按摩机器人的制作方法
1.本实用新型涉及医疗器械技术领域,特别涉及一种按摩机器人。
背景技术:
2.按摩是具有中医特色的传统而古老的治疗方法之一,具有操作简便、效果明显、疗效肯定的优点。随着医学模式的转变,人们对天然疗法的追求显著增加,按摩椅、按摩床等医疗器械发展迅速,然而目前的按摩器械由于缺乏中医基础理论指导,设计不符合人体的生理结构和缺乏反馈调节机制,大大限制了其临床疗效,也限制了其中医特色和优势的发挥。
3.按摩机器人的出现和发展则从很大程度上弥补了按摩椅、按摩床等按摩器械的缺点,发挥出了我国传统按摩理论的巨大作用。人们通过按摩机器人按摩可缓解疲劳、放松身心、改善血液循环、加速人体新陈代谢,以达到增强免疫力、保健养生的目的。市场上各类按摩机器人层出不穷,目前最为常见的类型是多关节机械臂搭载按摩组件,以通过按摩组件振动对人体进行按摩。
4.然而,现有的按摩机器人仅具备单个按摩头,其每次仅能实现对人体单个位置处的按摩,按摩效果欠佳;并且其仅具备物理按摩功能,按摩形式较为单一,对人体无法形成很好的理疗效果,也无法满足用户更多的按摩需求。
技术实现要素:
5.本实用新型的主要目的是提出一种按摩机器人,旨在解决目前的按摩机器人按摩效果欠佳和按摩形式单一的问题。
6.为实现上述目的,本实用新型提出一种按摩机器人,该按摩机器人包括机座和设置在所述机座上的龙门架,所述龙门架上设置有多个按摩机构和结构光组件,所述按摩机构包括驱动模组和与所述驱动模组的输出执行端连接的按摩头,所述按摩头上设有多个用于与人体接触的射频触柱,所述结构光组件用于获取人体的三维图像。
7.优选地,所述按摩头包括与所述驱动模组的输出执行端连接的连接座、用于安装多个所述射频触柱的底座以及设置在所述连接座和底座之间的缓冲件。
8.优选地,所述驱动模组包括用于驱动所述按摩头摆动的转动组件。
9.优选地,所述转动组件包括第一舵机、与所述第一舵机的输出轴连接的第一支架、设置在所述第一支架上的第二舵机和与所述第二舵机的输出轴连接、用于设置所述按摩头的第二支架,所述第一舵机用于驱动所述第一支架沿所述按摩头的左右方向摆动,第二舵机用于驱动所述第二支架沿所述按摩头的前后方向摆动。
10.优选地,所述驱动模组还包括设置在所述龙门架上的y轴模组、与所述y轴模组的输出执行端连接的x轴模组和与所述x轴模组的输出执行端连接的z轴模组,所述按摩头设置在所述z轴模组的输出执行端上。
11.优选地,所述按摩机器人还包括设置在所述龙门架上的控制器,所述控制器包括
显示屏和多个功能按键。
12.优选地,所述按摩机器人还包括设置在所述机座上并位于所述龙门架下方的卧床。
13.优选地,所述卧床包括床架和设置在所述床架底部的滑动组件,所述滑动组件包括与所述机座可拆卸连接的安装架、设置在所述安装架上的直线滑轨和与所述直线滑轨滑动配合的滑块,所述滑块与所述床架固定连接。
14.优选地,所述卧床还包括设置在所述床架上的固定架和用于阻止所述滑块移动的锁止机构,所述锁止机构包括设置在所述固定架上的握压部、闸线、卡块和套设在所述闸线上的弹性件,所述闸线的一端与所述握压部连接,所述闸线的另一端穿过所述滑块并与所述卡块连接,所述弹性件设置在所述滑块与所述卡块之间,所述卡块上设有齿纹,所述直线滑轨沿其长度方向设有可与所述卡块相卡持的齿条。
15.优选地,所述机座与所述龙门架围合成回字形结构。
16.本实用新型技术方案的有益效果在于:本按摩机器人通过结构光组件获取人体皮肤表面三维图像并智能绘制按摩路径,按摩机构的按摩头通过驱动模组驱动按照其按摩路径以对人体按摩。按摩机构为设置在龙门架上的多个,可同时同步对人体进行按摩,增强了按摩效果;并且按摩头上所设的多个射频触柱,可进行多级射频和3d穿透加热,达到中医理疗的效果,丰富了按摩功能,提高了按摩舒适度以及提升用户体验。
附图说明
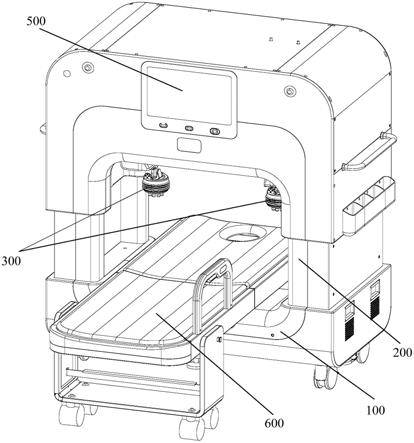
17.图1为本实用新型按摩机器人一实施例的结构示意图;
18.图2为图1中按摩机器人一部分的结构示意图;
19.图3为图1中按摩机器人又一部分的结构示意图;
20.图4为图1中按摩机器人的卧床的结构示意图;
21.图5为图4中卧床一部分的结构示意图;
22.图6为图4中卧床又一部分的结构示意图。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的方案进行清楚完整的描述,显然,所描述的实施例仅是本实用新型中的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.本实用新型提出一种按摩机器人,参照图1至图3,该按摩机器人包括机座100和设置在机座100上的龙门架200,龙门架200上设置有多个按摩机构300和结构光组件400,按摩机构300包括驱动模组310和与驱动模组310的输出执行端连接的按摩头320,按摩头320上设有多个用于与人体接触的射频触柱10,结构光组件400用于获取人体的三维图像。
25.基于人体外形部位特征,为进一步提升按摩机器人的按摩性能,本实施例提出一种按摩机器人,参照图1和图2,该按摩机器人包括机座100、龙门架200、多个按摩机构300以及结构光组件400,其中:
26.机座100为本按摩机器人的结构基础,龙门架200设置在机座100上,龙门架200包
括横梁和设置于横梁两侧的竖梁,其用于安装按摩机构300、结构光组件400以及其它结构,龙门架200的上方设有与其适配的外壳,以提供机械保护。
27.按摩机构300用于对人体进行按摩,其安装在龙门架200上,可为相对设置的两个,包括但不限于此。参照图1,龙门架200的左右两侧各设置一个按摩机构300。按摩机构300包括驱动模组310和按摩头320,驱动模组310位于龙门架200上,按摩头320位于龙门架200的下方,按摩头320通过驱动模组310的驱动而移动。其中,驱动模组310可为x、y、z三轴模组,可驱动按摩头320沿x、y、z三轴移动,x、y、z三轴模组之间的连接关系以及位置关系可根据实际情况设置,其进一步的结构设置在后续实施例中进行说明,在此不作具体阐述。
28.参照图3,按摩头320上设有射频触柱10且为多个,射频触柱10可对人体进行射频按摩,其内设有射频发生器,在射频触柱10接触人体时,射频发生器发射的射频波可穿透人体皮肤,进入皮下组织并作用到胶原内的水分子使其极性改变,高频水分子震动旋转摩擦生热,以刺激胶原收紧重塑,修复老化受损的胶原层。
29.作为较优选择,射频发生器可由多对电极片组成,以实现多级射频,有效且安全。本实施例中,射频触柱10其能够在表皮温度不超过42℃的情况下,通过射频将穴位下靶向组织升温到44℃~46℃,以热疗的方式持续按摩若干分钟,可促进按摩部位乃至全身的血液循环,促进机体新陈代谢,提高免疫力,同时还可降低细菌或病毒活性,以起到辅助治疗、延缓疾病进程的的作用。
30.另外,按摩头320上还可设置测温组件,以通过测温组件实时监测人体皮肤表面温度,以根据人体皮肤表面温度调整按摩头320的射频参数、按摩速度、按摩轨迹等信息,达到对射频理疗效果的智能控制。作为优选,测温组件可采用红外测温传感器。
31.参照图2,结构光组件400设置在龙门架200上,可为多个且分别位于龙门架200的多处位置,比如龙门架200的左右两侧以及上侧。结构光组件400可包括摄像头和发射器,摄像头可包括红外光摄像头、可见光摄像头,发射器可为红外光发射器。在采集人体部位图像时,结构光组件400位于人体的正上方以及左右两侧,通过可见光摄像头拍摄2d图片,采集人体部位的平面轴(即x、y轴)信息;使用红外发射器发射经过特殊调制的不可见红外光至人体部位上,再通过红外摄像头接收被人体部位反射的红外光,采集深度轴(即z轴)信息,确定被测部位的景深信息。当然,此时还包括与结构光组件400电连接的处理模块(即处理芯片)将拍摄的2d图片与获取的3d信息相结合,生成具备空间信息的三维图像,以供本按摩机器人规划按摩头320的按摩路径。具体地,对结构光组件400所采集的三维图像数据进行计算以得出按摩路径的原理为:对结构光组件400所采集的点云进行裁剪、降采样、平滑等操作得到初步处理后的点云,利用点云切片算法得到切片点云,通过切片点云去重影去除以及点排序自动生成摄像头扫描坐标系下的轨迹点,然后将摄像头扫描坐标系下的轨迹点通过位姿变换转换成驱动模组310坐标系下的轨迹点,并对该轨迹点进行法向、姿态等位姿计算而得出按摩路径。另外进行脚本编程,将按摩路径转换为驱动模组310可识别及可执行的驱动程序,驱动模组310根据该驱动程序以驱动按摩头320移动。
32.本按摩机器人通过结构光组件400获取人体皮肤表面三维图像并智能绘制按摩路径,按摩机构300的按摩头320通过驱动模组310驱动按照其按摩路径以对人体按摩。按摩机构300为设置在龙门架200上的多个,可同时同步对人体进行按摩,增强了按摩效果;并且按摩头320上所设的多个射频触柱10,可进行多级射频和3d穿透加热,达到中医理疗的效果,
丰富了按摩功能,提高了按摩舒适度以及提升用户体验。
33.在一较佳实施例中,参照图3,按摩头320包括与驱动模组310的输出执行端连接的连接座321、用于安装多个射频触柱10的底座322以及设置在连接座和底座322之间的缓冲件323。具体地,连接座321与驱动模组310的输出执行端连接固定,连接座321、缓冲件323和底座322依次连接。作为优选,该缓冲件323可为由硅胶制成的软体外壳。按摩头320在按摩时,缓冲件323被挤压呈折叠状态,缓冲件323提供弹性力以抵消射频触柱10与人体之间的部分作用力,可保证射频触柱10不与人体刚性接触,实现与皮肤的友好接触,提高按摩安全性,以及进一步提高按摩舒适度。
34.在一较佳实施例中,参照图3,驱动模组310包括用于驱动按摩头320摆动的转动组件311。本实施例中,转动组件311的作用在于丰富按摩头320的按摩动作,加强按摩效果,以及进一步扩大按摩头320的按摩范围。其中,转动组件311可采用舵机或电机的驱动器件,按摩头320可设置于其输出轴一端,以接收其输出动力而实现转动。
35.进一步地,转动组件311包括第一舵机311a、与第一舵机311a的输出轴连接的第一支架311b、设置在第一支架311b上的第二舵机311c和与第二舵机311c的输出轴连接、用于设置按摩头320的第二支架311d,第一舵机311a用于驱动第一支架311b沿按摩头320的左右方向摆动,第二舵机311c用于驱动第二支架311d沿按摩头320的前后方向摆动。
36.具体地,第一舵机311a、第一支架311b、第二舵机311c、第二支架311d以及按摩头320依次连接设置,其中,可以理解的是,通过第一舵机311a对第一支架311b的驱动,可间接带动按摩头320沿其左右方向摆动;通过第二舵机311c对第二支架311d的驱动,可间接带动按摩头320沿其前后方向转动,从而实现按摩头320的多方位按摩,按摩范围广,按摩效果得以提升。
37.在一较佳实施例中,参照图2,驱动模组310包括还包括设置在龙门架200上的y轴模组312、与y轴模组312的输出执行端连接的x轴模组313和与x轴模组313的输出执行端连接的z轴模组314,按摩头320设置在z轴模组314的输出执行端上。
38.本实施例中,驱动模组310通过其依次设置的y轴模组312、x轴模组313和z轴模组314,可实现对按摩头320在y轴、x轴和z轴方向的驱动。其中,y轴模组312、x轴模组313和z轴模组314采用电机、丝杠以及导轨的驱动组件,驱动稳定,按摩头320位置精准。当然,y轴模组312、x轴模组313和z轴模组314可采用的驱动组件的结构形式不仅限于此,也可为同步带、轮等,需根据实际情况而定。结合上一实施例时,其第一舵机311a固定设置于z轴模组314的输出执行端。
39.在一较佳实施例中,参照图1,按摩机器人还包括设置在龙门架200上的控制器500,控制器500包括显示屏和多个功能按键。其中,显示屏用于显示人体皮肤表面三维图像、按摩轨迹等,功能按键包括开关按键、开始按键、暂停按键、复位按键和调节按键等等,其中,开关按键用于本按摩机器人的开关机操作,具体为长按开关按键预设秒数,如5秒,以完成开机或关机操作。开始按键用于按摩机构300的开始操作,暂停按键用于按摩机构300的停止操作,复位按键则用于驱动模组310的复位操作,以对驱动模组310的位置进行初始化。调节按键则用于设置按摩参数,包括按摩摆幅参数、能量参数、力度参数、速度参数、时间参数及自转幅度参数等,并且,还可通过显示屏对温度、按摩力度等信息进行状态监测,以优化按摩理疗效果。
40.在一较佳实施例中,参照图1、图4和图5,按摩机器人还包括设置在机座100上并位于龙门架200下方的卧床600。龙门架200下方所设卧床600用于供人体躺卧,以与其上方对人体进行按摩的按摩头320配合,进一步提升按摩体验,为人体按摩提供方便。
41.进一步地,参照图5,卧床600包括床架610和设置在床架610底部的滑动组件620,滑动组件620包括与机座100可拆卸连接的安装架621、设置在安装架621上的直线滑轨622和与直线滑轨622滑动配合的滑块623,滑块623与床架610固定连接。卧床600在机座100上为滑动设置,并且卧床600的一端通过滚轮支撑其在地面上移动,从而卧床可沿其长度方向直线移动,以使人体进出按摩空间,操作简单,移动方便。
42.其中,滑动设置的形式可为多种,卧床600的床架610与机座100之间可设置导轨滑块、导杆滑套等。进一步地,参照图5,床架610与机座100之间设有滑动组件620,通过滑动组件620实现床架610与机座100之间的滑动连接,具体的,机座100上设有可拆卸的安装架621,该安装架621上设有两相对布置的直线滑轨622,床架610则与两直线滑轨622上的滑块623连接固定,可沿直线滑轨622移动,结构简单,易于设置。其中,安装架621可采用螺丝实现可拆卸安装,或者设置其他快拆结构实现。
43.另外,在卧床600床板的一端设有与人体脸部相适配的开口,该开口用于放置人体脸部,方便人体趴着进行背部按摩。并且,该开口的内侧边沿为贴合人体脸部设计的弧形结构,可增强按摩时的舒适度。为方便本按摩机器人的移动和放置,机座100的底部设有脚轮和脚杯。
44.进一步地,参照5和图6,卧床还包括设置在床架610上的固定架630和用于阻止滑块移动的锁止机构640,锁止机构640包括设置在固定架630上的握压部641、闸线642、卡块643和套设在闸线642上的弹性件644,闸线642的一端与握压部641连接,闸线642的另一端穿过滑块623并与卡块643连接,弹性件644设置在滑块623与卡块643之间,卡块643上设有齿纹,直线滑轨622沿其长度方向设有可与卡块643相卡持的齿条645。
45.因卧床600为可移动设置,本实施例中,为使得卧床600在移动到某一位置处后可实现固定,故设置握压部641、闸线642、卡块643、弹性件644以及齿条645等结构。具体地,握压部641设置在位于床架610的一侧的固定架630上,闸线642从固定架630及床架610穿过,并从上至下穿过滑块623,与位于滑块623下方的卡块643连接,在握压部641为自然状态时,在弹性件644的弹力作用下,卡块643通过其上的齿纹与齿条645配合卡持,此时卧床600处于不可移动的状态。当想移动卧床600时,可握紧握压部641使得闸线642带动卡块643向上移动,以使得卡块643与齿条645脱离,与此同时,弹性件644被压缩,从而便可移动卧床600,到达目标位置后松掉握压部641,卡块643便可向下移动,并在弹性件644的弹力作用下,卡块643复位与齿条645相卡持,结构配合稳定,使用方便。作为优选,弹性件644为弹簧。
46.在一较佳实施例中,参照图1,机座100与龙门架200围合成回字形结构。龙门架200的两侧与机座100连接固定,围合成回字形结构,其结构更加紧凑稳固;并且形成安全的按摩空间,人体处于该按摩空间内按摩,安全且方向。
47.以上的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1