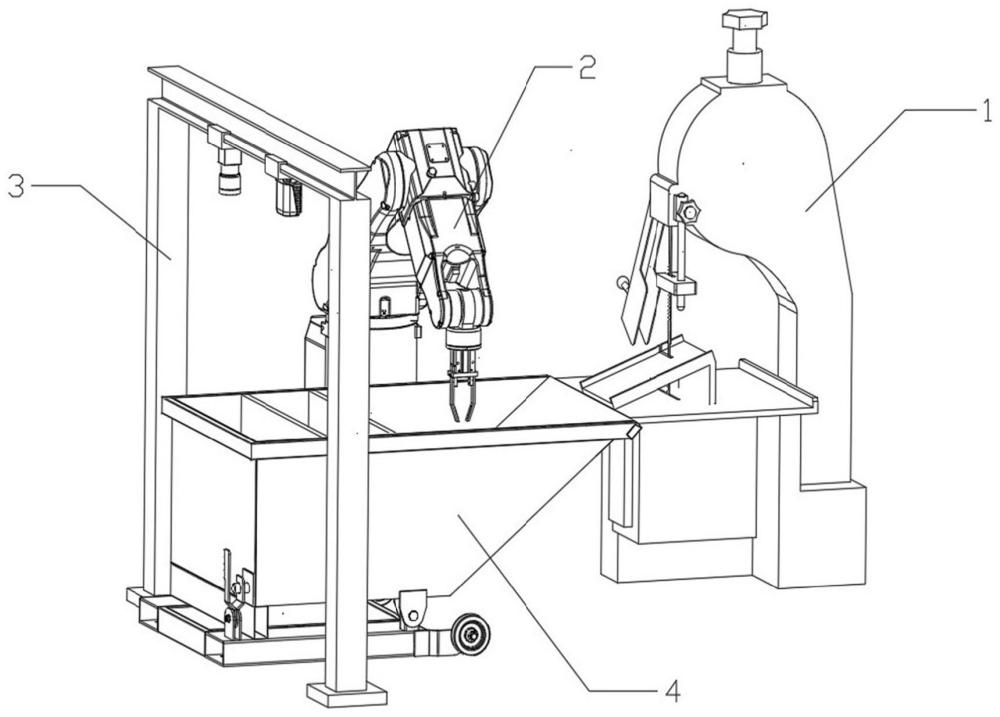
3、一种基于机器视觉的锯鱼头装置,包括带锯机、六轴机械臂、龙门架和鱼箱,所述鱼箱内放置有待切割的鱼,所述鱼箱侧面设置有六轴机械臂,所述鱼箱上方设置有3d工业相机和2d工业相机,所述3d工业相机和2d工业相机设置于龙门架上,所述鱼箱后部设置有带锯机;
4、所述3d工业相机识别鱼箱最上部的鱼,并将位置和角度信息传送给六轴机械臂,六轴机械臂对最上部的鱼进行抓取;所述2d工业相机识别鱼头和鱼身的连接处曲线并转换成切割轨迹传至六轴机械臂;所述六轴机械臂将鱼送到带锯机处,按切割轨迹切掉鱼头。
5、进一步地,所述鱼箱包括依次设置的鱼头箱、鱼身箱和整鱼箱,所述鱼头箱与带锯机的切割台相接触,所述切割台上设置有向鱼头箱倾斜的鱼头滑道,所述鱼头滑道上设置有放置锯条的狭缝,所述锯条的一侧设置有锯条防护罩,所述锯条防护罩上设置有把手,所述锯条的另一侧设置有限位块,所述限位块上开有可供锯条穿过的狭缝。
6、进一步地,所述鱼箱设置于安装有两轮的搭载架上,所述搭载架的前部通过锁紧装置与鱼箱相连,所述搭载架的中部通过固定支撑与鱼箱相连。
7、进一步地,所述锁紧装置包括两个夹板,所述夹板设置于搭载架上,两个夹板间设置有旋转把手和卡紧片,所述卡紧片的缺口与中心轴相接触,所述中心轴设置于鱼箱前部。
8、本发明还提供了一种基于机器视觉的锯鱼头方法,基于上述任意一项基于机器视觉的锯鱼头装置实现,包括如下步骤:
9、s1、通过3d工业相机获取鱼箱内叠放鱼的点云数据并进行分析,从而确定最优抓取目标,并将鱼的位置和位姿参数传送至六轴机械臂,引导六轴机械臂抓取整鱼;
10、s2、2d工业相机对s1抓取的整鱼的鱼头进行识别并规划切割路径,将切割线和切割路径的坐标信息均上传至pc端,pc端将切割路径坐标信息发送至六轴机械臂;
11、s3、所述六轴机械臂带动机械手抓取整鱼到锯条的位置,根据s2规划的切割路径坐标信息移动,进行锯鱼操作;
12、s4、操作完成后,鱼身被机械手放入鱼身箱中,鱼头顺着滑道滑落到鱼头箱中;
13、s5、依次对鱼箱内所有鱼执行s1-s4,直至鱼箱内所有鱼切割完毕。
14、进一步地,s1具体步骤如下:
15、s11、通过3d工业相机获取整鱼点云数据,利用直通滤波与均匀下采样算法对点云数据进行预处理以减少计算量,得到预处理后的整鱼点云;
16、s12、使用聚类分割算法对预处理后的整鱼点云进行实例分割,过滤因遮挡而变得残缺的鱼身点云;
17、s13、针对s12处理后的鱼身点云,结合每个鱼身点云的空间特征信息,按公式计算得分,取得分高的为优先抓取目标;
18、
19、其中,d表示鱼身点云质心到3d工业相机坐标系原点的距离,θ为垂直于鱼身点云法向量与相机坐标系z轴的夹角,ε是一个较小的数,用于降低当θ很小时导致权重过大,且防止出现除0错误;ω1和ω2为权重系数;
20、s15、计算最优目标鱼身的位置和位姿参数;
21、s16、将最优目标鱼身的位置坐标、姿态参数传输给机器人控制器,引导六轴机械臂抓取鱼身目标。
22、进一步地,s2具体步骤如下:
23、s21、计算图像坐标与机器人坐标之间的转换关系,使用标定板建立图像坐标与机器人坐标之间的转换关系,手动获取机器人坐标系下的示教点,相机采集图像获取所述示教点对应的图像坐标,计算从图像坐标到机器人坐标之间的转换矩阵m;
24、s22、进行鱼头切割区域网络训练,得到训练后网络;
25、s23、用六轴机械臂抓取整鱼送2d相机进行拍摄,并用s22训练后网络对鱼头的切割区域进行识别,提取鱼头边缘线,并对坐标进行精减后形成切割路径,通过标定的转换矩阵m转成机器人运动轨迹传送给六轴机械臂进行切割。
26、进一步地,s22的具体步骤如下:
27、s221、准备若干张整鱼图像样本,并标注出鱼头边缘区域,处理完成后导出jpg文件和json文件两种格式的文件;
28、s222、用pycharm中的程序将标注完成后的json文件转换成实例分割所需要的txt文件;
29、s223、将txt文件分为训练集70%,验证集30%,训练集和验证集中分别加入图片目录和标签目录,jpg文件放入到图片目录中,txt文件放入到标签目录中;
30、s224、将整个数据集放入pycharm的yolo算法中,利用yolo-v8 seg实例分割算法对训练集进行训练,根据目标物体的类别和边框信息,将分割结果中属于鱼头切割区域的部分筛选出来,通过不断优化结构得到优化的训练模型;
31、s225、用测试集图像进行测试模型效果,得到训练后网络。
32、较现有技术相比,本发明具有以下优点:
33、相对于常用在固定位置切割鱼头的方式,本发明能自动识别鱼头边界按弧线精准切割,能够防止欠切割导致鱼肉混入鱼鳃杂质或过切割导致鱼肉浪费。
34、采用机械手自动抓鱼并自动完成整个切割过程,极大的减少了人力的投入,且安全方便。
35、滑道装置可以使鱼直接滑入鱼头箱中,且方便拆卸清理,鱼箱可方便实现鱼身和鱼头的处理,有效减少劳动强度。
技术特征:
1.一种基于机器视觉的锯鱼头装置,其特征在于:包括带锯机(1)、六轴机械臂(2)、龙门架(3)和鱼箱(4),所述鱼箱(4)内放置有待切割的鱼,所述鱼箱(4)侧面设置有六轴机械臂(2),所述鱼箱(4)上方设置有3d工业相机(32)和2d工业相机(31),所述3d工业相机(32)和2d工业相机(31)设置于龙门架(3)上,所述鱼箱(4)后部设置有带锯机(1);
2.根据权利要求1所述的基于机器视觉的锯鱼头装置,其特征在于,所述鱼箱(4)包括依次设置的鱼头箱(43)、鱼身箱(42)和整鱼箱(41),所述鱼头箱(43)与带锯机(1)的切割台(15)相接触,所述切割台(15)上设置有向鱼头箱(43)倾斜的鱼头滑道(13),所述鱼头滑道(13)上设置有放置锯条(11)的狭缝,所述锯条(11)的一侧设置有锯条防护罩(12),所述锯条防护罩(12)上设置有把手,所述锯条(11)的另一侧设置有限位块(16),所述限位块(16)上开有可供锯条(11)穿过的狭缝。
3.根据权利要求2所述的基于机器视觉的锯鱼头装置,其特征在于,所述鱼箱(4)设置于安装有两轮的搭载架(45)上,所述搭载架(45)的前部通过锁紧装置(46)与鱼箱(4)相连,所述搭载架(45)的中部通过固定支撑(44)与鱼箱(4)相连。
4.根据权利要求3所述的基于机器视觉的锯鱼头装置,其特征在于,所述锁紧装置(46)包括两个夹板(463),所述夹板(463)设置于搭载架(45)上,两个夹板(463)间设置有旋转把手(461)和卡紧片(465),所述卡紧片(465)的缺口与中心轴(464)相接触,所述中心轴(464)设置于鱼箱(4)前部。
5.一种基于机器视觉的锯鱼头方法,基于权利要求1-4中任意一项权利要求所述的基于机器视觉的锯鱼头装置实现,其特征在于,包括如下步骤:
6.根据权利要求5所述的基于机器视觉的锯鱼头方法,其特征在于,s1具体步骤如下:
7.根据权利要求6所述的基于机器视觉的锯鱼头方法,其特征在于,s2具体步骤如下:
8.根据权利要求7所述的基于机器视觉的锯鱼头方法,其特征在于,s22的具体步骤如下:
技术总结
本发明提供一种基于机器视觉的锯鱼头装置与方法,装置包括带锯机、六轴机械臂、龙门架和鱼箱,所述鱼箱内放置有待切割的鱼,所述鱼箱侧面设置有六轴机械臂,所述鱼箱上方设置有3D工业相机和2D工业相机,所述3D工业相机和2D工业相机设置于龙门架上,所述鱼箱后部设置有带锯机;所述3D工业相机识别鱼箱最上部的鱼,并将位置和角度信息传送给六轴机械臂,六轴机械臂对最上部的鱼进行抓取;所述2D工业相机识别鱼头和鱼身的连接处曲线并转换成切割轨迹传至六轴机械臂;所述六轴机械臂将鱼送到带锯机处,按切割轨迹切掉鱼头。本发明不仅能够消除安全隐患,而且能够进行高精度的切割以防止欠切割导致鱼肉混入鱼鳃杂质或过切割导致鱼肉浪费。
技术研发人员:魏鸿磊,赵赫,黄萌
受保护的技术使用者:大连工业大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!