用于评估姿态控制能力的装置及方法与流程
1.本发明关于一种评估受试者的姿势控制能力的装置及方法,特别是关于一种自动化评估该受试者的姿势控制能力的装置及方法。
背景技术:
2.脑中风患者由于半侧偏瘫,影响了躯干及肢体的肌力、动作功能及平衡能力,这些都可能影响中风患者坐起及站立的表现。所以恢复坐姿平衡、站姿平衡及由坐到站的肢体功能,不但是中风患者的复原目标,更是未来恢复走路能力的基础。
3.静态坐姿康复的目的是让中风患者借助练习坐姿平衡训练来重建稳定的坐姿以及坐姿平衡能力。由于中风患者的患侧肢体无力且姿势控制能力差,使他们失去重心转移能力而无法达成肢体平衡。坐姿康复是中风患者站立的基础,当中风患者能坐稳后,才能练习站立。
4.静态站姿康复的目的是让中风患者借助练习站姿平衡能力来重建稳定的站姿以及站姿平衡能力。由于站姿平衡是安全行走的基础,成功地重建站姿平衡能力,让中风患者处于站立姿势时能维持躯干的稳定度,使其它肢体可自由动作且身体重心得以转移,以便在站姿下执行各类功能性的活动。
5.一直以来,中风病患的康复表现评量,特别是对病患最基本也最重要的站立姿态、坐立姿态、以及平躺姿态变换等表现,皆会借助特定的量表来评估。以此类评估量表进行评估时,康复医师、物理治疗师、职能治疗师或是康复护理师等医事人员的常用作法是,依照自身对病患病症的了解以及治疗康复的经验来判断并给予评价。一般来说,医事人员对病患躯干或肢体姿态维持表现所进行的评估,多数还是定性式的评断结果,较缺乏定量性的评断结果。
6.此外,中风患者需要根据评估结果拟定的一套康复训练计划,让他们可以循序渐进地恢复坐起及站立能力。通过康复训练计划,病患得以加强肌肉的力量、协调性和耐久性,产生对抗重力(即反地心引力,如站立、举手等)的动作,及重拾平衡技巧,在坐姿及站姿下都能保持身体重心而不失衡。
7.为了在评估中风患者康复表现时提供定性及定量的评断结果,同时根据此评断结果拟定复建训练计划,需要一种更精准的康复成效评量,以提供中风病患更妥切的治疗方法与训练计划。
8.本公开的申请人鉴于现有技术中的不足,经过悉心试验与研究,并一本锲而不舍的精神,终构思出本案,且能够克服先前技术的不足,以下为本公开的简要说明。
技术实现要素:
9.为了与熟知定性式的康复评断方式相辅,本发明提供一种评估装置及方法,其使用运动传感器来感测中风病患于站立姿态、坐立姿态、平躺姿态及侧躺姿态等姿态时的躯干及肢体姿态的变动状态,并借助所感测到的运动数据来定量分析病患的站姿、坐姿、躺姿
等姿态的康复成效。
10.本公开的一个构思在于提供一种用于评估受试者的姿态控制能力的装置,包括感测单元、数据库及处理器。该感测单元包含对应地配置在该受试者的多个身体部位上的多个运动传感器,用以产生多个感测数据,其中各该感测数据包括静态感测数据及动态感测数据。该数据库用于储存多个参考身体姿态下各该身体部位的姿态维持参考值。该处理器被配置为接收来自该感测单元的该多个感测数据以及来自该数据库的该姿态维持参考值,且包含姿态确定运算单元及姿态控制能力评估运算单元,其中该姿态确定运算单元被配置为将该多个感测数据中的该多个静态感测数据形成身体姿态组态,以确定该受试者处于何特定静态身体姿态,且该姿态控制能力评估运算单元被配置为处理各该动态感测数据以获得该多个身体部位的各该身体部位的姿态维持参数,并将各该姿态维持参数与该特定静态身体姿态下对应的各该身体部位的该姿态维持参考值进行比较,以产生姿态控制能力评估结果。
11.本公开的另一构思在于提供一种用于评估受试者的姿态控制能力的方法,包括以下步骤:将多个运动传感器对应地配置在该受试者的多个身体部位上,以产生多个感测数据,其中各该感测数据包括静态感测数据及动态感测数据;根据该多个静态感测数据执行姿态确定程序,以确定该受试者处于何特定静态身体姿态;以及执行姿态控制能力评估程序,包括处理该动态感测数据以获得相应身体姿态下,各该身体部位的姿态维持参数;以及将该姿态维持参数与该相应身体姿态下各该身体部位的姿态维持参考值进行比较,以产生姿态控制能力评估结果。
12.本公开的另一构思在于提供一种用于评估受试者的姿态控制能力的方法,包括以下步骤:将多个运动传感器对应地配置在该受试者的多个身体部位上,以产生多个动态感测数据;以及在特定静态身体姿态下,执行姿态控制能力评估程序,包括处理该动态感测数据以获得相应身体姿态下,各该身体部位的姿态维持参数;以及将该姿态维持参数与该相应身体姿态下各该身体部位的姿态维持参考值进行比较,以产生姿态控制能力评估结果。
13.本发明的其他目的和优点可以从本发明所揭露的技术特征中得到进一步的了解。为让本发明的上述和其他目的、特征和优点能更明显易懂,下文特举实施例并配合所附图式,作详细说明如下。
附图说明
14.本公开的内容借助下列附图的详细说明,使得更深入地了解︰
15.图1是本发明的姿态控制评量装置的示意图;
16.图2a显示坐立姿态的运动传感器配置以及所测量的加速度值或角度值;
17.图2b显示站立姿态的运动传感器配置以及所测量的加速度值或角度值;
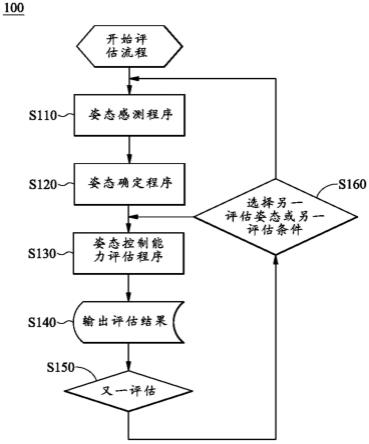
18.图3是本发明的姿态控制评量方法的流程图;
19.图4a显示坐立姿态组态定义的侧视图;
20.图4b显示坐立姿态组态定义的前视图;
21.图5a显示扶持站立姿态组态定义的侧视图;
22.图5b显示扶持站立姿态组态定义的前视图;
23.图6a显示站立姿态组态定义的侧视图;
24.图6b显示站立姿态组态定义的前视图;
25.图7a显示左脚单脚站立姿态组态定义的侧视图;
26.图7b显示左脚单脚站立姿态组态定义的前视图;
27.图8a显示右脚单脚站立姿态组态定义的侧视图;
28.图8b显示右脚单脚站立姿态组态定义的前视图;
29.图9a显示平躺姿态组态定义的侧视图;
30.图9b显示平躺姿态组态定义的俯视图;
31.图10a显示左侧躺姿态组态定义;
32.图10b显示右侧躺姿态组态定义;
33.图11a是坐立姿态康复成效评价;以及
34.图11b是站立姿态康复成效评价。
具体实施方式
35.本公开所提出的发明将可由以下的实施例说明而得到充分了解,使得所属技术领域中的技术人员可以据以完成之,然而本公开的实施并不因下列实施例而被限制其实施型态,所属技术领域中的技术人员仍可依据除既公开的实施例的精神,推演出其他实施例,该等实施例皆当属于本发明的范围。
36.有关本发明前述及其他技术内容、特点与功效,在以下配合参考附图的多个实施例的详细说明中,将可清楚地呈现。虽然本公开内容中的实施例以中风病患作为本发明的姿态控制评量装置1的受试者,然而,本发明的姿态控制评量装置1可适用于任何需要被评估的受试者,因此本公开内容中所使用的用语“受试者”包括但不限于健康受试者、病患、伤员或是行动障碍者。
37.对于中风病患的康复状态,一般会依据表一“中风病患姿势控制评估量表(the postural assessment scale for stroke patients)”来评估中风病人的平衡及行动能力,包括维持身体姿势(譬如坐姿、站姿及躺姿等姿态)的能力,以及在此等不同身体姿势间互相变换的能力。
38.本发明中所使用的用语“评估内容”指用于评估受试者姿势控制能力的量表,特别是用于评估中风病患姿势控制能力的量表,除了表一“中风病患姿势控制评估量表”之外,也包括其他的评量表格,例如,表二:美国国家卫生院脑中风评估表(national institutes of health stroke scale,nihss)的第5项(上肢运动功能)及第6项(下肢运动功能)。
39.表一:中风病患姿势控制评估量表
40.(the postural assessment scale for stroke patients)
41.评估姿态:
[0042][0043][0044]
表二:美国团家卫生院脑中风评估表
[0045]
national institutes of health(nih)stroke scale
[0046][0047]
[0048][0049]
康复科医师、物理治疗师、康复护理师等医事人员依据“中风病患姿势控制评估量表”对中风病患进行康复状态评估时,会以目视的方式来判断中风病患处于此评估量表中的何种姿势(即坐姿、站姿或其他身体姿态等评估项目),而此等评估项目中的评估条件包括可维持该种身体姿势的时间长短、以及需要协助的程度。至于身体姿势的维持成效,或是姿势维持的表现是否是合格,则是依据物理治疗师等医事人员的主观认知以定性地评量方式来评价。
[0050]
相对于上述熟知的医事人员所操作的中风病患康复状态的评量方法,本发明的技术特征则是使用运动感测装置,根据“中风病患姿势控制评估量表”的评估流程,先感测出中风病患目前的身体姿态,并通过所感知的身体姿态自动对应地选定如“中风病患姿势控制评估量表”中要评估的评估项目(包括多个坐姿评估项目及多个站姿评估项目)。选定评估项目后,此运动感测装置便感测此被选定姿态的随时间所发生的变化,譬如,躯干或肢体的偏斜角度、抖动或晃动幅度及其频率等物理量,并估算此等物理量,以量化的方式来评估身体姿态的维持成效是否符合姿态维持参考值,以此客观地决定出符合此姿态维持参考值的维持时间。也就是,本发明将姿态变化量化来评估康复成效,据此以客观的数据来决定姿态的变化是否符合门坎值。借助上述方法,本发明可应用于“中风病患姿势控制评估量表”中维持时间的判断,使中风病患的康复成效评估更客观与精确。
[0051]
图1为本发明的姿态控制评量装置1的示意图,如图所示,本发明的姿态控制评量装置1包括感测单元10、数据库20、处理器30、显示器40及输入设备50。感测单元10包含多个运动传感器,这些运动传感器对应地配置在受试者的多个身体部位上(如躯干、上臂、手腕、大腿及小腿),以产生多个感测数据。数据库20用于储存多个参考身体姿态下各身体部位的姿态维持参考值,例如在坐姿下的各身体部位的参考维持时间、参考偏斜角度、参考抖动时间、参考抖动振幅及参考抖动频率、或者在站姿下的各身体部位的参考维持时间、参考偏斜角度、参考抖动时间、参考抖动振幅及参考抖动频率。处理器30接收来自感测单元10的多个感测数据以及来自数据库20的姿态维持参考值。
[0052]
处理器30中包括姿态确定运算单元301及姿态控制能力评估运算单元302。当受试者处于静止状态时,感测单元10的运动传感器测量各身体部位相对于参考方向的角度或方位角,作为静态感测数据。姿态确定运算单元301根据各身体部位的静态感测数据确定受试者处于站姿、坐姿、蹲姿、卧姿或躺姿(下文称为特定静态身体姿态)。当受试者的特定静态身体姿态持续时,各身体部位可能发生如抖动、晃动或倾斜等运动,感测单元10的运动传感器测量该运动的加速度、角加速度、位移及频率等动态感测数据。姿态控制能力评估运算单元302处理各身体部位的动态感测数据,以获得各身体部位的维持时间、偏斜角度、抖动时间、抖动振幅及抖动频率等姿态维持参数,并将各姿态维持参数与已确定的特定静态身体姿态下对应的各身体部位的姿态维持参考值进行比较,以产生姿态控制能力评估结果。
[0053]
显示器40与处理器30耦接,用于显示姿态控制能力评估结果。输入设备50可以是计算机、手机、平板等具有输入接口的装置,其有线地或无线地与处理器30连接,用于接收操作者(例如医事人员或病患的协助者)的输入,并借助输入接口控制处理器30。操作者可借助手机或平板中的应用程序(app)或者计算机中的软件程序启动处理器30的感测程序及运算程序。处理器30产生的姿态控制能力评估结果可传送至数据库20,也可以传送到云端数据库60。云端数据库60也可以用于储存感测单元10的感测数据,再将感测数据提供至处理器30。
[0054]
以下将进一步说明本发明的姿态控制评量装置1中运动传感器的配置方式及姿态感测方法。请参阅图2a及图2b,其分别为坐立及站立姿态的运动传感器配置。在图2a及图2b中,分别以j-tr、j-sh、j-el、j-kn及j-an表示上半身腰部、肩部上臂、手肘、膝盖及脚踝关节,以s-ua(r)、s-tr、s-ws(r)、s-th(r)及s-cr(r)表示配置于右上臂、躯干上半身、右手腕、右大腿及右小腿的运动传感器。虽然图2a及图2b中仅显示右侧的运动传感器,本发明的运动传感器亦可对称地配置于左上臂、左手腕、左大腿及左小腿。根据本发明的一个实施例,姿态控制评量装置1可具有9个运动传感器(躯干上半身、右侧4个及左侧4个),然而,亦可视评估需要而增加或减少运动传感器的数量。例如,为了评估中风患者的患侧的姿势控制,可仅将运动传感器配置于中风患者的躯干上半身及患侧。可选地,姿态控制评量装置1还包括配置在中风病患肢体上的扶持传感器,例如接触传感器,当中风病患需要扶持时,此接触传感器可感测扶持者的碰触或接触,使接触传感器发出信号。
[0055]
另一方面,本发明提供了一种用于评估受试者的姿态控制能力的方法。图3是本发明姿态控制评量方法100的流程图。如前文所述,当操作者启动如图1中的姿态控制评量装置1的处理器30,即进入姿态感测程序s110。
[0056]
在s110中,借助如图2a及图2b所示的配置在躯干及各个肢体的运动传感器,可获得躯干及各个肢体的静态感测数据,即,躯干及各个肢体相对于参考方向的角度或是方位角。在本发明中,参考方向可为水平方向或重力方向。在本发明的姿态确定程序s120中,利用如图1中的姿态确定运算单元301将躯干及各个肢体的静态感测数据形成多个向量,并以下列数学矩阵或向量模型来呈现身体姿态组态函数,以表示身体姿态组态:
[0057]“上半身-躯干(tr);右上臂(upar);右前臂-手腕(lra-wsr);右大腿(thighr);右小腿(crusr);左上臂(upal);左前臂-手腕(lra-wsl);左大腿(thighl);左小腿(crusl)”。
[0058]
图4a至图10b为各种身体姿态组态的定义,如图所示,每种身体姿态组态是将静止状态下身体各部位的角度以x,y及z方向的向量所对应表示的各种身体姿态组态函数,且每种身体姿态组态即其相对应的身体姿态组态函数各具有其特征值。以下为图4a至图10b中每种身体姿态组态的特征值:
[0059]
坐立姿态组态的特征值为:“tr:0,0,-1g;upar:0,0,-1g;lra-wsr:-gx,0,-gz;thighr:0,-1g,0;crusr:0,gy,-gz;upal:0,0,-1g;lra-wsl:-gx,0,-gz;thighl:0,1g,0;crusl:0,-gy,-gz”;
[0060]
扶持站立姿态组态的特征值为:“tr:0,0,-1g;upar:-gx,-gy,-gz;lra-wsr:-0,-gy,-gz;thighr:0,0,-1g;crusr:0,0,-1g;upal:-gx,gy,-gz;lra-wsl:0,gy,-gz;thighl:0,0,-1g;crusl:0,0,-1g”;
[0061]
站立姿态组态的特征值为:“tr:0,0,-1g;upar:0,0,-1g;lra-wsr:0,0,-1g;
thighr:0,0,-1g;crusr:0,0,-1g;upal:0,0,-1g;lra-wsl:0,0,-1g;thighl:0,0,-1g;crusl:0,0,-1g”;
[0062]
左脚单脚站立姿态组态的特征值为:“tr:0,0,-1g;upar:0,0,-1g;lra-wsr:0,-gy,-gz(或gx,gy,gz);thighr:0,-gy,-gz;crusr:0,0,-1g;upal:0,0,-1g;lra-wsl:0,0,-1g(或gx,gy,gz);thighl:0,0,-1g;crusl:0,0,-1g”;
[0063]
右脚单脚站立姿态组态的特征值为:“tr:0,0,-1g;upar:0,0,-1g;lra-wsr:0,0,-1g(或gx,gy,gz);thighr:0,0,-1g;crusr:0,0,-1g;upal:0,0,-1g;lra-wsl:0,gy,-gz(或gx,gy,gz);thighl:0,gy,-gz;crusl:0,0,-1g”;
[0064]
平躺姿态组态的特征值为:“tr:-1g,0,0;upar:0,-1g,0;lra-wsr:0,-1g,0;thighr:0,-1g,0;crusr:0,-1g,0;upal:0,1g,0;lra-wsl:0,1g,0;thighl:0,1g,0;crusl:0,1g,0”;
[0065]
左侧躺姿态组态的特征值为:“tr:0,1g,0;upar:-gx,gy,-gz;lra-wsr:-gx,-gy,-gz;thighr:-gx,gy,-gz;crusr:gx,gy~1g,-gz~-0;upal:gx,gy,-gz;lra-wsl:gx,gy~1g,gz~0;thighl:gx,-gy,-gz;crusl:gx,-gy,-gz~-0”;
[0066]
右侧躺姿态组态的特征值为:“tr:0,-1g,0;upar:gx,gy,-gz;lra-wsr:-gx,gy,-gz;thighr:gx~0,gy~1g,-gz~-0;crusr:-gx~-0,-gy~-1g,gz~0;upal:-gx,-gy,-gz;lra-wsl:gx,gy,-gz;thighl:-gx,-gy-gz;crusl:-gx~-0,-gy~-1g,-gz~-0”。
[0067]
继续参阅图3,在本发明的姿态确定程序s120中,姿态确定运算单元301进一步将所得到的身体姿态组态与图4a至图10b所示的各种身体姿态组态及其特征值对应,来确定受试者处于何种特定静态身体姿态。此流程相当于利用表一“中风病患姿势控制评估量表”进行评估时,确定中风病患处于1~12项中何种评估项目。
[0068]
在感测程序s110中,运动传感器亦可获得躯干及各个肢体的动态感测数据。当受试者的特定静态身体姿态持续时,理想状态为维持此特定静态身体姿态,然而受试者亦可能在此特定静态身体姿态下发生抖动、晃动或倾斜等运动,而转变为一种动态身体姿态。此时,感测单元10的运动传感器测量各身体部位发生运动的加速度、角加速度、位移及频率等动态感测数据。较佳地,动态感测数据包括加速度、角加速度、位移及频率等参数中的至少两个、至少三个、或全部参数。相关参数说明如下:
[0069]
δa
ua
tr:坐立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)上臂发生的抖动、晃动或倾斜等运动;
[0070]
δa
tr
tr:坐立姿态持续时,以加速度或是相对于重力方向的角度变化表示躯干-上半身发生的抖动、晃动或倾斜等运动;
[0071]
δa
ws
tr:坐立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)手腕发生的抖动、晃动或倾斜等运动;
[0072]
δa
th
tr:坐立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)大腿发生的抖动、晃动或倾斜等运动;
[0073]
δa
cr
tr:坐立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)小腿或脚发生的抖动、晃动或倾斜等运动;
[0074]
δa
ua
dr:站立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)上臂发生的抖动、晃动或倾斜等运动;
[0075]
δa
tr
dr:站立姿态持续时,以加速度或是相对于重力方向的角度变化表示躯干-上半身发生的抖动、晃动或倾斜等运动;
[0076]
δa
ws
dr:站立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)手腕发生的抖动、晃动或倾斜等运动;
[0077]
δa
th
dr:站立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)大腿发生的抖动、晃动或倾斜等运动;
[0078]
δa
cr
dr:站立姿态持续时,以加速度或是相对于重力方向的角度变化表示(右)小腿或脚发生的抖动、晃动或倾斜等运动。
[0079]
在姿态确定程序s120确定受试者的特定静态身体姿态之后,进入姿态控制能力评估程序s130。在姿态控制能力评估程序s130中,利用如图1中的姿态控制能力评估运算单元302处理所测量的动态感测数据,获得各身体部位的姿态维持参数,包含躯干及各个肢体的偏斜角度、抖动幅度大小、抖动频率及抖动时间,并将其对应到相同身体姿势下相同身体部位的标准数据,即,将偏斜角度、抖动幅度、抖动频率以及抖动时间对比于身体姿态维持的整个时间,以判定姿态维持状况是否满足特定评估项目下的评估条件。此流程相当于利用表一“中风病患姿势控制评估量表”进行评估时,根据0~3分的评估条件判断中风病患在其中一项评估项目的维持能力或所需协助程度。
[0080]
在姿态控制能力评估程序s130中,可选择发生抖动、晃动或倾斜等运动较明显的身体部位(例如上半身、手腕、大腿及小腿)来计算姿态维持参数,示例表达式如下,其中f
bd_rhp
代表各身体部位的康复成效函数,th代表标准数据,thxx,thyy及thzz则分别代表在参考坐标的x,y及z轴方向的标准数据,bd代表躯干上半身、手腕、大腿及小腿等身体部位。
[0081][0082]
继续将等式(1)的结果代入等式(2),以获得康复成效评估结果,并于s140输出评估结果。
[0083]
af
bd_rhp
=det(f
bd_rhp
)
ꢀꢀ
等式(2)
[0084]
至于用于上述表达式中的标准数据,则可以参考图11a中的坐立姿态康复成效进展评价及图11b中的站立姿态康复成效进展评价。以图11a为例说明,此图是关于某非特定中风病患或其他病患,或非特定操作者于坐立姿态康复过程中,对坐立姿态时的躯干上半身、右手臂的前臂手腕、右大腿及右小腿的康复成效进行5次评价,分别为sit-1、sit-2、sit-3、sit-4及sit-5,由此5次评价可以看见康复成效指标(四个部位的几何平均值)由sit-1的0.29(上半身:0.47、右小臂:0.43、右大腿:0.48、右小腿:0.07)进步到sit-2的0.69(上半身:0.77、右小臂:0.58、右大腿:0.67、右小腿:0.75)、sit-3的0.8(上半身:0.79、右小臂:0.8、右大腿:0.95、右小腿:0.92)、sit-4的0.87(上半身:0.83、右小臂:0.78、右大腿:0.94、右小腿:0.78)以及sit-5的0.95(上半身:0.97、右小臂:0.85、右大腿:0.98、右小腿:0.98)。由此姿态康复成效进展可以看出中风病患在坐立姿态的维持能力渐渐回复到康复
成效指标1的完全复原状态。于此复原状态下,躯干及各肢体的颤动、抖动、晃动或偏斜皆恢复成正常健康的状态。
[0085]
类似地,图11b则是关于某非特定中风病患或其他病患,或非特定操作者于无扶持站立姿态康复过程中,对站立姿态时的躯干上半身、右手臂的前臂手腕、右大腿及右小腿康复成效进行5次评价,分别为stand-1,stand-2,stand-3,stand-4及stand-5,由此5次评价可以看见康复成效指标由stand-1的0(上半身:0.28、右小臂:0.41、右大腿:0、右小腿:0)进步到stand-2的0.53(上半身:0.62、右小臂:0.54、右大腿:0.55、右小腿:0.42)、stand-3的0.71(上半身:0.71、右小臂:0.62、右大腿:0.76、右小腿:0.78)、stand-4的0.82(上半身:0.76、右小臂:0.87、右大腿:0.85、右小腿:0.82)以及stand-5的0.95(上半身:0.95、右小臂:0.90、右大腿:0.96、右小腿:0.95)。由此姿态康复成效进展可以看出中风病患在站立姿态的维持能力,从康复成效指标0,即抖动、晃动或偏斜幅度超过预定值或无能力站立时,渐渐回复到康复成效指标1的完全复原状态。于此复原状态下,躯干及各肢体的颤动、抖动、晃动或偏斜皆恢复成正常健康的状态。
[0086]
康复过程中,由于身体姿态维持能力还在恢复中,所以可以采用图11a的sit-4或是图11b的stand-4的客观的康复成效指标当作姿态维持参考值,即其所对应的颤动、抖动、晃动或是偏斜值当作表一a-1维持姿势项目下的2.“没有扶持下可以坐立超过10秒钟”的评估条件,用来比对于康复成效评估中所量测到的颤动、抖动、晃动、或偏斜等参考数据,或说姿态维持参数;或是采用图11a的sit-5或是图11b的stand-5康复成效指标当作姿态维持参考值,即其所对应的颤动、抖动、晃动或是偏斜值当作表一a-1维持姿势项目下的3.“没有扶持下可以坐立超过5分钟”的评估条件,用来比对于康复成效评估中所量测到的颤动、抖动、晃动、或偏斜等参考数据,或说姿态维持参数。当然也可以将图11a的sit-5或是图11b的stand-5康复成效指标所对应的颤动、抖动、晃动或是偏斜值当作表一a-1维持姿势项目下的2.“没有扶持下可以坐立超过10秒钟”的评估条件的颤动、抖动、晃动、或偏斜比对参考数据。
[0087]
继续参阅图3,本发明的姿态控制评量方法100在输出评估结果之后,可再进行到具有更高评估条件的又一评估s150,并在s160中选择另一评估姿态或另一评估条件,进一步确定受试者的姿态控制能力。此步骤可借助例如图1中的处理器30及数据库20而实现。例如,当受试者通过表一评估项目a3的评估条件1.“没有扶持下无法站立,没有扶持下可站立超过10秒钟或是身体明显的偏向一侧”之后,本案的姿态控制评量装置1可以提示受试者或是操作者,是否要再继续进行a3的评估条件2.“没有扶持下可站立超过1分钟或是身体些微不对称”的评估。或者,数据库20可以用于储存包含多个评估项目及多个评估条件的评估内容,处理器30根据数据库20中储存的评估项目及评估条件,自动地进行a3的评估条件2的评估。在另一实施例中,本发明的姿态控制评量装置1可以提示受试者或操作者,是否要变换姿势,进行另一个评估项目b11的评估条件1.“需要很多协助”的评估。
[0088]
若受试者选择进行又一评估,本发明的姿态控制评量方法100重新进行s110~s140的程序,以获得又一评估的评估结果。或者,在不改变评估条件的情况下,本发明的姿态控制评量方法100也可以重新进行s110~s140的程序,以验证前一次的评估结果。
[0089]
根据本发明的另一实施例,本发明的姿态控制评量方法100可在指定特定静态身体姿态的情况下,直接执行姿态控制能力评估程序s130,并在s140输出评估结果。在此范例
中,可省略s120,在s110中利用运动传感器感测各身体部位的动态感测数据,依据前文所述的姿态控制能力评估程序进行s130及s140。
[0090]
本发明的姿态控制评量装置1及姿态控制评量方法100除了产生姿态控制能力评估结果之外,也能根据评估结果提供受试者合适的行动练习规划。例如,依据评估结果,从数据库20储存的评估条件选出行动练习内容以及与行动练习内容对应的时间配置。行动练习规划的一个实施例可包括:从表一评估项目a3“无扶持下站立”进阶至评估项目a4“健侧脚站立”、再进阶至评估项目a5“患侧脚站立”。行动练习规划的另一个实施例可包括:从表一评估项目b12“站立时,捡起地上的铅笔”变换至评估项目b11“由站到坐”、再变换至评估项目b10“由坐到站”。
[0091]
以下将借助具体实施例说明本发明姿态控制评量方法100的姿态确定程序及姿态控制能力评估程序。
[0092]
实施例1.无扶持下坐立姿态
[0093]
若运动传感器感测到无扶持下坐立姿态组态特征值,如图4a及图4b所示,则姿态确定运算单元便会选定表一评估项目a1“无扶持下坐立”姿态、或评估项目b9“从坐到平躺”姿态、或评估项目b10“由坐到站”姿态,以进行后续的姿态控制能力评估,包括评估条件如下:
[0094]
a1.无法坐立、需些微扶持下始能坐立、没有扶持下可以坐立超过10秒钟、或没有扶持下可以坐立超过5分钟;
[0095]
b9.无法从事、很多协助、一点协助、或不需协助;
[0096]
b10.无法从事、很多协助、一点协助、或不需协助。
[0097]
实施例2.扶持下站立姿态
[0098]
若运动传感器感测到扶持下站立姿态组态特征值,如图5a及图5b所示,则姿态确定运算单元便会选定表一评估项目a2“扶持下站立”姿态、或评估项目b11“由站到坐”姿态、或评估项目b12“站立时,捡起地上的铅笔”,以进行后续的姿态控制能力评估,包括评估条件如下:
[0099]
a2.扶持下仍无法站立、两人用力扶持下可站立、一人中度扶持下可站立、或单手扶持下可站立;
[0100]
b11.无法从事、很多协助、一点协助、或不需协助;
[0101]
b12.无法从事、很多协助、一点协助、或不需协助。
[0102]
实施例3.无扶持下站立姿态
[0103]
若运动传感器感测到无扶持下站立姿态组态特征值,如图6a及图6b所示,则姿态确定运算单元便会选定表一评估项目a3“无扶持下站立”姿态,以进行后续的姿态控制能力评估,包括评估条件如下:
[0104]
a3.没有扶持下无法站立、没有扶持下可站立超过10秒钟或是身体明显的偏向一侧、没有扶持下可站立超过1分钟或是身体些微不对称、或没有扶持下可站立超过1分钟同时手臂可以在超过肩膀的高度活动。
[0105]
进行a3评估时,运动传感器将会量测躯干及各肢体的倾斜、抖动及摆动等动态感测数据,藉此分析受试者在此站立姿态下的姿态控制能力。若量测到的动态感测数据无法与所定义的站立姿态组态特征值对应,则可客观的反映受试者在无扶持下无法站立的事
实。
[0106]
实施例4.健侧脚(或左脚)站立姿态
[0107]
若运动传感器感测到健侧脚站立(或左脚)姿态组态特征值,如图7a或图7b所示,则姿态确定运算单元便会选定表一评估项目a4“健侧脚站立(或左脚)”姿态,以进行后续的姿态控制能力评估,包括评估条件如下:
[0108]
a4.无法站立、站立数秒钟、站立超过5秒钟、或站立超过10秒钟。
[0109]
进行a4评估时,运动传感器将会量测躯干及各肢体的倾斜、抖动及摆动等动态感测数据,藉此分析受试者在此身体姿态下,即健侧脚站立(或左脚)姿态下的姿态控制能力。若量测到的动态感测数据无法与所定义的身体姿态组态特征值对应,则可客观的反映受试者无法达成或维持健侧脚(或左脚)站立姿态的事实。
[0110]
实施例5.患侧脚(或右脚)站立姿态
[0111]
若运动传感器感测到患侧脚(或右脚)站立姿态组态特征值,如图8a或图8b所示,则姿态确定运算单元便会选定表一评估项目a5“患侧脚站立(或右脚)”姿态,以进行后续的姿态控制能力评估,包括评估条件如下:
[0112]
a5.无法站立、站立数秒钟、站立超过5秒钟、或站立超过10秒钟。
[0113]
进行a5评估时,运动传感器将会量测躯干及各肢体的倾斜、抖动及摆动等动态感测数据,借此分析受试者在此身体姿态下,即患侧脚(或右脚)站立姿态下的姿态控制能力。若量测到的动态感测数据无法与所定义的身体姿态组态特征值对应,则可客观的反映受试者无法达成或维持患侧脚(或右脚)站立姿态的事实。
[0114]
实施例6.平躺姿态
[0115]
若运动传感器感测到平躺姿态组态特征值,如图9a及图9b所示,则姿态确定运算单元便会选定表一评估项目b6“从平躺翻身到患侧(或左侧)”姿态、或评估项目b7“从平躺翻身到健侧(或右侧)”姿态、或评估项目b8“从平躺到坐”姿态,以进行后续的姿态控制能力评估,包括评估条件如下:
[0116]
b6.无法从事、很多协助、一点协助、或不需协助;
[0117]
b7.无法从事、很多协助、一点协助、或不需协助;
[0118]
b8.无法从事、很多协助、一点协助、或不需协助。
[0119]
本公开的运动传感器可以感测受试者初始的身体姿态(即平躺姿态)以及最后的身体姿态(即左侧躺、右侧躺或坐立姿态)的躯干及各肢体的运动感测数据,藉此与定义的平躺姿态组态特征值以及最后的身体姿态组态特征值对应,以获得此等身体姿态变换的姿态控制能力。
[0120]
虽然本发明已以较佳实施例公开如上,然其并非用以限定本发明,任何本领域技术人员,在不脱离本发明的精神和范围内,当可作些许的更动与润饰,因此本发明的保护范围当视后附的权利要求书所界定者为准。另外,本发明的任一实施例或权利要求书不须达成本发明所公开的全部目的或优点或特点。此外,摘要部分和标题仅是用来辅助专利文件搜索之用,并非用来限制本发明的权利范围。
[0121]
【符号说明】
[0122]
1:姿态控制评量装置
[0123]
10:感测单元
[0124]
20:数据库
[0125]
30:处理器
[0126]
301:姿态确定运算单元
[0127]
302:姿态控制能力评估运算单元
[0128]
40:显示器
[0129]
50:输入设备
[0130]
60:云端数据库
[0131]
100:姿态控制评量方法
[0132]
s110:姿态感测程序
[0133]
s120:姿态确定程序
[0134]
s130:姿态控制能力评估程序
[0135]
s140:输出评估结果
[0136]
s150:又一评估
[0137]
s160:选择另一评估姿态或另一评估条件
[0138]
g:重力加速度方向
[0139]
g:重力加速度(9.81m/s2)
[0140]
gx:重力加速度在参考坐标的x轴方向分量
[0141]
gy:重力加速度在参考坐标的y轴方向分量
[0142]
gz:重力加速度在参考坐标的z轴方向分量
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1