一种体内导入控制装置的制作方法
[0001]
本发明涉及体内导入技术领域,尤其是涉及一种体内导入控制装置。
背景技术:
[0002]
支气管肺癌(简称肺癌)是世界范围内发病率及死亡率最高的恶性肿瘤,近年发病率及死亡率均呈逐年上升趋势。手术仍是目前肺癌最有效的治疗方法,但是由于早期肺癌临床表现无特异性,大多数患者确诊肺癌时已错过手术时机,而目前的化疗和放疗整体效果并不理想。早期诊断和手术是提高肺癌患者生存的关键,所以如何能在早期准确识别和诊断肺癌的技术就至关重要。
[0003]
目前肺癌早期筛查常用的方法是经皮肺穿刺活检或针吸,以获取病灶样本进行活检,该方法准确率较高,但是往往受限于病灶的位置以及大小,较小的外周肺结节等不适用,并且有可能引发气胸等并发症。故体内穿刺成为了关注的重点。同时,常规支气管镜检查仅能见到支气管腔内的病灶,对其进行组织及细胞学检查,对支气管腔外病灶无法探及,仅能依靠盲式活检、刷检来诊断,取样往往不尽如人意。常规支气管镜也受限于其设备大小,无法到达较细的气管部位。
[0004]
中国专利cn201910231360.5披露了一种改进型支气管镜,解决了现有的支气管镜在进行角度调节的时候,因现有调节模块在使用的时候容易出现滑动,不能很好的规定手指位置,这样在进行操作的时候不是很方便的问题。但其仍属于传统支气管镜范围,没有太大改动,当进行支气管镜镜检时仍存在操作不方便、易使患者支气管受损且难以进入更小的支气管分支的问题。
技术实现要素:
[0005]
本发明的目的就是为了克服上述现有技术存在操作不方便、易使患者支气管受损且难以进入更小的支气管分支的缺陷而提供一种体内导入控制装置。
[0006]
本发明的目的可以通过以下技术方案来实现:
[0007]
一种体内导入控制装置,包括导管、推送机构、绳驱动模块、绳固定模块和控制器;
[0008]
所述推送机构包括主动摩擦单元和被动摩擦单元,所述主动摩擦单元连接有驱动单元,所述主动摩擦单元和被动摩擦单元共同抵接所述导管,所述驱动单元通过驱动所述主动摩擦单元从而带动所述导管前进和后退;
[0009]
所述导管由多个节导管串联集成,每个节导管的内部设有沿节导管纵向分布的通孔,管壁设有沿节导管纵向分布的骨架弹簧和导丝,所述导管中远离所述推送模块的一端的一个或多个节导管中的导丝一一对应地连接所述绳驱动模块,所述导管中其余节导管中的导丝一一对应地连接所述绳固定模块;所述绳驱动模块和推送机构均连接所述控制器;
[0010]
所述绳驱动模块包括电机驱动机构,该电机驱动机构的输出端连接所述导丝,用于缠绕和释放导丝。
[0011]
进一步地,每个所述节导管的管壁中沿同一圆周均匀设有多个所述骨架弹簧和导
丝。
[0012]
进一步地,所述绳驱动模块和绳固定模块均还设有绳张紧机构,所述导丝经过所述绳张紧机构,连接所述电机驱动机构的输出端;
[0013]
所述绳张紧机构包括固定轮、可动轮、可动轮驱动单元和底板,所述底板分别固定连接所述固定轮和可动轮驱动单元,所述可动轮驱动单元的输出端连接所述可动轮,用于带动可动轮水平移动,所述可动轮与固定轮相配合,用于抵接导丝,并控制导丝的指向。
[0014]
进一步地,所述可动轮驱动单元包括调整头、调整固定块、调整活动块、调整杆、可动板、第一压块和第二压块;
[0015]
所述调整头连接所述调整杆,并受所述调整固定块固定,所述调整固定块受所述底板固定;所述调整杆还连接所述调整活动块,用于带动调整活动块移动;所述可动板分别连接所述调整活动块和所述可动轮,所述底板设有供所述可动板水平移动的导轨,所述第一压块和第二压块均连接所述底板,分别位于所述可动板的两侧,并设有限制所述可动板上下位移的凹槽。
[0016]
进一步地,所述电机驱动机构包括第一电机和电机座,所述绳驱动模块还包括第一底座,所述电机座分别连接所述第一电机和所述第一底座,所述第一电机的输出端连接所述导丝,所述第一电机受所述控制器控制。
[0017]
进一步地,所述主动摩擦单元包括主动摩擦轮,所述被动摩擦单元包括被动偏心轮,所述驱动单元包括第二电机,所述推送机构还包括支撑整个推送机构的第二底座,所述主动摩擦轮和被动偏心轮共同抵接所述导管,所述第二电机连接所述主动摩擦轮,用于带动主动摩擦轮转动,所述第二电机连接所述控制器。
[0018]
进一步地,所述通孔内用于放置灯源、摄像头或活检针。
[0019]
进一步地,所述骨架弹簧为圆柱螺旋弹簧。
[0020]
进一步地,所述节导管的管壁采用硅胶材质。
[0021]
进一步地,所述导管分为内层和外层,所述内层为集成的多个节导管,所述外层为鞘。
[0022]
进一步地,所述导管远离所述推送机构的一端的三个所述节导管中的导丝均连接所述绳驱动模块。
[0023]
进一步地,所述控制器还连接有手柄。
[0024]
与现有技术相比,本发明具有以下优点:
[0025]
(1)本发明通过构建由多个节导管串联集成导管,导管中间有通孔便于支气管镜或活检钳的伸入伸出,各节导管的管壁设有骨架弹簧和导丝,骨架弹簧实现弹性固定,导丝通过一一对应的绳驱动模块实现控制,实现对导管尾端不同姿态的控制;导管整体连接有由摩擦力驱动的推送机构实现前进和后退;
[0026]
本发明对患者支气管壁损坏较小:使用分节、绳驱动导管结构,导管的可控性和可弯曲程度增强,且管壁采用硅胶材质,鞘采用橡胶材质,故该导管对患者支气管壁的伤害较传统支气管镜小;
[0027]
本发明可进入更小支气管分支,精度更高:采用处理器控制电机旋转,进而带动导丝旋转和导管弯曲,相较传统支气管镜旋转、推进和定位等操作都靠医生手动操作完成,本发明的导管控制方式精度更高。
[0028]
(2)节导管的管壁中沿同一圆周均匀设有多个所述骨架弹簧和导丝,优选为三个,可实现对节导管多方位地调整。
[0029]
(3)本发明在绳驱动模块和绳固定模块中均还设有绳张紧机构,通过固定轮和可动轮保持导管在运动过程中,导丝处于张紧状态,便于实现精准控制、保证导管的整体可控,且便于导丝的布局。
[0030]
(4)本发明操作方便:通过手柄连接微型处理器控制电机的旋转和夹块的移动,医生只需拨动手柄上的摇杆控制导管运动,避免了使用传统支气管镜镜检时同时手动进行定位、推送和旋转的繁琐操作。
附图说明
[0031]
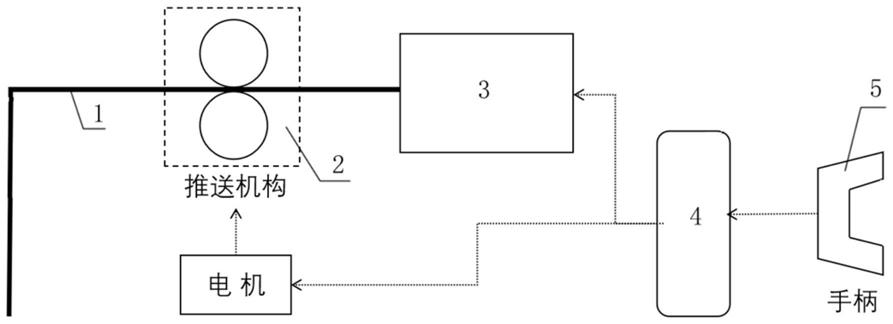
图1为本发明实施例中体内导入控制装置的整体结构示意图;
[0032]
图2为本发明实施例中绳驱动模块的结构示意图;
[0033]
图3为本发明实施例中绳张紧机构的结构示意图;
[0034]
图4为本发明实施例中导管的内部结构示意图;
[0035]
图5为本发明实施例中导管的整体结构示意图;
[0036]
图6为本发明实施例中导管的工作状态示意图;
[0037]
图7为本发明实施例中推送机构的结构示意图;
[0038]
图8为本发明实施例中控制器的连接示意图;
[0039]
图9为本发明实施例中控制器的控制流程示意图;
[0040]
图10为本发明实施例中手柄的结构示意图;
[0041]
图11为本发明实施例中控制器外接手柄的控制流程示意图;
[0042]
图12为本发明实施例中前后可动摇杆的标注角度示意图;
[0043]
图13为本发明实施例中360
°
可旋转摇杆的标注角度示意图;
[0044]
图中,1、导管,101、导丝,102、骨架弹簧,103、管壁,104、鞘,105、通孔,2、推送机构,201、第二底座,202、被动偏心轮,203、主动摩擦轮,204、第二电机,3、绳驱动模块,4、控制器,5、手柄,501、启动按钮,502、后退模式按钮,503、前进模式按钮,504、暂停按钮,505、可旋转摇杆,506、前后可动摇杆,507、紧急断电按钮,6、绳张紧机构,601、调整头,602、调整固定块,603、调整活动块,604、调整杆,605、底板,606、可动板,607、第一压块,608、第二压块,609、第一可动轮,610、第二可动轮,611、第一固定轮,612、第二固定轮,613、第三固定轮,7、电机驱动机构,701、第一电机,702、电机座,8、导管支架,9、第一底座,10、镜体,11、灯源,12、摄像头,13、活检针。
具体实施方式
[0045]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0046]
实施例1
[0047]
本实施例提供一种体内导入控制装置,包括导管1、推送机构2、绳驱动模块3、绳固定模块和控制器4;
[0048]
推送机构2包括主动摩擦单元和被动摩擦单元,主动摩擦单元连接有驱动单元,主动摩擦单元和被动摩擦单元共同抵接导管1,驱动单元通过驱动主动摩擦单元从而带动导管1前进和后退;
[0049]
导管1由多个节导管串联集成,每个节导管的内部设有沿节导管纵向分布的通孔105,管壁103设有沿节导管纵向分布的骨架弹簧102和导丝101,导管1中远离推送模块的一端的一个或多个节导管中的导丝101一一对应地连接绳驱动模块3,导管1中其余节导管中的导丝101一一对应地连接绳固定模块;绳驱动模块3和推送机构2均连接控制器4;本实施例中,相邻两个节导管间还连接有连接件,该连接件可以为橡胶材料的连接套。
[0050]
绳驱动模块3包括电机驱动机构7,该电机驱动机构7的输出端连接导丝101,用于缠绕和释放导丝101。
[0051]
作为一种优选的实施方式,每个节导管的管壁103中沿同一圆周均匀设有多个骨架弹簧102和导丝101。
[0052]
作为一种优选的实施方式,绳驱动模块3和绳固定模块均还设有绳张紧机构6,导丝101经过绳张紧机构6,连接电机驱动机构7的输出端;
[0053]
绳张紧机构6包括固定轮、可动轮、可动轮驱动单元和底板605,底板605分别固定连接固定轮和可动轮驱动单元,可动轮驱动单元的输出端连接可动轮,用于带动可动轮水平移动,可动轮与固定轮相配合,用于抵接导丝101,并控制导丝101的指向。
[0054]
作为一种优选的实施方式,可动轮驱动单元包括调整头601、调整固定块602、调整活动块603、调整杆604、可动板606、第一压块607和第二压块608;
[0055]
调整头601连接调整杆604,并受调整固定块602固定,调整固定块602受底板605固定;调整杆604还连接调整活动块603,用于带动调整活动块603移动;可动板606分别连接调整活动块603和可动轮,底板605设有供可动板606水平移动的导轨,第一压块607和第二压块608均连接底板605,分别位于可动板606的两侧,并设有限制可动板606上下位移的凹槽。
[0056]
作为一种优选的实施方式,电机驱动机构7包括第一电机701和电机座702,绳驱动模块3还包括第一底座9,电机座702分别连接第一电机701和第一底座9,第一电机701的输出端连接导丝101,第一电机701受控制器4控制。
[0057]
作为一种优选的实施方式,主动摩擦单元包括主动摩擦轮203,被动摩擦单元包括被动偏心轮202,驱动单元包括第二电机204,推送机构2还包括支撑整个推送机构2的第二底座201,主动摩擦轮203和被动偏心轮202共同抵接导管1,第二电机204连接主动摩擦轮203,用于带动主动摩擦轮203转动,第二电机204连接控制器4。
[0058]
作为一种优选的实施方式,通孔105内用于放置灯源11、摄像头12或活检针13。
[0059]
作为一种优选的实施方式,骨架弹簧102为圆柱螺旋弹簧。
[0060]
作为一种优选的实施方式,节导管的管壁103采用硅胶材质。
[0061]
作为一种优选的实施方式,导管1分为内层和外层,内层为集成的多个节导管,外层为鞘104。
[0062]
作为一种优选的实施方式,导管1远离推送机构2的一端的三个节导管中的导丝101均连接绳驱动模块3。
[0063]
作为一种优选的实施方式,控制器4还连接有手柄5。
[0064]
将上述优选的实施方式进行组合可以得到一种最优的实施方式,下面对该最优的
实施方式的工作原理进行描述。
[0065]
本实施例中控制器采用微信处理机,通过微信处理机控制各个第一电机701,实现导管的旋转、弯曲运动,控制第二电机204实现导管的推拉运动;微型处理机后端连接手柄,进而实现推动手柄摇杆控制导管运动,且二者运动坐标系统一。手柄上分别设有控制导管上下左右和前后运动的摇杆,摇杆拨动方向与导管头部运动方向一致。
[0066]
借鉴血管介入手术领域所用导管,本导管采用多节式软体结构,管壁为硅胶材质,中间有通孔,便于支气管镜或活检钳的伸入伸出。该导管外层为鞘,起到密封和保护作用。如图4所示,导管管壁中心圈每隔60
°
穿孔,便于穿过导丝和骨架弹簧,骨架弹簧为圆柱螺旋弹簧,且这两者间隔穿入。值得注意的是,如图5所示,三根骨架弹簧从导管头部延伸至尾部。导管的驱动方式采用绳驱动,即第一节导管穿入三根导丝,之后每增加一节导管增加三根导丝,所有导丝都延伸至导管尾部进行张紧,但除前三节导管9根导丝外的导丝只张紧,不采用电机旋转控制。
[0067]
导管的弯曲、旋转运动通过电机旋转带动绑在电机上的导丝旋转实现,而导管的伸缩运动通过安装于绳驱动模块3前端的推送机构2实现,如图1所示,推送机构2由两个摩擦轮和电机构成。电机控制摩擦轮的正转和反转,从而实现导管的伸缩运动。旋转用电机和推送用电机都由微型处理机控制实现,其后端连接手柄,从而实现手柄控制导管运动的目的。
[0068]
下面详细说明各部分的具体实现方法:
[0069]
如图2所示,绳驱动模块3包括导丝101,绳张紧机构6,第一电机701、电机座702,导管受导管支架8固定,第一电机701的输出端连接有转轴。导丝绕在转轴上,从而电机旋转可带动导丝旋转,而如图3,绳张紧装置包括调整头601、调整固定块602、调整活动块603、调整杆604、底板605、可动板606、第一压块607、第二压块608、第一可动轮609、第二可动轮610、第一固定轮611、第二固定轮612和第三固定轮613。工作时,通过旋转调整头601,可使调整活动块603和调整杆604移动,从而使可动板606以及其上第一可动轮609和第二可动轮610移动,达到张紧绳的目的,第一可动轮609和第二可动轮610越靠近第一固定轮611、第二固定轮612和第三固定轮613,则绳的张紧效果越好,具体操作时,可综合绳的强度与所需张紧程度调节第一可动轮609和第二可动轮610,以达到最佳张紧效果。
[0070]
如图4所示,导管内部结构为中央通孔105,导管圆周中心线上以60
°
为间隔均匀排布导丝101、骨架弹簧102,图4所示为第一个节导管,其后每增加一节导管增加三根导丝,如图5。且每根导丝都延伸至导管尾部并单独连接一套绳张紧装置,前三节导管上的导丝还需连接至电机,以进行旋转控制。
[0071]
导管1的工作过程如图6所示,先在导管内伸入镜体10,镜体10包括灯源11和摄像头12。当导管1到达病灶附近,则退回镜体10,再向管内通孔插入活检针13,完成活检后,再退出活检针13,随后缩回导管1。
[0072]
如图7所示为导管的推送机构2,由第二底座201、被动偏心轮202、主动摩擦轮203和第二电机204组成。导管被夹持在两个摩擦轮之间,通过导管与摩擦轮表面间产生的摩擦力,完成导管的推拉动作。第二电机204连接微型处理机,通过手柄5发出前进后退信号给微型处理器,再由微型处理器控制第二电机204的正反转。当第二电机204正转时,带动主动摩擦轮203正转,实现导管1的前进;反之,第二电机204反转实现导管1的后退。
[0073]
如图8所示为stm32型号微型处理器的连接示意图,其上接有供电机使用的电源模块、与手柄实现蓝牙连接所需的接收机模块和用以控制10个电机转动的mini stm32模块。
[0074]
对体内导入控制装置的控制,可通过现有技术控制电机的开通和关断即可,本实施例中提供一种采用手柄的控制方式,如下。
[0075]
如图10所示为手柄结构示意图,当按下启动按钮501,系统开始供电,按下前进模式按钮503,导管运动进入前进模式,当向后拨动前后可动摇杆506,可避免导管连续向后运动损伤气管壁;当向前拨动前后可动摇杆506,导管会根据拨动时长进行前进运动。同理,当按下后退模式按钮502,导管进入后退模式,张紧的绳索全部放松,此时前后可动摇杆506向前拨动为无效操作,当向后拨动前后可动摇杆506,导管会根据拨动时长进行后退运动。
[0076]
当按下暂停按钮504,导管运动暂停,系统不断电,但只有按下启动按钮501时,导管才能继续受手柄控制运动。运动过程中导管前进或后退方向由360
°
可旋转摇杆505决定。如遇紧急医疗事故情况,如导管滑丝导致气管壁大出血等,可按下sos紧急断电按钮507,使系统断电,工作紧急停止,等待医生手动进行处理。此时,即使再次按下启动按钮501,系统也不会再次供电,如需再次启动,需手动开启电源。具体算法实现过程如图11所示,前后可动摇杆506和360
°
可旋转摇杆505的标注角度示意如图12和图13所示。
[0077]
工作过程描述:
[0078]
医师术前了解病患位置并进行路径规划后,将镜体顺导管中心通孔伸入并固定于前端卡口106,再将导管顺套管伸入患者气管中,便可通过手柄控制导管运动。当导管头部到达病灶,医生可撤出镜体,再沿该通孔放入活检针,取部分目标病灶后撤出活检针,放松已张紧的各条导丝,再沿原路缩回导管,完成活检手术。
[0079]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1