内窥镜接头、机器人手术系统及内窥镜接头的旋转位置调整方法与流程
1.本发明涉及内窥镜接头、机器人手术系统及内窥镜接头的旋转位置调整方法,特别涉及将内窥镜保持为能够旋转的内窥镜接头、具备内窥镜接头的机器人手术系统及内窥镜接头的旋转位置调整方法。
背景技术:
2.以往,已知将内窥镜保持为能够旋转的内窥镜接头。
3.在日本特开2020
‑
31767号公报中公开了将内窥镜保持为能够旋转的内窥镜接头。该内窥镜接头具备:能够拆卸地与帷帘接头连接的基部、将内窥镜保持为能够旋转的保持部(内窥镜保持部)、经由帷帘接头由机器人臂的旋转驱动部(驱动部)驱动而旋转的被驱动构件以及使被驱动构件的旋转减速并传递给保持部的传递机构。即,传递机构构成为使被驱动构件的旋转减速并传递给内窥镜保持部。
4.另外,在日本特开2020
‑
31767号公报中公开了一种机器人手术系统,其能够通过使操作手柄转动,从而使机器人臂的旋转驱动部旋转驱动而使内窥镜旋转。
技术实现要素:
5.在此,在利用日本特开2020
‑
31767号公报记载的机器人手术系统进行手术时,例如,在将内窥镜安装于机器人臂时的初期,为了使内窥镜的视野成为相同或为了将使内窥镜旋转时的操作手柄的能够左右旋转的量设为均等,有想将内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点的要求。特别是在日本特开2020
‑
31767号公报记载的内窥镜接头具备使利用机器人臂的驱动部产生的旋转减速并传递给内窥镜保持部的传递机构的情况下,存在难以使内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点的问题。
6.本发明为解决上述课题而做出,本发明的目的在于提供能够将内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点的内窥镜接头、机器人手术系统及内窥镜接头的旋转位置调整方法。
7.为了达成上述目的,本发明的第一方面的内窥镜接头是一种与机器人手术系统的机器人臂连接的内窥镜接头,其中,具备:内窥镜保持部,所述内窥镜保持部将内窥镜保持为能够旋转;以及基部,所述基部包括安装于机器人臂的安装部、设置于安装部并由机器人臂的驱动部驱动而旋转的被驱动构件及使被驱动构件的旋转减速并传递给内窥镜保持部的传递机构,传递机构包括:驱动传递轴,所述驱动传递轴通过被驱动构件的旋转而旋转;第一联结构件,所述第一联结构件与驱动传递轴一体地旋转;以及第二联结构件,所述第二联结构件设置成能够相对于驱动传递轴旋转,并与第一联结构件联结并旋转,基部包括通过与第二联结构件抵接从而使驱动传递轴的旋转停止的止动部。
8.在本发明的第一方面的内窥镜接头中,如上所述,使传递机构构成为包括通过被
驱动构件的旋转而旋转的驱动传递轴、与驱动传递轴一体地旋转的第一联结构件以及能够相对于驱动传递轴旋转地设置并与第一联结构件联结并旋转的第二联结构件,并且使基部构成为包括通过与第二联结构件抵接从而使驱动传递轴的旋转停止的止动部。由此,通过使被驱动构件旋转直到与第一联结构件联结并旋转的第二联结构件与止动部抵接,从而能够使被驱动构件旋转到成为机械端位(机械的动作极限)并停止。因此,在被驱动构件上预先设定有旋转角度范围(一侧的机械端位与另一侧的机械端位之间)中的原点的情况下,能够基于设定的旋转角度范围与原点的关系,使配置在机械端位的被驱动构件配置于原点。即,在具备使被驱动构件旋转驱动的驱动部的机器人臂中,能够将使被驱动构件配置于原点时的驱动部的旋转位置设定为原点(能够使驱动部的旋转位置配置于原点)。另外,通过使被驱动构件配置于原点,从而能够使被传递被驱动构件的旋转的内窥镜保持部所保持的内窥镜也配置于原点。结果,能够提供在将内窥镜安装于机器人臂等时可将内窥镜及机器人臂的驱动部配置在各自的旋转角度范围内的原点的内窥镜接头。
9.另外,为了达成上述目的,本发明的第二方面的机器人手术系统具备:机器人臂;内窥镜接头,所述内窥镜接头与机器人臂连接;以及控制部,所述控制部控制所述机器人臂的驱动部,内窥镜接头具备:内窥镜保持部,所述内窥镜保持部将内窥镜保持为能够旋转;以及基部,所述基部包括安装于机器人臂的安装部、设置于安装部并由机器人臂的驱动部驱动而旋转的被驱动构件及使被驱动构件的旋转减速并传递给内窥镜保持部的传递机构,传递机构包括:驱动传递轴,所述驱动传递轴通过被驱动构件的旋转而旋转;第一联结构件,所述第一联结构件与驱动传递轴一体地旋转;以及第二联结构件,所述第二联结构件设置成能够相对于驱动传递轴旋转,并与第一联结构件联结并旋转,基部包括通过与第二联结构件抵接从而使驱动传递轴的旋转停止的止动部,控制部构成为进行如下控制:基于通过第二联结构件与止动部抵接从而驱动传递轴的旋转停止时的机器人臂的驱动部的旋转位置,使驱动部的旋转位置配置于原点。
10.在本发明的第二方面的机器人手术系统中,如上所述,与上述第一方面的内窥镜接头同样地构成传递机构。由此,与上述第一方面的内窥镜接头同样地,能够使被驱动构件旋转到成为机械端位(机械的动作极限)并停止。另外,在上述第二方面的机器人手术系统中,如上所述,控制机器人臂的驱动部的控制部构成为进行如下控制:基于驱动传递轴的旋转停止时的机器人臂的驱动部的旋转位置,使驱动部的旋转位置配置于原点。由此,能够通过控制部的控制,基于被驱动构件配置在机械端位的情况下的机器人臂的驱动部的旋转位置,使驱动部的旋转位置配置于原点。即,在被驱动构件上预先设定有旋转角度范围(一侧的机械端位与另一侧的机械端位之间)中的原点的情况下,能够通过基于设定的旋转角度范围与原点的关系,使驱动部旋转以便使配置在机械端位的被驱动构件配置于原点,从而使驱动部的旋转位置配置于原点。另外,通过使被驱动构件配置于原点,从而能够使被传递被驱动构件的旋转的内窥镜保持部所保持的内窥镜也配置于原点。结果,能够提供在将内窥镜安装于机器人臂等时能够将内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点的机器人手术系统。
11.另外,为了达成上述目的,本发明的第三方面的内窥镜接头的旋转位置调整方法是与机器人手术系统的机器人臂连接的内窥镜接头的旋转位置调整方法,其中,具备:准备内窥镜接头的工序,所述内窥镜接头具备基部和将内窥镜保持为能够旋转的内窥镜保持
部,基部包括安装于机器人臂的安装部、设置于安装部并由机器人臂的驱动部驱动而旋转的被驱动构件以及包括通过所述被驱动构件的旋转而旋转的驱动传递轴并使被驱动构件的旋转减速并传递给内窥镜保持部的传递机构;在将内窥镜接头安装于机器人臂后通过利用所述机器人臂的所述驱动部使所述被驱动构件旋转从而使所述驱动传递轴旋转的工序;使所述被驱动构件旋转到机械端位而使所述驱动传递轴的旋转停止的工序;以及在使驱动传递轴的旋转停止的工序之后基于驱动传递轴的旋转停止时的机器人臂的驱动部的旋转位置使驱动部的旋转位置配置于原点的工序。
12.在本发明的第三方面的内窥镜接头的旋转位置调整方法中,如上所述,在将内窥镜接头安装于机器人臂后,通过利用机器人臂的驱动部使被驱动构件旋转,从而使驱动传递轴旋转,通过使被驱动构件旋转到机械端位,从而使驱动传递轴的旋转停止。在上述第三方面的内窥镜接头的旋转位置调整方法中,如上所述,在使驱动传递轴的旋转停止之后,基于驱动传递轴的旋转停止时的机器人臂的驱动部的旋转位置使驱动部的旋转位置配置于原点。由此,与上述第二方面的机器人手术系统同样地,能够基于被驱动构件配置在机械端位的情况下的机器人臂的驱动部的旋转位置,使驱动部的旋转位置配置于原点。即,通过使驱动部旋转以便使配置在机械端位的被驱动构件配置于原点,从而能够使驱动部的旋转位置配置于原点,并且能够使被传递被驱动构件的旋转的内窥镜保持部所保持的内窥镜也配置于原点。结果,能够在将内窥镜安装于机器人臂等时使内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点。
13.根据本发明,如上所述,能够使内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点。
附图说明
14.图1是示出本发明的一实施方式的机器人手术系统的概略的图。
15.图2是示出本发明的一实施方式的机器人手术系统的控制结构的框图。
16.图3是示出经由内窥镜接头将内窥镜安装于本发明的一实施方式的机器人臂而成的状态的立体图。
17.图4是示出从本发明的一实施方式的机器人臂拆下帷帘接头及内窥镜接头而成的状态的分解立体图。
18.图5是从下方观察本发明的一实施方式的内窥镜接头及帷帘接头得到的分解立体图。
19.图6是示出本发明的一实施方式的内窥镜接头的一部分的立体图。
20.图7是示出本发明的一实施方式的内窥镜接头的传递机构的侧视图。
21.图8的(a)是示出使本发明的一实施方式的内窥镜接头的被驱动构件配置于原点而成的状态的俯视图。
22.图8的(b)是示出使本发明的一实施方式的内窥镜接头的被驱动构件配置在机械端位而成的状态的俯视图。
23.图9是示出本发明的一实施方式的内窥镜接头的旋转位置调整机构的立体图。
24.图10是示出本发明的一实施方式的内窥镜接头的旋转位置调整机构的放大立体图。
25.图11是示出将本发明的一实施方式的内窥镜接头的旋转位置调整机构分解而成的状态的立体图。
26.图12是示出本发明的一实施方式的内窥镜接头的驱动传递轴的键槽的立体图。
27.图13是示出本发明的一实施方式的内窥镜接头的止动部的立体图。
28.图14是本发明的一实施方式的内窥镜接头的旋转位置调整方法的流程图。
具体实施方式
29.以下,基于附图说明将本发明具体化得到的实施方式。
30.(机器人手术系统的结构)
31.参照图1及图2,说明本发明的一实施方式的机器人手术系统100的结构。
32.如图1所示,机器人手术系统100具备远程操作装置1、患者侧装置2及图像处理装置3。
33.远程操作装置1是为了对设置在患者侧装置2的医疗器具(medical equipment)进行远程操作而设置的。当由作为手术者(surgeon)的操作者13向远程操作装置1输入应由患者侧装置2执行的动作方案指令时,远程操作装置1经由控制器将动作方案指令发送给患者侧装置2。然后,患者侧装置2响应从远程操作装置1发送的动作方案指令,对安装于机器人臂2a的内窥镜2d、安装于机器人臂2b的手术器具2c(surgical instrument)等医疗器具进行操作。图像处理装置3将利用内窥镜2d拍摄到的术野的图像发送给远程操作装置1等。由此,进行微创手术。
34.患者侧装置2构成对患者4进行手术的接口。患者侧装置2配置在供患者4横躺的手术台5的旁边。患者侧装置2具有多个机器人臂2e,在其中的一个机器人臂2a上安装有内窥镜2d,在其他机器人臂2b上安装有手术器具2c。患者侧装置2包括用于将内窥镜2d安装于机器人臂2a的内窥镜接头6(参照图3)和用于将帷帘12(参照图3)安装于机器人臂2a的帷帘接头7(参照图3)。此外,帷帘接头7也是用于将内窥镜接头6或手术器具2c安装于机器人臂2b的接头。
35.多个机器人臂2e由平台8共同地支承。多个机器人臂2e具有多个关节,在各个关节上设置有包括伺服电机的驱动部和编码器等位置检测器。多个机器人臂2e构成为由经由控制器提供的驱动信号控制,使得安装于机器人臂2e的医疗器具进行期望的动作。
36.平台8由载置在手术室的地面上的定位器9支承。在定位器9中,具有能够沿铅垂方向调整的升降轴的柱部10与基座11连结,所述基座11具备车轮并且能够在地面上移动。
37.在机器人臂2a上,在前端部能够拆装地安装有作为医疗器具的内窥镜2d。内窥镜2d对患者4的体腔内进行拍摄,拍摄到的图像经由图像处理装置3对远程操作装置1输出。作为内窥镜2d,使用能够拍摄三维图像的3d内窥镜或2d内窥镜。在使用患者侧装置2的手术中,机器人臂2e经由留置在患者4的体表的套管针(trocar)将内窥镜2d导入患者4的体内。并且,内窥镜2d配置在手术部位的附近。
38.远程操作装置1构成与操作者13的接口。远程操作装置1是用于供操作者13对安装于机器人臂2e的医疗器具进行操作的装置。即,远程操作装置1构成为能够经由控制器向患者侧装置2发送由操作者13输入的应由手术器具2c及内窥镜2d执行的动作方案指令。远程操作装置1例如设置在手术台5的旁边,以便一边操作主设备(master),一边能清楚地看到
患者4的情况。此外,远程操作装置1例如也能够以无线方式发送动作方案指令,并设置于与设置有手术台5的手术室不同的房间。
39.应由手术器具2c执行的动作方案是指通过手术器具2c的动作(一系列的位置及姿势)及手术器具2c各自的功能而实现的动作的方案。例如,在手术器具2c为把持镊子的情况下,应由手术器具2c执行的动作方案是指末端执行器的腕部的翻滚(roll)旋转位置及俯仰(pitch)旋转位置和进行爪的开闭的动作。另外,在手术器具2c为高频电刀的情况下,应由手术器具2c执行的动作方案可以是指高频电刀的振动动作,具体而言可以是对高频电刀的电流供给。另外,在手术器具2c为圈套器钢丝的情况下,应由手术器具2c执行的动作方案可以是束缚动作及束缚状态的释放动作。另外,也可以是通过向双极或单极供给电流从而烧切手术对象部位的动作。
40.应由内窥镜2d执行的动作方案例如是指内窥镜2d前端的位置及姿势或变焦倍率的设定。
41.远程操作装置1具备操作手柄1a、操作踏板部1b、显示部1c及控制装置1d(参照图2)。
42.操作手柄1a是为了对安装于机器人臂2e的医疗器具进行远程操作而设置的。具体而言,操作手柄1a受理用于操作医疗器具(手术器具2c、内窥镜2d)的由操作者13进行的操作。操作手柄1a沿着水平方向设置有两个。即,两个操作手柄1a中的一方的操作手柄1a由操作者13的右手操作,两个操作手柄1a中的另一方的操作手柄1a由操作者13的左手操作。
43.另外,操作手柄1a配置成从远程操作装置1的后方侧向前方侧延伸。操作手柄1a构成为能够在规定的三维操作区域内移动。即,操作手柄1a构成为能够在上下方向、左右方向及前后方向上移动。
44.如图2所示,远程操作装置1和患者侧装置2在机器人臂2a及机器人臂2b的动作的控制中构成主从型的系统。即,操作手柄1a构成主从型的系统中的主侧的操作部,安装有医疗器具的机器人臂2a及机器人臂2b构成从侧的动作部。而且,当操作者13操作操作手柄1a时,以机器人臂2a的前端部(内窥镜2d)或机器人臂2b的前端部(手术器具2c的末端执行器)追踪操作手柄1a的活动并移动的方式控制机器人臂2a或机器人臂2b的动作。
45.另外,患者侧装置2构成为根据设定的动作倍率控制机器人臂2b的动作。例如,在动作倍率设定为1/2倍的情况下,手术器具2c的末端执行器被控制成移动操作手柄1a的移动距离的1/2的移动距离。由此,能够准确地进行精细的手术。
46.如图1所示,操作踏板部1b包括用于执行与医疗器具相关的功能的多个踏板。多个踏板包括凝固踏板、切断踏板、拍摄踏板及离合踏板。另外,多个踏板由操作者13的脚操作。
47.凝固踏板能够使用手术器具2c进行使手术部位凝固的操作。具体而言,通过操作凝固踏板,从而向手术器具2c施加凝固用的电压,进行手术部位的凝固。切断踏板能够使用手术器具2c进行使手术部位切断的操作。具体而言,通过操作切断踏板,从而向手术器具2c施加切断用的电压,进行手术部位的切断。
48.拍摄踏板用于操作对体腔内进行拍摄的内窥镜2d的位置及姿势。具体而言,拍摄踏板使内窥镜2d的基于操作手柄1a的操作有效。即,在按压拍摄踏板期间,能够利用操作手柄1a操作内窥镜2d的位置及姿势。例如,通过使用左右的操作手柄1a双方,从而操作内窥镜2d。具体而言,通过以左右的操作手柄1a的中间点为中心使左右的操作手柄1a转动,从而内
窥镜2d转动。另外,通过将左右的操作手柄1a一起推入,从而内窥镜2d进入深处。另外,通过一起拉拽左右的操作手柄1a,从而内窥镜2d返回到跟前。另外,通过使左右的操作手柄1a一起上下左右移动,从而内窥镜2d向上下左右移动。
49.离合踏板在暂时切断机器人臂2e与操作手柄1a的操作连接并使手术器具2c的动作停止的情况下使用。具体而言,在离合踏板被操作的期间,即使操作操作手柄1a,患者侧装置2的机器人臂2e也不动作。例如,在通过操作而操作手柄1a来到能够移动的范围的端部附近的情况下,通过操作离合踏板,从而能够暂时切断操作连接,使操作手柄1a返回到中央位置附近。而且,当中止离合踏板的操作时,机器人臂2e与操作手柄1a再次连接,能够在中央附近再次开始操作手柄1a的操作。
50.显示部1c能够显示内窥镜2d拍摄到的图像。显示部1c由镜筒型显示部或非镜筒型显示部构成。镜筒型显示部例如是指窥视型的显示部。另外,非镜筒型显示部是指包括如通常的个人计算机的显示器那样的非窥视型而具有平坦画面的开放型显示部的概念。
51.在安装有镜筒型显示部的情况下,显示利用安装在患者侧装置2的机器人臂2e上的内窥镜2d拍摄到的3d图像。在安装有非镜筒型显示部的情况下,也显示利用设置于患者侧装置2的内窥镜2d拍摄到的3d图像。此外,在安装有非镜筒型显示部的情况下,也可以显示利用设置于患者侧装置2的内窥镜2d拍摄到的2d图像。
52.如图2所示,控制装置1d例如包括具有cpu等运算器的控制部101、具有rom及ram等存储器的存储部102以及图像控制部103。控制装置1d可以由集中控制的单独的控制装置构成,也可以由相互联结地分散控制的多个控制装置构成。
53.控制部101根据操作踏板部1b的切换状态,判定利用操作手柄1a输入的动作方案指令是应由机器人臂2b执行的动作方案指令,还是应由内窥镜2d执行的动作方案指令。然后,控制部101在判断为输入到操作手柄1a的动作方案指令是应由手术器具2c执行的动作方案指令时,对机器人臂2b发送动作方案指令。由此,驱动机器人臂2b,通过该驱动,控制安装于机器人臂2b的手术器具2c的动作。
54.另外,控制部101在判定为输入到操作手柄1a的动作方案指令是应由内窥镜2d执行的动作方案指令时,对机器人臂2a发送该动作方案指令。由此,驱动机器人臂2a,通过该驱动,控制安装于机器人臂2a的内窥镜2d的动作。
55.在存储部102中例如存储有与手术器具2c的种类对应的控制程序,通过控制部101根据安装的手术器具2c的种类读出这些控制程序,从而远程操作装置1的操作手柄1a和/或操作踏板部1b的动作指令能够使各手术器具2c进行适合的动作。
56.图像控制部103将内窥镜2d取得的图像传送给显示部1c。图像控制部103根据需要进行图像的加工修正处理。
57.图像处理装置3构成为:将从内窥镜2d取得的图像传送给远程操作装置1(参照图1),并显示内窥镜2d取得的图像。图像处理装置3根据需要进行从内窥镜2d取得的图像的加工修正处理。具体而言,图像处理装置3包括外部监视器部31。外部监视器部31构成为能够显示内窥镜2d拍摄到的图像。外部监视器部31是通常的个人计算机的显示器这样的具有平坦画面的开放型显示部。
58.(帷帘接头、内窥镜接头及内窥镜的结构)
59.参照图3~图13,说明本发明的一实施方式的帷帘接头7、内窥镜接头6及内窥镜2d
的结构。
60.如图3所示,机器人臂2e为了在清洁区域中使用而由帷帘12覆盖。在此,在手术室中,为了防止手术而切开的部分及医疗设备被病原菌、异物等污染而进行清洁操作。在该清洁操作中,设定清洁区域及作为清洁区域以外的区域的污染区域。手术部位配置在清洁区域。包括操作者13(参照图1)在内的手术团队的成员在手术中要照顾到在清洁区域中仅存在已被杀菌的物体,且在使位于污染区域的物体移动到清洁区域时,对该物体实施灭菌处理。同样地,在包括操作者13在内的手术团队的成员使其手位于污染区域时,在与位于清洁区域的物体直接接触之前,进行手的灭菌处理。在清洁区域中使用的器具由要被进行灭菌处理或者被灭菌处理后的帷帘12覆盖。
61.帷帘12配置在帷帘接头7与机器人臂2a(2b(参照图1))之间。帷帘接头7夹入帷帘12并安装于机器人臂2e(参照图1)。即,帷帘接头7是用于在与机器人臂2e之间夹入帷帘12的接头。
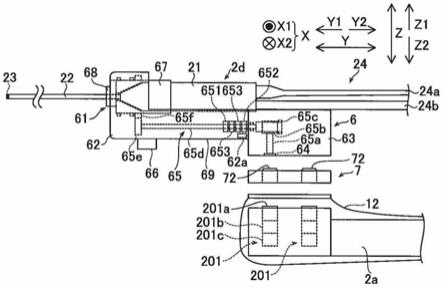
62.在以下的说明中,将内窥镜接头6的安装部63(后述)和内窥镜2d排列的方向设为z方向,将z方向中的内窥镜2d侧及安装部63侧分别设为z1方向(z1侧)及z2方向(z2侧)。另外,将内窥镜接头6的基部62(后述)延伸的方向设为y方向,将y方向中的将内窥镜2d插入内窥镜接头6的方向设为y1方向(y1侧),将y1方向的反方向设为y2方向(y2侧)。另外,将与z方向及y方向正交的方向设为x方向,将x方向中的一侧及另一侧分别设为x1方向(z1侧)及x2方向(x2侧)。
63.内窥镜2d由内窥镜接头6保持为能够旋转。另外,内窥镜2d能够拆装地安装于内窥镜接头6。内窥镜2d包括本体部21、细长形状的插入部22及拍摄部23。另外,内窥镜2d由内窥镜接头6保持为能够以插入部22延伸的方向(y方向)上的旋转轴线c1(参照图5)为中心旋转。旋转轴线c1与插入部22的中心线大致重叠。
64.本体部21具有在y方向上延伸的细长形状。本体部21在一端与插入部22连接,在另一端与线缆24连接。线缆24包括用于发送利用内窥镜2d拍摄到的图像的相机线缆24a和用于在利用内窥镜2d拍摄体腔内时照射光的光缆(light cable)24b。相机线缆24a的直径比光缆24b的直径小。相机线缆24a配置在光缆24b的z1侧。此外,内窥镜2d可以使用通用的内窥镜,也可以使用用于安装在机器人臂2a的专用的内窥镜。
65.插入部22是插入到患者4的体内的部分。插入部22例如具有不易变形的硬度。即,内窥镜2d是硬性内窥镜。插入部22经由配置在患者4的体表的套管针,插入到患者4的体内。在插入部22的前端(与本体部21相反一侧的端部)设置有拍摄部23。由此,拍摄部23配置在患者4的体内,能够拍摄手术部分。
66.拍摄部23能够利用单眼或复眼进行拍摄。即,拍摄部23从多个位置或一个位置拍摄对象。另外,在拍摄部23设置有照明装置。照明装置在拍摄时点亮,并向拍摄对象照射光。
67.如图4及图5所示,内窥镜2d在安装于内窥镜接头6的状态下经由帷帘接头7与机器人手术系统100的机器人臂2a连接。为了使内窥镜2d旋转,机器人臂2a经由帷帘接头7向内窥镜接头6传递动力。具体而言,机器人臂2a具备驱动部201。
68.如图7所示,驱动部201包括卡合凸部201a、电机201b及编码器201c。构成为利用作为驱动源的电机201b使卡合凸部201a以在z方向上延伸的旋转轴线c2为中心转动。编码器201c检测电机201b及卡合凸部201a的旋转位置。为了检测电机201b的旋转位置,编码器
201c适合使用绝对型旋转编码器。
69.如图4及图5所示,帷帘接头7包括基体71和多个驱动传递构件72。驱动传递构件72包括配置在y2侧的多个第一驱动传递构件73和配置在y1侧的多个第二驱动传递构件74。驱动传递构件72能够旋转地设置于基体71。具体而言,驱动传递构件72设置成能够以在z方向上延伸的旋转轴线c3为中心旋转。驱动传递构件72将机器人臂2a的驱动部201的驱动力传递给内窥镜接头6的被驱动构件64。
70.如图4及图5所示,内窥镜接头6具备将内窥镜保持为能够旋转的内窥镜保持部61和安装有内窥镜保持部61的基部62。
71.如图6所示,内窥镜保持部61构成为保持内窥镜2d。即,内窥镜保持部61将内窥镜2d安装于基部62。具体而言,内窥镜保持部61具有保持部本体67和锁定部68。
72.保持部本体67具有圆筒形状。保持部本体67具有供内窥镜2d插入的插入孔(未图示)。插入孔在y方向上贯通保持部本体67。保持部本体67具有用于安装锁定部68的一对卡合部(未图示)。一对卡合部在与y方向正交的方向上突出。保持部本体67配置在锁定部68的y2侧。
73.内窥镜保持部61具有在安装内窥镜2d时与内窥镜2d的被卡合部210卡合的卡合部67c。卡合部67c是与从内窥镜2d的外表面21a突出的凸形状的作为被卡合部210的操作部211卡合,并且在将内窥镜2d插入内窥镜保持部61时的y1方向(插入方向)上使内窥镜保持部61凹陷而成的缺口67d。缺口67d构成为在使卡合部67c与被卡合部210卡合的状态下对内窥镜2d进行定位。因此,内窥镜2d与内窥镜保持部61成为一体并旋转。
74.锁定部68具有供内窥镜2d的本体部21的前端部分插入的插入孔(未图示)。锁定部68构成为供保持部本体67的卡合部(未图示)卡合。
75.如图4、5所示,基部62包括:经由帷帘接头7安装于机器人臂2a的安装部63、设置于安装部63并由机器人臂2a的驱动部201驱动而旋转的被驱动构件64以及将被驱动构件的旋转传递给内窥镜保持部61的传递机构65。
76.如图4所示,安装部63是为了将内窥镜接头6与帷帘接头7能够拆卸地连接而设置。在基部62上安装部63配置在y2侧。在基部62上设置有从安装部63起在y1方向上延伸的延长部69。被驱动构件64设置于安装部63。
77.通过旋转驱动内窥镜接头6的被驱动构件64,从而使内窥镜2d旋转。设置有一个被驱动构件64。在机器人臂2a上设置有4个驱动部201。另外,在帷帘接头7上设置有4个与驱动部201卡合的驱动传递构件72。机器人臂2a的驱动部201的卡合凸部201a(参照图7)与帷帘接头7的驱动传递构件72卡合。帷帘接头7的驱动传递构件72与内窥镜接头6的被驱动构件64的卡合凸部64a卡合。由此,利用机器人臂2a的驱动部201经由帷帘接头7旋转驱动被驱动构件64。
78.如图7所示,传递机构65构成为:通过将被驱动构件64的旋转传递给内窥镜保持部61,从而使内窥镜2d绕旋转轴线c1(参照图5)旋转。传递机构65具有轴65a、斜齿轮65b、圆筒蜗轮65c、轴65d、齿轮65e及齿轮65f。轴65a配置成在z方向上直线地延伸。被驱动构件64与轴65a的z2侧的端部连接。斜齿轮65b与轴65a的z1侧的端部连接。斜齿轮65b与圆筒蜗轮65c连接(啮合)。轴65d配置成在y方向上直线地延伸。圆筒蜗轮65c与轴65d的y2侧的端部连接。齿轮65e与轴65d的y1侧的端部连接。即,齿轮65e与圆筒蜗轮65c同轴地设置。齿轮65e与齿
轮65f连接(啮合)。齿轮65f设置于内窥镜保持部61。由此,由于内窥镜保持部61伴随着机器人臂2a的驱动部201旋转而旋转,所以内窥镜2d旋转。此外,轴65d是驱动传递轴的一例。
79.在传递机构65中,构成为使被驱动构件64的旋转减速并传递给内窥镜保持部61。即,内窥镜保持部61(内窥镜2d)的旋转量比被驱动构件64的旋转量小。详细而言,构成为:驱动部201的旋转由斜齿轮65b及圆筒蜗轮65c增速为大致1.6倍并传递给轴65d。即,轴65d的旋转量比被驱动构件64的旋转量大。另一方面,构成为:轴65d的旋转由齿轮65e和齿轮65f减速为大致6/11倍并传递给内窥镜保持部61。即,内窥镜保持部61(内窥镜2d)的旋转量比轴65d的旋转量小。整体观察时,传递机构65构成为使被驱动构件64的旋转减速并传递给内窥镜保持部61。因此,内窥镜保持部61(内窥镜2d)的旋转量比被驱动构件64的旋转量小。
80.如图5所示,内窥镜接头6构成为通过保持向y1侧垂下的线缆24(参照图1),从而将其收纳。线缆保持部66由在内部保持线缆24的夹持机构构成。即,线缆保持部66通过保持线缆24,从而将线缆24配置在期望的配置位置。
81.在此,如图3所示,内窥镜接头6(经由保持帷帘12的帷帘接头7)与机器人手术系统100的机器人臂2a连接。内窥镜接头6具备内窥镜保持部61和基部62。内窥镜保持部61将内窥镜2d保持为能够旋转。如图3所示,基部62包括安装部63、被驱动构件64及传递机构65(参照图7)。安装部63(经由帷帘接头7)安装于机器人臂2a(的驱动部201(参照图4))。如图7所示,被驱动构件64设置于安装部63,并(经由帷帘接头7)由机器人臂2a的驱动部201驱动而旋转。传递机构65使被驱动构件64的旋转减速并传递给内窥镜保持部61。如图9所示,传递机构65包括:通过被驱动构件64的旋转而旋转的轴65d、与轴65d一体地旋转的第一联结构件651以及能够相对于轴65d旋转地设置且与第一联结构件651联结并旋转的第二联结构件652。基部62(的延长部69)包括通过与第二联结构件652抵接从而使轴65d的旋转停止的止动部62a。
82.在本实施方式的内窥镜接头6中,传递机构65包括:通过被驱动构件64的旋转而旋转的轴65d、与轴65d一体地旋转的第一联结构件651以及能够相对于轴65d旋转地设置且与第一联结构件651联结并旋转的第二联结构件652。另外,基部62(的延长部69)包括通过与第二联结构件652抵接从而使轴65d的旋转停止的止动部62a。由此,通过使被驱动构件64旋转直到与第一联结构件651联结并旋转的第二联结构件652与止动部62a抵接,从而能够使被驱动构件64旋转到成为机械端位(机械的动作极限)并停止。因此,在被驱动构件64上预先设定有旋转角度范围(一侧的机械端位与另一侧的机械端位之间)中的原点的情况下,能够基于设定的旋转角度范围与原点的关系,使配置在机械端位的被驱动构件64配置于原点。即,在具备使被驱动构件64旋转驱动的驱动部201的机器人臂2a中,能够将使被驱动构件64配置于原点时的驱动部201的旋转位置设定为原点(能够使驱动部201的旋转位置配置于原点)。具体而言,在本实施方式中,如后所述,当将逆时针设为+,并将顺时针设为
‑
时,被驱动构件64及驱动部201(的卡合凸部201a)的旋转角度范围为大致+412度至大致
‑
412度即大致824度。因此,通过从被驱动构件64及驱动部201(的卡合凸部201a)配置在机械端位的状态起使机器人臂2a的驱动部201(的卡合凸部201a)旋转大致412度,从而能够使被驱动构件64及驱动部201(的卡合凸部201a)配置在0度的位置(原点)。另外,通过使被驱动构件64配置于原点,从而能够使被传递被驱动构件64的旋转的内窥镜保持部61所保持的内窥镜2d也配置于原点。结果,能够提供在将内窥镜2d安装于机器人臂2a时能够将内窥镜2d及机器
人臂2a的驱动部201配置在各自的旋转角度范围的原点的内窥镜接头6。
83.详细而言,如图11所示,第一联结构件651及第二联结构件652分别具有从y方向观察时形成有供轴65d贯通的贯通孔的圆环形状。即,第一联结构件651及第二联结构件652形成为环状。
84.另外,如图12所示,在轴65d上形成有键槽65g。另外,如图11所示,在第一联结构件651上形成有与键槽65g卡合的键651a。由此,第一联结构件651固定于轴65d,并与轴65d一体地旋转。此外,如图12所示,在键槽65g的y1侧,形成有从轴65d向轴65d的周向外侧突出的限制部655。限制部655从y方向观察形成为圆环状。如图10所示,第一联结构件651的向y1方向的移动由限制部655限制。由此,第一联结构件651更可靠地与轴65d一体地旋转。
85.另外,如图10及图11所示,第一联结构件651配置在轴65d的轴向(y方向)上的一侧(y1侧),并且包括向轴向(y方向)上的另一侧(y2侧)突出以便使第二联结构件652联结并旋转的第一联结用凸部651b。第二联结构件652配置在轴向(y方向)上的另一侧(y2侧),并且包括向轴向(y方向)上的一侧(y1侧)突出以便与第一联结构件651联结并旋转的第二联结用凸部652a。
86.由此,能够利用第一联结构件651的第一联结用凸部651b和第二联结构件652的第二联结用凸部652a,使第二联结构件652与第一联结构件651容易地联结并旋转。
87.另外,如图11所示,在第一联结构件651上,第一联结用凸部651b和键651a设置于从y方向观察时具有圆环形状的第一联结构件651的周向上的彼此相反侧的位置(相差大致180度的位置)。
88.另外,如图10所示,第二联结构件652包括向轴65d的径向上的外侧突出并且用于使轴65d的旋转停止的第一止动用凸部652b。如图13所示,止动部62a包括向轴65d突出并且通过第二联结构件652旋转从而与第二联结构件652的第一止动用凸部652b抵接的第二止动用凸部62b。
89.由此,通过第二联结构件652的第一止动用凸部652b与止动部62a的第二止动用凸部62b抵接,从而能够使第二联结构件652的旋转停止。结果,能够使被驱动构件64在机械端位停止。
90.另外,如图11所示,在第二联结构件652上,第二联结用凸部652a和第一止动用凸部652b设置于从y方向观察时具有圆环形状的第二联结构件652的周向上的彼此相反侧的位置(相差大致180度的位置)。
91.另外,如图10所示,在第二联结构件652的y2侧,设置有用于限制第二联结构件652的y方向上的位置的限制构件654。限制构件654具有从y方向观察时形成有供轴65d贯通的贯通孔的圆环形状。即,第二联结构件652和第三联结构件653(后述)通过在y方向上由第一联结构件651和限制构件654夹着,从而y方向上的位置受到限制。
92.另外,传递机构65包括在轴向(y方向)上设置于第一联结构件651与第二联结构件652之间的第三联结构件653。如图11所示,第三联结构件653具有向轴向(y方向)上的一侧(y1侧)突出以便与第一联结构件651联结并旋转的第三联结用凸部653a和向轴向(y方向)上的另一侧(y2侧)突出以便与第二联结构件652联结并旋转的第四联结用凸部653b。
93.由此,能够利用第三联结构件653的第三联结用凸部653a使第三联结构件653与第一联结构件651联结并旋转。另外,能够利用第四联结用凸部653b使第三联结构件653与第
二联结构件652联结并旋转。另外,通过将第三联结构件653设置成在第一联结构件651与第二联结构件652之间与第一联结构件651及第二联结构件652联结并旋转,从而能够与设置第三联结构件653对应地,增大与第一联结构件651联结并旋转的第二联结构件652与止动部62a抵接为止的被驱动构件64的旋转量。结果,能够增大被驱动构件64的旋转角度范围。
94.另外,第三联结构件653具有从y方向观察时形成有供轴65d贯通的贯通孔的圆环形状。即,第三联结构件653与第一联结构件651及第二联结构件652同样地形成为环状。
95.另外,在第三联结构件653上,第三联结用凸部653a和第四联结用凸部653b设置于从y方向观察时具有圆环形状的第三联结构件653的周向上的彼此相反侧的位置(相差大致180度的位置)。
96.另外,第三联结构件653以沿着轴向(y方向)排列的方式设置有多个(两个)。多个(两个)第三联结构件653构成为相互联结并旋转。更详细而言,通过轴向(y方向)上的一侧(y1方向侧)的第三联结构件653的第四联结用凸部653b与轴向(y方向)上的另一侧(y2方向侧)的第三联结构件653的第三联结用凸部653a抵接(卡合),从而能够使两个第三联结构件653相互联结并旋转。
97.由此,能够与第三联结构件653的个数对应地增大与第一联结构件651联结并旋转的第二联结构件652与止动部62a抵接为止的被驱动构件64的旋转量。结果,能够容易地增大被驱动构件64的旋转角度范围。另外,在本实施方式中,通过将两个第三联结构件653的形状设为相互相同,从而降低制造成本。
98.另外,被驱动构件64构成为能够在大于360度的角度范围内旋转。换句话说,驱动部201(的卡合凸部201a)构成为能够在大于360度的角度范围内旋转。
99.在此,在被驱动构件64的旋转角度范围大于360度的情况下,由于如规定的位置及从规定的位置旋转了360度的位置等,在多个旋转位置处存在被驱动构件64朝向相同的方向的情况,所以有时不能利用编码器201c识别驱动部201的卡合凸部201a的旋转位置。因此,能够有效地使用在将内窥镜2d安装于机器人臂2a时能够将内窥镜2d及机器人臂2a的驱动部201配置在各自的旋转角度范围的原点的内窥镜接头6。
100.具体而言,如图8所示,被驱动构件64构成为能够旋转到从原点(图8的(a)的状态)起从z2侧观察时向顺时针及逆时针分别旋转大致412度而成的位置(机械端位)。即,被驱动构件64具有824度的旋转角度范围。即,由于驱动部201(的卡合凸部201a)向顺时针及逆时针旋转360度以上(一周以上),所以不能够利用编码器201c判别驱动部201(的卡合凸部201a)配置于原点的情况、配置在从原点向顺时针旋转360度而成的位置的情况以及配置在从原点向逆时针旋转360度而成的位置的情况。在图8的(b)中,示出使被驱动构件64从z2侧观察时向逆时针旋转大致412度而成的位置(机械端位)。
101.另外,内窥镜保持部61构成为:以内窥镜2d的旋转位置与被驱动构件64的旋转位置成为一定的关系的方式将内窥镜2d保持为能够旋转。
102.由此,由于能够在使被驱动构件64配置于原点时,使内窥镜2d的旋转位置也配置于原点等特定的位置,所以能够在将内窥镜2d安装于机器人臂2a时,使内窥镜2d及机器人臂2a的驱动部201可靠地配置在各自的旋转角度范围的原点。
103.具体而言,如上所述,内窥镜保持部61以内窥镜保持部61的缺口67d与内窥镜2d的操作部211卡合的方式保持内窥镜2d。而且,内窥镜保持部61构成为在缺口67d朝向下侧(z2
侧)的情况下成为原点。内窥镜保持部61构成为能够旋转到从原点起从y1侧观察时向顺时针及逆时针分别旋转360度而成的位置。即,被驱动构件64的大致412度的旋转角度范围与内窥镜2d的360度的旋转角度范围对应。换句话说,驱动部201(的卡合凸部201a)的大致412度的旋转角度范围与内窥镜2d的360度的旋转角度范围对应。
104.另外,如图2所示,在本实施方式的机器人手术系统100中,具备机器人臂2a、内窥镜接头6及控制部202。控制部202控制机器人臂2a的驱动部201。控制部202构成为进行如下控制:基于轴65d的旋转停止时的机器人臂2a的驱动部201(的卡合凸部201a)的旋转位置,使驱动部201(的卡合凸部201a)的旋转位置配置于原点。
105.由此,能够通过控制部202的控制,基于被驱动构件64配置在机械端位的情况下的机器人臂2a的驱动部201的旋转位置,使驱动部201的旋转位置配置于原点。即,在驱动部201(的卡合凸部201a)上预先设定有旋转角度范围(一侧的机械端位与另一侧的机械端位之间)内的原点的情况下,通过基于设定的旋转角度范围与原点的关系,以使配置在机械端位的驱动部201(的卡合凸部201a)配置于原点的方式使驱动部201旋转,从而能够使驱动部201的旋转位置配置于原点。具体而言,在本实施方式中,如上所述,当将顺时针设为+,并将逆时针设为
‑
时,驱动部201(的卡合凸部201a)的旋转角度范围成为大致+412度至大致
‑
412度即大致824度。因此,通过从被驱动构件64及驱动部201(的卡合凸部201a)配置在机械端位的状态起使机器人臂2a的驱动部201(的卡合凸部201a)旋转大致412度,从而能够使被驱动构件64及驱动部201(的卡合凸部201a)配置在0度的位置(原点)。另外,通过使被驱动构件64配置于原点,从而能够使被传递被驱动构件64的旋转的内窥镜保持部61所保持的内窥镜2d也配置于原点。结果,能够提供在将内窥镜2d安装于机器人臂2a时能够将内窥镜2d及机器人臂2a的驱动部201配置在各自的旋转角度范围的原点的机器人手术系统100。
106.(内窥镜接头的旋转位置调整方法)
107.参照图14说明本发明的一实施方式的内窥镜接头6的旋转位置调整方法。
108.如图14所示,内窥镜接头6的旋转位置调整方法具备:准备内窥镜接头6的工序(s1)、使第一联结构件651与轴65d一体地旋转的工序(s3)、使轴65d的旋转停止的工序(s4)以及使驱动部201(的卡合凸部201a)的旋转位置配置于原点的工序(s6)。准备内窥镜接头6的工序(s1)是如下工序:准备内窥镜接头6,所述内窥镜接头6具备将内窥镜2d保持为能够旋转的内窥镜保持部61和基部62,基部62包括:(经由帷帘接头7)安装于机器人臂2a(的驱动部201)的安装部63、设置于安装部63并(经由帷帘接头7)由机器人臂2a的驱动部201驱动而旋转的被驱动构件64以及使被驱动构件64的旋转减速并传递给内窥镜保持部61的传递机构65。使第一联结构件651与轴65d一体地旋转的工序(s3)是如下工序:通过在将内窥镜接头6安装于机器人臂2a后,使被驱动构件64旋转,从而使第一联结构件651与通过被驱动构件64的旋转而旋转的轴65d一体地旋转。使轴65d的旋转停止的工序(s4)是如下工序:通过使轴65d旋转并与基部62包含的止动部62a抵接,从而使轴65d的旋转停止。使驱动部201(的卡合凸部201a)的旋转位置配置于原点的工序(s6)是如下工序:在使轴65d的旋转停止的工序(s4)之后,基于轴65d的旋转停止时的机器人臂2a的驱动部201(的卡合凸部201a)的旋转位置,使驱动部201(的卡合凸部201a)的旋转位置配置于原点。
109.在本实施方式的内窥镜接头6的旋转位置调整方法中,通过在将内窥镜接头6安装于机器人臂2a后,(利用驱动部201)使被驱动构件64旋转,从而使第一联结构件651与轴65d
一体地旋转,并且使第二联结构件652与第一联结构件651联结并旋转,通过使第二联结构件652的第一止动用凸部652b与止动部62a的第二止动用凸部62b抵接,从而使轴65d的旋转停止。由此,能够使被驱动构件64的旋转位置配置在机械端位(机械的动作极限)。另外,在本实施方式的内窥镜接头6的旋转位置调整方法中,在使轴65d的旋转停止后,基于轴65d的旋转停止时的机器人臂2a的驱动部201(的卡合凸部201a)的旋转位置,使驱动部201(的卡合凸部201a)的旋转位置配置于原点。由此,能够基于被驱动构件64配置在机械端位的情况下的机器人臂2a的驱动部201(的卡合凸部201a)的旋转位置,使驱动部201的旋转位置配置于原点。即,通过以使配置在机械端位的被驱动构件64配置于原点的方式使驱动部201旋转,从而能够使驱动部201的旋转位置配置于原点,并且能够使被传递被驱动构件64的旋转的内窥镜保持部61所保持的内窥镜2d也配置于原点。结果,能够在将内窥镜2d安装于机器人臂2a时,使内窥镜2d和机器人臂2a的驱动部201配置在各自的旋转角度范围的原点。
110.详细而言,首先,在步骤s1中,进行准备内窥镜接头6的工序,所述内窥镜接头6具备内窥镜保持部61和包括安装部63、被驱动构件64及传递机构65在内的基部62。
111.接着,在步骤s2中,进行将内窥镜接头6经由帷帘接头7安装于机器人臂2a的工序。在此,在将内窥镜接头6经由帷帘接头7与机器人臂2a的驱动部201连接时,被驱动构件64的旋转角度范围中的位置(旋转位置)不明确(随机)。因此,由于机器人臂2a的驱动部201的卡合凸部201a的旋转位置也成为随机,所以需要使内窥镜2d和机器人臂2a的驱动部201配置在各自的旋转角度范围的原点。
112.接着,在步骤s3中,进行通过使被驱动构件64旋转从而使第一联结构件651与轴65d一体地旋转的工序。具体而言,通过利用机器人臂2a的驱动部201使被驱动构件64旋转驱动,从而使被驱动构件64的旋转增速并使轴65d旋转。由此,固定于轴65d的第一联结构件651与轴65d一体地旋转。
113.接着,在步骤s4中,进行如下工序:通过使第二联结构件652经由第三联结构件653与第一联结构件651联结并旋转,并且与止动部62a抵接,从而使轴65d的旋转停止。
114.具体而言,通过第一联结构件651与轴65d一体地旋转,从而第一联结构件651的第一联结用凸部651b与y1侧的第三联结构件653的第三联结用凸部653a抵接,y1侧的第三联结构件653与第一联结构件651开始一起旋转。然后,当y1侧的第三联结构件653的第四联结用凸部653b与y2侧的第三联结构件653的第三联结用凸部653a抵接时,y2侧的第三联结构件653与第一联结构件651及y1侧的第三联结构件653开始一起旋转。然后,当y2侧的第三联结构件653的第四联结用凸部653b与第二联结构件652的第二联结用凸部652a抵接时,第二联结构件652与第一联结构件651、y1侧的第三联结构件653及y2侧的第三联结构件653开始一起旋转。然后,当第二联结构件652的第一止动用凸部652b与止动部62a的第二止动用凸部62b抵接时,通过阻碍一起旋转的第一联结构件651、y1侧的第三联结构件653、y2侧的第三联结构件653及第二联结构件652的旋转,从而旋转停止。
115.此外,在步骤s4中,使驱动部201(的卡合凸部201a)以规定的旋转速度旋转。即,使被驱动构件64以规定的旋转速度旋转。然后,当被驱动构件64的旋转位置接近与机械端位相同的位置(在向逆时针旋转的情况下为大致+52度的位置,在向顺时针旋转的情况下为大致
‑
52度的位置)附近时,使被驱动构件64的旋转速度暂时下降。然后,在被驱动构件64的旋转不停止的情况下(被驱动构件64的旋转位置不是机械端位的情况下),使被驱动构件64的
旋转速度再次上升到规定的旋转速度,并使旋转继续。例如通过利用驱动部201的编码器201c检测驱动部201的电机201b的旋转位置,从而间接地检测被驱动构件64的旋转位置。
116.接着,在步骤s5中,进行使驱动部201停止的工序,所述驱动部201是使被驱动构件64旋转的驱动部。
117.即,在本实施方式的内窥镜接头6的旋转位置调整方法中,在使轴65d的旋转停止的工序(s4)之后且使驱动部201配置于原点的工序(s6)之前,具备将使被驱动构件64旋转的驱动部201停止的工序(s5)。驱动部201包括电机201b。而且,使驱动部201停止的工序(s5)是基于电机201b的输出电流值使驱动部201停止的工序。
118.在此,在第二联结构件652与止动部62a抵接而轴65d的旋转停止后,电机201b的驱动继续的情况下,电机201b的输出电流值急剧上升。因此,能够基于电机201b的输出电流值,容易地判别第二联结构件652与止动部62a抵接而轴65d的旋转停止。
119.另外,使驱动部201停止的工序(s5)也是基于电机201b的输出电流值和电机201b的旋转位置使驱动部201停止的工序。
120.由此,与仅基于电机201b的输出电流值的情况相比,能够高精度地判别第二联结构件652与止动部62a抵接而轴65d的旋转停止。
121.此外,利用驱动部201的编码器201c检测电机201b的旋转位置,能够基于电机201b的旋转位置不变化这一情况,容易地判别第二联结构件652与止动部62a抵接而轴65d的旋转停止。
122.接着,在步骤s6中,进行如下工序:基于轴65d的旋转停止时的驱动部201的旋转位置,使驱动部201的旋转位置配置于原点。
123.使驱动部201配置于原点的工序(s6)是通过使驱动部201反向旋转规定的角度从而使驱动部201配置于原点的工序。
124.由此,在使轴65d的旋转停止的工序(s6)中,通过使配置在机械端位的驱动部201向使第一联结构件651与轴65d一体地旋转的工序(s3)及使轴65d的旋转停止的工序(s6)中的驱动部201的旋转方向的反方向旋转,从而能够容易地使驱动部201配置在位于旋转角度范围的任意位置的原点。
125.具体而言,在被驱动构件64的旋转位置配置在机械端位的状态下,利用驱动部201使被驱动构件64向使轴65d的旋转停止的工序中的旋转方向的反方向,旋转从机械端位到原点的角度(大致412度)。由此,将被驱动构件64的旋转位置配置于原点。然后,控制部202将被驱动构件64的旋转位置配置于原点的状态下的机器人臂2a的驱动部201的旋转位置设定为原点。由此,能够将内窥镜2d及机器人臂2a的驱动部201配置(初始化)在各自的旋转角度范围的原点。
126.[变形例]
[0127]
应该认为,本次所公开的实施方式在所有的方面都是例示而不是限制性的内容。本发明的范围不是由上述实施方式的说明来示出,包括与权利要求书等同的意思以及范围内的所有变更(变形例)。
[0128]
例如,在上述实施方式中,示出将使驱动部201停止的工序(s6)构成为基于电机201b的输出电流值和电机201b的旋转位置使驱动部201停止的例子,但本发明不限于此。在本发明中,也可以将使驱动部停止的工序构成为:仅基于电机的输出电流值,使驱动部停
止。另外,也可以将使驱动部停止的工序构成为:仅基于电机的旋转位置,使驱动部停止。
[0129]
另外,在上述实施方式中,示出被驱动构件64构成为能够在大于360度的角度范围内旋转的例子,但本发明不限于此。在本发明中,被驱动构件也可以构成为能够在小于360度的角度范围内旋转。
[0130]
另外,在上述实施方式中,示出在轴向(y方向)上设置于第一联结构件651与第二联结构件652之间并具有与第一联结构件651联结并旋转的第三联结用凸部653a和与第二联结构件652联结并旋转的第四联结用凸部653b的第三联结构件653以沿着轴向(y方向)排列的方式设置有多个(两个)的例子,但本发明不限于此。在本发明中,在轴向上设置于第一联结构件与第二联结构件之间并具有与第一联结构件联结并旋转的第三联结用凸部和与第二联结构件联结并旋转的第四联结用凸部的第三联结构件可以以沿着轴向排列的方式设置有三个以上,也可以仅设置有一个。
[0131]
另外,在上述实施方式中,示出传递机构65构成为包括在轴向(y方向)上设置于第一联结构件651与第二联结构件652之间并具有与第一联结构件651联结并旋转的第三联结用凸部653a和与第二联结构件652联结并旋转的第四联结用凸部653b的第三联结构件653的例子,但本发明不限于此。在本发明中,传递机构也可以构成为不包括第三联结构件。
[0132]
另外,在上述实施方式中,示出构成为使第二联结构件652包括向轴65d的径向上的外侧突出并且用于使轴65d的旋转停止的第一止动用凸部652b,并且止动部62a包括向轴65d突出并且通过第二联结构件652旋转从而与第二联结构件652的第一止动用凸部652b抵接的第二止动用凸部62b的例子,但本发明不限于此。在本发明中,也可以构成为:使第二联结构件包括向驱动传递轴的轴向上的一侧突出并且用于使驱动传递轴的旋转停止的第一止动用凸部。在该情况下,与第一止动用凸部向驱动传递轴的径向上的外侧突出以便止动部的第二止动用凸部与第二联结构件的第一止动用凸部抵接的情况相比,需要增大向驱动传递轴突出的突出量。
[0133]
另外,在上述实施方式中,示出在第一联结构件651上,第一联结用凸部651b和键651a设置于从y方向观察时具有圆环形状的第一联结构件651的周向上的彼此相反侧的位置(相差大致180度的位置)的例子,但本发明不限于此。在本发明中,在第一联结构件上,第一联结用凸部和键也可以不设置于从y方向观察时具有圆环形状的第一联结构件的周向上的彼此相反侧的位置。同样地,在上述实施方式中,示出在第二联结构件652上,第二联结用凸部652a和第一止动用凸部652b设置于从y方向观察时具有圆环形状的第二联结构件652的周向上的彼此相反侧的位置(相差大致180度的位置)的例子,但本发明不限于此。在本发明中,在第二联结构件上,第二联结用凸部和第一止动用凸部也可以不设置于从y方向观察时具有圆环形状的第二联结构件的周向上的彼此相反侧的位置。另外,同样地,在上述实施方式中,示出在第三联结构件653上,第三联结用凸部653a和第四联结用凸部653b设置于从y方向观察时具有圆环形状的第三联结构件653的周向上的彼此相反侧的位置(相差大致180度的位置)的例子,但本发明不限于此。在本发明中,在第三联结构件上,第三联结用凸部和第四联结用凸部也可以不设置于从y方向观察时具有圆环形状的第三联结构件的周向上的彼此相反侧的位置。
[0134]
另外,在上述实施方式中,示出在将内窥镜安装于机器人臂时使内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点的例子,但本发明不限于此。在本发明中,也
可以在将内窥镜安装于机器人臂时以外(例如,在将内窥镜安装于机器人臂后等时想使内窥镜及机器人臂的驱动部再次配置在各自的旋转角度范围的原点的情况(想再次初始化的情况))使内窥镜及机器人臂的驱动部配置在各自的旋转角度范围的原点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1