检査设备系统的制作方法
1.本发明涉及一种检査设备系统。
背景技术:
2.例如,日本特开平4-333782号公报公开了一种用于应对医疗设施的紧急的配置以及增设的单元医院。单元医院具备由生物洁净室(bioclean room)可搬运的模块构成的单元。该单元拆装自由地连结到通过其他的可搬模块连结而形成的设施模块。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平4-333782号公报
技术实现要素:
6.本发明所要解决的课题
7.至今,由新型病原体导致的传染病流行屡屡发生。近年来,发生着由sars、mers以及covid-19等新型冠状病毒引起的传染病的流行。在传染病流行的情况下,检査的需求、以及可实施检査的场所的需求增大。例如,在covid-19那样的新型冠状病毒的情况下,有时会使用使病毒的特征部分扩增的pcr(聚合酶连锁反应;polymerase chain reaction)检査。为了执行从pcr检査中的检验体的采集至检査结果的输出的一系列处理,需要各种专用设备。因此,根据需要将各种场所变成可进行pcr检査的一系列处理的环境并不容易。
8.本公开申请提供一种检査设备系统,其在不具备检査设备的场所中简易地构建可进行检査的一系列处理的环境。
9.用于解决课题的方案
10.本公开申请的一方式的检査设备系统为用于进行来自被检者的检验体的采集以及测量的检査设备系统,其具备:第一单元部分,其形成具备用于采集检验体的设备的采集室;第二单元部分,其以与采集室隔离的方式形成具备用于测量检验体的设备的测量室;第三单元部分,其具备对测量的结果进行输出的设备,检査设备系统被配置在输送旅客的移动据点。
11.根据本公开申请的技术,简易地使不具备检査设备的场所成为可进行检査的一系列处理的环境。
附图说明
12.图1为表示第一实施方式的检査设备系统的结构的一例的俯视图。
13.图2为表示第一实施方式的检査设备系统的结构的一例的截面侧视图。
14.图3为表示第一实施方式的检査设备系统的功能性结构的一例的框图。
15.图4为表示第一实施方式的第一机器人的结构的一例的主视图。
16.图5为表示第一实施方式的变形例1的检査设备系统的结构的一例的截面侧视图。
17.图6为表示第一实施方式的变形例2的检査设备系统的结构的一例的截面侧视图。
18.图7为表示第一实施方式的检査设备系统在机场中的配置例的框图。
19.图8为表示第二实施方式的检査系统的整体结构的概要的图。
20.图9为表示第二实施方式的检査系统的整体结构的具体结构的图。
21.图10为表示第二实施方式的检査系统的第一单元的结构的图。
22.图11为表示第二实施方式的检査系统的检验体采集容器的图。
23.图12为表示第二实施方式的检査系统的消毒液槽的图。
24.图13为表示第二实施方式的检査系统的检验体采集容器搬运部的图。
25.图14为表示用于进行第二实施方式的检査系统的第二单元的开箱分装处理以及灭活处理的结构的图。
26.图15为表示用于进行第二实施方式的检査系统的第二单元的核酸提取处理的结构的图。
27.图16为表示进行第二实施方式的检査系统的核酸提取处理的板(plate)的图。
28.图17为表示第二实施方式的检査系统的第二单元的废弃箱的图。
29.图18为表示第二实施方式的检査系统的第三单元的结构的图。
30.图19为表示第二实施方式的检査系统的盖闭合部件的图。
31.图20为表示第三实施方式的检査系统的整体结构的具体结构的图。
32.图21为表示第四实施方式的检査系统的整体结构的概要的图。
33.图22为表示用于进行第四实施方式的检査系统的第二单元的开箱分装处理的结构的立体图。
34.图23为表示用于进行第四实施方式的检査系统的第二单元的开箱分装处理的结构的俯视图。
35.图24为表示第四实施方式的检査系统的第二单元的检验体保管部的移动机器人的手的图。
36.图25为表示第四实施方式的检査系统的第二单元的检验体分装部的开箱机器人的手的图。
37.图26为表示第四实施方式的检査系统的第二单元的检验体分装部的开箱握持部的图。
38.图27为表示第四实施方式的检査系统的第二单元的检验体分装部的分装机器人的手的图。
39.图28为表示第四实施方式的检査系统的第二单元的工件搬运部的搬运机器人的手的图。
40.图29为表示第四实施方式的检査系统的第二单元的试剂分装部的分装机器人的手的图。
41.图30为表示握持第四实施方式的检査系统的第三单元的多支装管的手的立体图。
42.图31为表示握持第四实施方式的检査系统的第三单元的多支装管的手的侧视图。
具体实施方式
43.(第一实施方式)
44.以下,参照附图并对本公开申请的实施方式进行说明。另外,以下进行说明的实施方式均为表示总括性或具体性示例的方式。此外,关于以下实施方式中的结构要素之中、未记载在表示最上位概念的独立权利要求中的结构要素,作为任意的结构要素而说明。此外,附图中的各图为示意图,并不是严格意义上的图示。而且,在各图中,针对实质上相同的结构要素标注同一符号,有时会省略或简略化重复的说明。此外,在本说明书以及请求的范围中,“装置”不仅可指一个装置,还可指由多个装置构成的系统。
45.[检査设备系统的结构]
[0046]
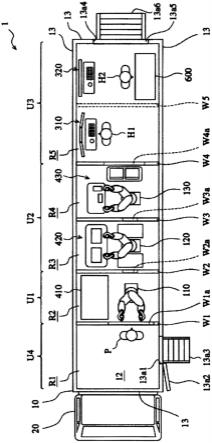
图1为表示第一实施方式所涉及的检査设备系统1的结构的一例的俯视图。图2为表示第一实施方式所涉及的检査设备系统1的结构的一例的截面侧视图。如图1及图2所示,检査设备系统1为用于进行来自被检者p的检验体的采集以及测量的系统。在以下的实施方式中,检査设备系统1作为用于进行pcr检査的检验体的采集以及测量并分析的系统来说明。检査设备系统1具备:容纳用于进行检验体的采集以及测量并分析的设备的箱体10、和装载箱体10的移动体20。
[0047]
箱体10将箱体10的内部空间与外部空间阻断。箱体10可预先形成为箱状,并通过机械而被装载到移动体20上。这样的箱体10例如可以是也可用于货物搬运的集装箱。箱体10可通过叉车以及起重机等装卸机械而装载在移动体20上。箱体10可在移动体20上或移动体20内被组装。另外,在第一实施方式中,箱体10为集装箱。
[0048]
移动体20在装载了箱体10的状态下可移动,其具体结构并未特别地限制。移动体20具备驱动装置等,并且不仅自身可移动,也可通过其他的移动体而牵引或按压来移动。例如,移动体20可以是在地面上可行驶的、卡车等大型汽车或拖车等的被牵引汽车。在地面上使移动体20移动的结构并不局限于车轮,例如,可以是履带牵引装置(crawler)、以及机器人的腿部那样的可步行的腿等。例如,移动体20可以是在轨道上可移动的、铁道列车等的火车或被牵引车。例如,移动体20可以是自身在水面上或水中可航行的船舶、或者、自身在水面上及水中不能航行的浮桥。例如,移动体20可以是飞机等固定翼航空器以及直升机等旋转翼航空器。另外,在第一实施方式中,移动体20为大型汽车。
[0049]
检査设备系统1可通过移动体20向各种场所移动。而且,只要具有供移动体20或箱体10收纳的空间的场所,检査设备系统1可配置在任何的场所。
[0050]
检査设备系统1被配置在输送旅客的移动据点。此外,输送旅客是指,包括通过交通设施为车辆、航空器、铁道、船舶等的移动体来对乘客进行搬运的广义的概念。检査设备系统1例如可移动到跨越地理边界的移动的起点或终点并配置在该地点。检査设备系统1可在将箱体10装载到移动体20的状态下使用,也可在箱体10从移动体20下降到地面等状态下使用。另外,在第一实施方式中,检査设备系统1是在将箱体10装载于移动体20的状态下使用的。地理边界并未特别地限制,可以是边境、都道府县及州等行政区划的边界、自治区划的边界、以及、由岛屿间的海形成的边界等。跨越地理边界的移动的起点以及终点例如可以是机场、海港或河港、铁道的站台、巴士站、汽车专用道路的出入口、以及、边境检查站等。
[0051]
检査设备系统1在箱体10内包括第一单元部分u1~第四单元部分u4。箱体10容纳第一单元部分u1~第四单元部分u4的整体。第一单元部分u1~第四单元部分u4与箱体10一起作为整体而一体化,从而形成一个单元。即,检査设备系统1由一个单元构成。
[0052]
第一单元部分u1为形成具备用于采集来自被检者p的检验体的设备的采集室r2的
部分。
[0053]
第二单元部分u2为以与采集室r2隔离的方式形成具备用于测量并分析检验体的设备的分析室r3及r4的部分。第二单元部分u2抑制以悬浮及飞散等方式存在于空气中的病原体侵入分析室r3及r4。第二单元部分u2包括形成第一分析室r3的第一分析单元部分、和形成第二分析室r4的第二分析单元部分。另外,第一分析室r3为测量室以及第一测量室的一例,第二分析室r4为测量室以及第二测量室的一例。
[0054]
第三单元部分u3为,具备输出分析结果的设备的一例即结果输出装置600的单元部分。并不局限于此,在第一实施方式中,第三单元部分u3以与采集室r2隔离的方式形成容纳医疗从业者h1及h2的容纳室r5,并在容纳室r5内包括结果输出装置600。第三单元部分u3抑制存在于空气中的病原体侵入容纳室r5。并不局限于此,在第一实施方式中,医疗从业者h1为医师,医疗从业者h2为检査技师。在下文中,有时将“医疗从业者h1”表述为“医师h1”,将“医疗从业者h2”表述为“检査技师h2”。
[0055]
第四单元部分u4为,以与分析室r3及r4隔离的方式形成被检者p接受用于采集检验体的诊疗的诊疗室r1的部分。第四单元部分u4抑制存在于空气中的病原体侵入分析室r3及r4。
[0056]
诊疗室r1与采集室r2相邻。诊疗室r1被箱体10的上壁11、底壁12以及邻接的3个侧壁13包围,并通过隔壁w1而与采集室r2隔开。隔壁w1被固定在箱体10上,是不动的。在隔壁w1上形成有开口部,在开口部上嵌入有由玻璃等形成的透明的隔板w1a。在隔板w1a上形成有可进行诊疗室r1与采集室r2之间的通路的开口部,以采集来自被检者p的检验体。
[0057]
在包围诊疗室r1的侧壁13之中的一个且与隔壁w1邻接的侧壁13上,形成有用于被检者p出入诊疗室r1的出入开口13a1,在出入开口13a1配置有对出入开口13a1进行开闭的门13a2。门13a2可通过电等动力而进行开闭动作,也可通过手动而进行开闭动作。门13a2具有遮挡出入开口13a1的能力。用于升降到出入开口13a1的阶梯13a3以收纳及展开自由或拆装自由的方式配置在出入开口13a1。诊疗室r1可与箱体10的外部阻断。
[0058]
采集室r2与诊疗室r1以及第一分析室r3相邻。诊疗室r1以及第一分析室r3以隔着采集室r2的方式互相位于相反侧。采集室r2被箱体10的上壁11、底壁12以及2个对置的侧壁13包围,并通过隔壁w1而与诊疗室r1隔开、且通过隔壁w2而与第一分析室r3隔开。隔壁w2被固定在箱体10上,是不动的。隔壁w2上形成有开口部,并在开口部配置有对开口部进行开闭的卷帘w2a。卷帘w2a为,通过电动马达的驱动来进行滑动移动而对开口部进行开闭的滑动门。卷帘w2a具有遮挡开口部的能力。采集室r2与诊疗室r1连通,而可与第一分析室r3隔离。
[0059]
第一分析室r3与采集室r2以及第二分析室r4相邻。采集室r2以及第二分析室r4以隔着第一分析室r3的方式互相位于相反侧。第一分析室r3被箱体10的上壁11、底壁12以及2个对置的侧壁13包围,并通过隔壁w2与采集室r2隔开、且通过隔壁w3而与第二分析室r4隔开。隔壁w3被固定在箱体10上,是不动的。隔壁w3上形成有开口部,并在开口部配置有对开口部进行开闭的卷帘w3a。卷帘w3a为,通过电动马达的驱动来进行滑动移动而对开口部进行开闭的滑动门。卷帘w3a具有遮挡开口部的能力。第一分析室r3可与采集室r2以及第二分析室r4隔离。
[0060]
第二分析室r4与第一分析室r3以及容纳室r5相邻。第一分析室r3以及容纳室r5以隔着第二分析室r4的方式互相位于相反侧。第二分析室r4被箱体10的上壁11、底壁12以及2
个对置的侧壁13包围,并通过隔壁w3与第一分析室r3隔开、且通过隔壁w4与容纳室r5隔开。隔壁w4被固定在箱体10上,是不动的。隔壁w4上形成有开口部,并在开口部配置有对开口部进行开闭的门w4a。门w4a可通过电等动力而进行开闭动作,也可通过手动而进行开闭动作。门w4a具有遮挡开口部的能力。第二分析室r4可与第一分析室r3以及容纳室r5隔离。
[0061]
容纳室r5与第二分析室r4相邻。容纳室r5被箱体10的上壁11、底壁12以及邻接的3个侧壁13包围,并通过隔壁w4而与第二分析室r4隔开。容纳室r5可与第二分析室r4隔离。容纳室r5可配置有可设置及除去的壁w5。壁w5划分医师h1的办公区域与检査技师h2的区域。
[0062]
在包围容纳室r5的侧壁13之中的一个且与隔壁w4对置的侧壁13上,形成有用于医疗从业者h1及h2出入箱体10内以及器材搬出搬入箱体10内的出入开口13a4,出入开口13a4上配置有对出入开口13a4进行开闭的门13a5。门13a5可通过电等动力而进行开闭动作,也可通过手动而进行开闭动作。门13a5具有遮挡出入开口13a4的能力。用于升降到出入开口13a4的阶梯13a6以收纳及展开自由或拆装自由的方式配置在出入开口13a4。容纳室r5可与箱体10的外部阻断。
[0063]
图3为表示第一实施方式所涉及的检査设备系统1的功能性结构的一例的框图。如图1~图3所示,第四单元部分u4在诊疗室r1内具备第一室内拍摄装置510。第一室内拍摄装置510例如具备可见光照相机等,并对诊疗室r1内进行拍摄。第一室内拍摄装置510将拍摄到的图像的数据发送给容纳室r5中所配置的第一操作输入输出装置310的提示装置313以及第二操作输入输出装置320的提示装置323中的至少一方。
[0064]
第一单元部分u1具备使采集室r2成为负压环境的第一空调系统ac1。第一空调系统ac1使采集室r2和与采集室r2连通的诊疗室r1成为负压环境。由此,采集室r2以及诊疗室r1内的气压低于第一分析室r3内的气压。采集室r2以及诊疗室r1内的气压也可低于外气压。第一空调系统ac1可具备空调机器、空气清净装置、吸气排气装置、导管、过滤器以及防反流挡板等。通过第一空调系统ac1的作用,可抑制存在于空气中的病原体漏向采集室r2以及诊疗室r1的外部。
[0065]
第一单元部分u1在采集室r2内具备:执行采集来自被检者p的检验体的行为的第一机器人110、接纳装置410、第二室内拍摄装置520。第一机器人110通过操作输入输出装置310及320而被操作。为了操作第一操作输入输出装置310的医师h1与被检者p能够进行沟通,第一机器人110具备沟通装置。第二室内拍摄装置520例如具备可视光照相机等,并对采集室r2内进行拍摄。第二室内拍摄装置520将拍摄到的图像的数据发送给第二操作输入输出装置320的提示装置323。
[0066]
第一单元部分u1在采集室r2内还可具备第一机器人110用于进行医疗检査行为的器具、实验装置、以及各种检査试剂等。作为上述器具,例如可列举出自动移液器、用于自动移液器的吸头(tip)、微型管(microtube)、离心管(远心管)、离心沉淀管(离心沉淀管),作为上述实验装置,例如可列举出离心分离机、pcr装置等。
[0067]
接纳装置410可从第一机器人110接受检验体。并不局限于此,在第一实施方式中,接纳装置410具备使检验体灭活的功能。接纳装置410还可具备分装检验体的功能,但第一机器人110也可在接纳装置410中对检验体进行分装。接纳装置410可具备将灭活检验体移送到第一分析室r3的功能,但第一机器人110也可通过卷帘w2a的开口部将灭活检验体移送给第一分析室r3。
[0068]
第一机器人110执行来自被检者p的检验体的采集行为、检验体送入接纳装置410的送入行为、接纳装置410中的检验体的分装行为、灭活检验体从接纳装置410的取出行为、以及、灭活检验体移送第一分析室r3的移送行为之中的至少一个。
[0069]
例如,第一机器人110按照使用了第一操作输入输出装置310的医师h1的操作来进行来自被检者p的检验体的采集行为。第一机器人110在医师h1的手动操纵下进行检验体的采集行为,但也可以搭载ai(人工智能;artificial intelligence)在自动操纵下进行。第一机器人110按照从第二操作输入输出装置320接收的指令来进行检验体的采集行为以外的行为,但也可以按照从第一操作输入输出装置310接收的指令来进行。第一机器人110在按照自动化程序的自动操纵下进行检验体的采集行为以外的行为,但也可以在使用了操作输入输出装置320或310的手动操纵下执行。
[0070]
隔壁w2的卷帘w2a可通过操作输入输出装置310及320之一而被操作,也可通过第一控制装置210或综合控制装置240而被自动控制。
[0071]
在此,对第一机器人110的结构进行说明。图4为表示第一实施方式所涉及的第一机器人110的结构的一例的主视图。如图4所示,第一机器人110具备机器人臂即臂111及112、和安装在臂111及112各自的前端的机器人手即手113及114。手113及114作用于对象物上,也被称作末端执行器。臂111及112分别由水平多关节型的机器人臂构成,臂111及112的基部被配置在同轴上。第一机器人110为同轴双腕机器人。后述的第二机器人120以及第三机器人130也是同轴双腕机器人。
[0072]
另外,机器人110~130的结构并不局限于具备水平多关节型的机器人臂的同轴双腕机器人,可以是任何机器人。例如,机器人110~130可具备垂直多关节型、极座标型、圆筒座标型、直角座标型以及其他的形式的任何机器人臂。机器人110~130所具备的臂的数量可以是1个及3个以上的任何数量。此外,机器人110~130具有与产业用机器人同样的结构,但也可具有服务机器人以及人形机(humanoid)等结构。服务机器人为,看护、医疗、清扫、警备、向导、救助、烹饪、商品提供等各种服务业中所使用的机器人。
[0073]
第一机器人110还具备提示装置115(参照图3)、拍摄装置116、集音装置117。提示装置115、拍摄装置116以及集音装置117是用于被检者p与医师h1进行沟通的装置。
[0074]
拍摄装置116例如具备可见光照相机等,并且隔着隔板w1a来对诊疗室r1的被检者p进行拍摄,且至少将拍摄到的图像的数据发送给第一操作输入输出装置310以及第二操作输入输出装置320之中的第一操作输入输出装置310。集音装置117例如具备麦克风等,并且隔着隔板w1a来收集诊疗室r1的被检者p的声音等,且至少将收集到的声音信号发送给第一操作输入输出装置310以及第二操作输入输出装置320之中的第一操作输入输出装置310。
[0075]
提示装置115具备显示器115a以及声音输出装置115b。显示器115a可以是液晶显示器(liquid crystal display)以及有机或无机el显示器(electro―luminescence display)等显示器。声音输出装置115b可以是扬声器、耳塞式耳机(earphone)以及头戴式耳机(headphone)等。显示器115a以及声音输出装置115b隔着隔板w1a向诊疗室r1的被检者p提示由第一操作输入输出装置310的拍摄装置314以及集音装置315(参照图3)取得的与图像数据以及与声音信号对应的图像以及声音。显示器115a以及声音输出装置115b可向被检者p提示由第二操作输入输出装置320的拍摄装置324以及集音装置325(参照图3)取得的与图像数据以及与声音信号对应的图像以及声音。
[0076]
第一实施方式中,拍摄装置116以及集音装置117被固定并配置在显示器115a上,但并不局限于此,只要能够取得被检者p的图像以及声音即可。例如,拍摄装置116以及集音装置117也可以配置在臂111以及112、隔板w1a、被检者p、以及诊疗室r1等。显示器115a被固定并配置在第一机器人110的臂111以及112的基部附近,但并不局限于此,只要能向被检者p提示图像即可。声音输出装置115b被固定并配置在显示器115a上,但并不局限于此,只要能够向被检者p提示声音即可。例如,显示器115a以及声音输出装置115b可配置在臂111及112、隔板w1a、被检者p、以及诊疗室r1等。
[0077]
如图1~图3所示,第二单元部分u2具备第二空调系统ac2a以及ac2b。第二空调系统ac2a使第一分析室r3成为正压环境,并使第一分析室r3内的气压成为高于采集室r2内的气压。由此,从采集室r2以及第二分析室r4向第一分析室r3的空气的流入受到抑制。第一分析室r3内的气压也可高于外气压。第二空调系统ac2b使第二分析室r4成为负压环境,并使第二分析室r4内的气压低于第一分析室r3内的气压。第二空调系统ac2a及ac2b可具备空调机器、空气清净装置、吸气排气装置、导管、过滤器以及防反流挡板等。
[0078]
第二单元部分u2在第一分析室r3内具备对从采集室r2送来的检验体执行第一分析行为的第二机器人120、第一分析装置420、和第三室内拍摄装置530。第二机器人120与第一机器人110同样地,具备臂121及122、和臂121及122各自的前端的手123及124。另外,由于第二机器人120不与被检者p进行沟通,因此不具备提示装置、拍摄装置以及集音装置,但可具备拍摄装置来作为第二机器人120的眼睛。第二机器人120通过第二操作输入输出装置320而被操作。第三室内拍摄装置530具备可见光照相机等,并对第一分析室r3内进行拍摄。第三室内拍摄装置530将拍摄到的图像的数据发送给第二操作输入输出装置320的提示装置323。
[0079]
第一分析装置420包括为了针对灭活了的检验体进行的第一分析所需的各种装置以及器具。第一分析是在正压环境下而进行的分析。例如,在pcr检査的情况下,第一分析包括来自检验体的核酸的提取、pcr反应液的生成以及调节、对照品的添加、以及密封等工序。第一分析装置420包括各工序所需的装置以及器具。
[0080]
第二机器人120使用第一分析装置420中所含有的装置以及器具来执行第一分析的各工序中的至少一个。第二机器人120通过隔壁w3的卷帘w3a的开口部,来进行向第二分析室r4移送第一分析后的检验体的行为。另外,第一分析装置420也可进行第一分析后的检验体的移送。第二机器人120按照从第二操作输入输出装置320接收的指令来进行各行为,但也可以按照从第一操作输入输出装置310接收的指令来进行。第二机器人120在按照自动化程序的自动操纵下进行各行为,但也可以在使用了操作输入输出装置320或310的手动操纵下执行。
[0081]
第二单元部分u2在第二分析室r4内具备对从第一分析室r3送来的检验体执行第二分析行为的第三机器人130、第二分析装置430、和第四室内拍摄装置540。第三机器人130具有与第二机器人120同样的结构,具备臂131及132、和臂131以及132各自的前端的手133及134。另外,第三机器人130可具备拍摄装置来作为第三机器人130的眼睛。第三机器人130通过第二操作输入输出装置320而被操作。第四室内拍摄装置540具备可见光照相机等,并对第二分析室r4内进行拍摄。第四室内拍摄装置540将拍摄到的图像的数据发送给第二操作输入输出装置320的提示装置323。
[0082]
第二分析装置430包括为了针对第一分析后的检验体进行的第二分析所需的各种装置以及器具。第二分析是在负压环境下而进行的分析。例如,在pcr检査的情况下,第二分析包括pcr扩增、检出以及检出结果数据的输出等工序。第二分析装置430包括各工序所需的装置以及器具。
[0083]
第三机器人130使用第二分析装置430中所含有的装置以及器具来执行第二分析的各工序的至少一个。第三机器人130可通过隔壁w4的门w4a的开口部,来进行向容纳室r5移送第二分析后的检验体的行为。第三机器人130按照从第二操作输入输出装置320接收的指令来进行各行为,但也可按照从第一操作输入输出装置310接收的指令来进行。第三机器人130在按照自动化程序的自动操纵下进行各行为,但也可以在使用了操作输入输出装置320或310的手动操纵下执行。
[0084]
第三单元部分u3具备第三空调系统ac3。第三空调系统ac3对容纳室r5内进行空气调节。例如,第三空调系统ac3可使容纳室r5内的气压高于第二分析室r4内的气压,例如可设为与外气压同等的气压。第三空调系统ac3可具备空调机器、空气清净装置、吸气排气装置、导管、过滤器以及防反流挡板等。
[0085]
第三单元部分u3在容纳室r5内具备第一操作输入输出装置310、第二操作输入输出装置320、结果输出装置600。操作输入输出装置310及320分别具备输入装置311及321、操作装置312及322、提示装置313及323、拍摄装置314及323、集音装置315及325。
[0086]
输入装置311及321受理医疗从业者h1及h2的指令、信息以及数据等的输入。例如,输入装置311及321可受理在机器人110~130所要执行的自动操纵下的自动动作的指令,并将该指令输出至综合控制装置240。输入装置311及321可具备控制杆、按钮、触摸面板、操纵杆、动作捕捉、照相机以及麦克风等公知的输入手段。例如,输入装置311及321可具备教具之一即示教器(teaching pendants)、智能手机以及平板电脑等智能设备、个人计算机、以及专用终端装置等终端装置。
[0087]
操作装置312及322受理有关于用于手动操纵机器人110~130的操作的、医疗从业者h1及h2的输入。操作装置312及322可将与该操作对应的指令输出至综合控制装置240。操作装置312及322可具备控制杆、按钮、触摸面板、操纵杆、动作捕捉、照相机以及麦克风等公知的输入手段。在第一实施方式中,机器人110~130在手动操纵下以主从方式被控制,并且操作装置312及322具备主机。操作装置312及322不仅输出使机器人110~130执行按照所输入的操作的动作的指令,而且还将作用于机器人110~130的手的力的反馈,给予到对操作装置312及322进行操作的医疗从业者h1及h2。
[0088]
此外,操作装置312及322可具备在紧急时(例如机器人110~130进行异常动作的情况等)由医疗从业者h1及h2按下的解除按钮(图示略)。表示按压解除按钮的指令可与以下指令等相关联,即,用于释放保持于手上的医疗检査器具或医疗诊疗器具的指令、和/或、用于将手从被检者p处移开的指令等。
[0089]
提示装置313具备关于第一机器人110的提示装置115而例示那样的显示器以及声音输出装置。提示装置313向医师h1等提示由第一机器人110的拍摄装置116以及集音装置117取得的与图像数据以及与声音信号对应的图像以及声音。提示装置313可提示被检者p的图像以及声音。提示装置313可提示由室内拍摄装置510~540取得的与图像数据对应的图像。
[0090]
提示装置323至少具备关于第一机器人110的提示装置115而所例示那样的显示器以及声音输出装置之中的显示器。提示装置323向检査技师h2等提示由室内拍摄装置510~540取得的图像数据所对应的图像。提示装置323可提示各室内的图像。提示装置323也可提示由第一机器人110的拍摄装置116以及集音装置117、以及机器人120、130的拍摄装置(图示略)取得的与图像数据以及声音信号所对应的图像以及声音。
[0091]
拍摄装置314及324具备可见光照相机等。集音装置315及325具备麦克风等。拍摄装置314以及集音装置315取得第一操作输入输出装置310的操作者即医师h1等的图像数据以及声音信号并输出给第一机器人110的提示装置115。拍摄装置314以及集音装置315可向被检者p提示医师h1的图像以及声音。拍摄装置324以及集音装置325取得第二操作输入输出装置320的操作者即检査技师h2等的图像数据以及声音信号并输出给第一机器人110的提示装置115。拍摄装置324以及集音装置325可向被检者p提示检査技师h2的图像以及声音。
[0092]
结果输出装置600为输出分析结果的设备的一例。结果输出装置600从第二分析装置430接收检出结果的数据。结果输出装置600可将对检出结果的数据的判定、意见以及证明等的附加数据附加到该数据中。结果输出装置600可按照程序生成附加数据,也可按照由医师h1以及检査技师h2等所输入的信息来生成附加数据。结果输出装置600输出包括附加数据的检出结果的数据以作为被检者p可目视确认的数据或纸张。例如,结果输出装置600可对pcr检査的阴性的凭证进行数据输出或纸质输出。
[0093]
如图3所示,检査设备系统1具备第一控制装置210、第二控制装置220、第三控制装置230以及综合控制装置240,以作为用于控制各装置的动作的控制装置。
[0094]
第一控制装置210对第一机器人110的各结构要素的动作进行控制。第二控制装置220对第二机器人120的各结构要素的动作进行控制。第三控制装置230对第三机器人130的各结构要素的动作进行控制。
[0095]
综合控制装置240对检査设备系统1的整体进行控制。例如,综合控制装置240从操作输入输出装置310及320接收指令,并将该指令输出至该指令的对象的装置、或者、按照该指令来对该指令的对象的装置的动作进行控制。例如,综合控制装置240在操作输入输出装置310及320的指令的对象是机器人110~130之中的任意机器人的情况下,将该指令输出至对控制装置210~230之中的该机器人进行控制的控制装置。综合控制装置240可通过一个第一操作输入输出装置310对机器人110~130之中的某个机器人进行操作,并且可通过一个第二操作输入输出装置320来对机器人110~130之中的任意机器人进行操作。
[0096]
例如,综合控制装置240可在操作输入输出装置310及320的指令的对象为室内拍摄装置510~540、接纳装置410以及分析装置420~430之中的任意装置的情况下,将该指令输出至该装置、或者、按照该指令来对该装置的动作进行控制。综合控制装置240可通过一个第一操作输入输出装置310来使任意装置进行动作,并且可通过一个第二操作输入输出装置320来使任意装置进行动作。
[0097]
此外,综合控制装置240可对空调系统ac1、ac2a、ac2b及ac3的动作进行控制。
[0098]
控制装置210~240具备计算机装置。而且,控制装置210~240可具备用于控制供给机器人110~130以及各装置电力的电气电路等。例如,控制装置210~240可配置在容纳室r5。或者,控制装置210~230可配置在机器人110~130上。
[0099]
例如,控制装置210~240的计算机装置包括具有处理器以及存储器等的运算器。运算器进行与其他的装置的指令、信息以及数据等的收发。运算器进行来自各种机器的信号的输入以及向各控制对象的控制信号的输出。存储器由易失性存储器以及非易失性存储器等半导体存储器、硬盘以及ssd(solid state drive,固态硬盘)等储存装置构成。例如,存储器对运算器所执行的程序、以及各种固定数据等进行储存。
[0100]
运算器的功能可通过由cpu(central processing unit,中央处理器)等处理器、ram(random access memory,随机存取存储器)等易失性存储器以及rom(read-only memory,只读存储器)等非易失性存储器等构成的计算机系统(图示略)而实现。计算机系统可通过cpu使用ram作为工件区域来执行rom所存储的程序,从而实现运算器的功能。另外,运算器的功能的一部分或全部可通过上述计算机系统来实现,可通过电子电路或集成电路等专用的硬件电路来实现,还可通过上述计算机系统以及硬件电路的组合来实现。控制装置210~240可分别通过由单一的计算机装置实现的集中控制来执行各处理,还可通过由多个计算机装置的协作实现的分散控制来执行各处理。例如,控制装置210~240的至少2个可统合到单一的计算机装置中。
[0101]
例如,控制装置210~240的各功能可通过微控制器、mpu(micro processing unit,微处理单元)、lsi(large scale integration:大规模集成电路)、系统lsi、plc(programmable gate array,可编程门阵列)以及逻辑电路等来实现。控制装置210~240各自的多个功能可单独成为单芯片,也可以包括部分或全部的方式成为单芯片。此外,电路可分别是通用的电路,也可以是专用的电路。作为lsi,可利用在lsi制造后可进行编程的fpga(field programmable gate array,现场可编程逻辑门阵列)、lsi内部的电路电池的连接和/或设定可再构成的可重构的处理器、或者、面向特定用途的多个功能的电路汇总成一个的asic(application specific integrated circuit,专用集成电路)等。
[0102]
图3所示的检査设备系统1中所含有的各结构要素可经由有线通信或无线通信而互相连接。有线通信以及无线通信的种类可以是任何的种类。
[0103]
[检査设备系统的动作]
[0104]
对第一实施方式所涉及的检査设备系统1中的检査处理的流程的一例进行说明。另外,以下对pcr检査中的检査处理的流程的一例进行说明。
[0105]
如图1~图3所示,首先,被检者p步入诊疗室r1,以隔着隔板w1a面对第一机器人110的方式坐在椅子上。被检者p使用从第一机器人110的提示装置115而输出的医师h1的图像以及声音、和被输入到拍摄装置116以及集音装置117中的被检者p的图像以及声音来与医师h1进行沟通,并且被检者p的脸按照医师h1的指示放到隔板w1a的开口部内。
[0106]
医师h1使用第一操作输入输出装置310来手动操纵第一机器人110,从而使手113或114移动,并使用保持在该手上的检査器具,从被检者p采集检验体。在采集后,医师h1使用第一操作输入输出装置310将第一机器人110的动作控制切换为自动操纵,或者进行表示采集结束的输入。第一操作输入输出装置310向第二操作输入输出装置320发送切换到自动操纵的通知等。
[0107]
检査技师h2经由第二操作输入输出装置320感知到该通知时,向第二操作输入输出装置320输入自动执行检验体的处理的指令。检査技师h2在自动进行检验体的处理时,目视确认映射到第二操作输入输出装置320的提示装置323的各房间的图像,来监视有无发生
异常等。检査技师h2在异常的发生时以及根据需要,使用第二操作输入输出装置320来进行从处理的中止或自动操纵到手动操纵的切换等。
[0108]
综合控制装置240按顺序使第一机器人110以及接纳装置410自动地执行由第一机器人110进行的检验体投向接纳装置410的投入行为、由第一机器人110进行的在接纳装置410中的检验体的分装行为、由接纳装置410进行的检验体的灭活、由第一机器人110进行的灭活检验体从接纳装置410的取出行为、以及由第一机器人110进行的灭活检验体移向第一分析室r3的移送行为。
[0109]
而且,综合控制装置240使卷帘w2a打开隔壁w2的开口部,并使第一机器人110将检验体插入到该开口部。综合控制装置240使第二机器人120进行动作来使第二机器人120接收被插入到开口部的检验体,并使卷帘w2a闭合。
[0110]
接下来,综合控制装置240使第二机器人120按顺序自动执行第一分析的各工序。综合控制装置240在第一分析的全部工序结束后使卷帘w3a打开隔壁w3的开口部,并使第二机器人120将检验体插入到该开口部。综合控制装置240使第三机器人130进行动作来使第三机器人130接收被插入到开口部的检验体,并使卷帘w3a闭合。
[0111]
接下来,综合控制装置240使第三机器人130按顺序自动地执行第二分析的各工序。综合控制装置240在第二分析的全部工序结束后,让第二分析装置430将检出结果的数据输出至结果输出装置600。综合控制装置240使结果输出装置600发行检査结果的凭证。检査技师h2递给被检者p由结果输出装置600发行的、pcr检査的阴性证明等凭证。结果输出装置600也可以将该凭证的数据发送给被检者p的终端装置等其他的装置。
[0112]
另外,综合控制装置240可在检验体从第一机器人110移交给第二机器人120后,将第一机器人110的动作控制切换为手动操纵,并将切换的通知或移交结束的通知输出至第一操作输入输出装置310。由此,医师h1能够进行对下一个被检者p的检验体的采集。
[0113]
如上所述,第一实施方式所涉及的检査设备系统1能够在配置有检査设备系统1的场所中进行来自被检者p的检验体的采集~检验体的检査结果的输出的一系列处理。而且,检査设备系统1可仅使用配置在箱体10内的装置来进行上述的一系列处理。即,检査设备系统1仅通过配置箱体10即可执行在配置场所中的一系列处理。
[0114]
(第一实施方式的变形例1)
[0115]
第一实施方式的变形例1在第二单元部分u2具备第一分析室r3的第一前室r3a和第二分析室r4的第二前室r4a这一点上与第一实施方式不同。以下,关于变形例1,以与第一实施方式不同的点为中心来进行说明,并适当省略与第一实施方式同样的点的说明。
[0116]
图5为表示第一实施方式的变形例1所涉及的检査设备系统1a的结构的一例的截面侧视图。如图5所示,检査设备系统1a的第二单元部分u2在箱体10内具备第一分析室r3的第一前室r3a、和第二分析室r4的第二前室r4a。第一前室r3a位于采集室r2与第一分析室r3之间,第二前室r4a位于第一分析室r3与第二前室r4a之间。第二单元部分u2可分别包含第一前室r3a以及第二前室r4a,以作为形成第一前室r3a的分析单元部分以及形成第二前室r4a的分析单元部分。
[0117]
第一前室r3a通过隔壁w2而与采集室r2隔开,并通过隔壁w6而与第一分析室r3隔开。隔壁w6与隔壁w2同样地具备开口部、和对该开口部进行开闭的卷帘w6a。
[0118]
第二前室r4a通过隔壁w3而与第一分析室r3隔开,并通过隔壁w7而与第二分析室
r4隔开。隔壁w7与隔壁w3同样地具备开口部、和对该开口部进行开闭的卷帘w7a。
[0119]
第二单元部分u2具备对第一前室r3a的空调环境进行调节的第二空调系统ac2c、和对第二前室r4a的空调环境进行调节的第二空调系统ac2d。第二空调系统ac2c能够在采集室r2的空调环境即负压环境与第一分析室r3的空调环境即正压环境之中的至少与第一分析室r3同样的空调环境中,对第一前室r3a的空调环境进行调节。第二空调系统ac2d能够在第一分析室r3的空调环境即正压环境与第二分析室r4的空调环境即负压环境之中的至少与第二分析室r4同样的空调环境中,对第二前室r4a的空调环境进行调节。
[0120]
综合控制装置240(参照图3)对空调系统ac1、ac2a~ac2d以及ac3的动作进行控制。
[0121]
例如,在由第一机器人110进行的来自采集室r2的检验体的移送的情况下,综合控制装置240在使第一前室r3a成为正压环境的状态下,打开隔壁w2的卷帘w2a。接下来,综合控制装置240让第一机器人110使检验体放置到第一前室r3a内的接受台上之后,闭合卷帘w2a。而且,综合控制装置240在使第一前室r3a成为负压环境的状态下打开隔壁w6的卷帘w6a。接下来,综合控制装置240让第二机器人120使第一前室r3a内的接受台的检验体移送到第一分析室r3内,并闭合卷帘w6a。另外,第一前室r3a可以是正压环境。由此,能可靠地抑制存在于空气中的病原体从采集室r2侵入第一分析室r3。
[0122]
例如,在由第二机器人120进行的来自第一分析室r3的检验体的移送的情况下,综合控制装置240在使第二前室r4a成为正压环境的状态下打开隔壁w3的卷帘w3a。接下来,综合控制装置240让第二机器人120使检验体放置到第二前室r4a内的接受台上之后,闭合卷帘w3a。而且,综合控制装置240在使第二前室r4a成为负压环境的状态下打开隔壁w7的卷帘w7a。接下来,综合控制装置240让第三机器人130使第二前室r4a内的接受台的检验体移送到第二分析室r4内,并闭合卷帘w7a。由此,能可靠地抑制存在于空气中的病原体从第一分析室r3侵入第二分析室r4。
[0123]
根据上述那样的第一实施方式的变形例1所涉及的检査设备系统1a,能可靠地抑制存在于空气中的病原体在房间之间移动。
[0124]
(第一实施方式的变形例2)
[0125]
第一实施方式的变形例2在第一操作输入输出装置310以及第二操作输入输出装置320的至少一方配置在远离箱体10的位置的点上与第一实施方式不同。以下,关于变形例2,以与第一实施方式及变形例1不同的点为中心来进行说明,并适当省略与第一实施方式以及变形例1同样的点的说明。
[0126]
图6为表示第一实施方式的变形例2所涉及的检査设备系统1b的结构的一例的截面侧视图。如图6所示,本变形例所涉及的检査设备系统1b中,第三单元部分u3不具备操作输入输出装置310及320。第三单元部分u3在容纳室r5具备结果输出装置600,结果输出装置600能够将阴性凭证等的检査结果直接输出至箱体10的外部的被检者p。在本变形例中,容纳室r5未容纳医疗从业者h1及h2。
[0127]
此外,检査设备系统1b在远离箱体10的位置具备第五单元部分u5。第五单元部分u5既可配置在一个场所,也可配置在多个场所。第五单元部分u5具备第一操作输入输出装置310以及第二操作输入输出装置320的至少一方。
[0128]
本例中,第五单元部分u5被配置在互相远离的2个场所。一个第五单元部分u5具备
容纳第一操作输入输出装置310的操作室r6a,一个第五单元部分u5具备容纳第二操作输入输出装置320的操作室r6b。2个第五单元部分u5可分别具备包括操作室r6a及r6b的箱体,并与该箱体一起配置,也可以利用现有设施的房间等的空间作为操作室r6a及r6b,并配置在该空间内。
[0129]
操作输入输出装置310及320均经由通信网络n而与综合控制装置240(参照图3)进行通信。由此,医师h1能够使用第一操作输入输出装置310对包含机器人110~130等的箱体10内的各装置进行远程操作,检査技师h2能够使用第二操作输入输出装置320对包含机器人110~130等的箱体10内的各装置进行远程操作。
[0130]
通信网络n既可以是有线通信网络,也可以是无线通信网络。例如,通信网络n可包含自组织
·
网络(adhoc network)、内网、外网、虚拟私有
·
网络(virtual private network:vpn)、局部
·
区域
·
网络(local area network:lan)、无线lan(wireless lan:wlan)、广域网络(wide area network:wan)、无线wan(wireless wan:wwan)、大都市圈网络(metropolitan area network:man)、互联网的一部分、公共交换电话网(public switched telephone network:pstn)的一部分、移动电话网、isdns(integrated service digital networks,综合业务数字网)、无线lans、lte(long term evolution长期演进)、cdma(code division multiple access,编码部分多址)、蓝牙(bluetooth(注册商标))、卫星通信等、或者它们的2个以上的组合。通信网络n可包含一个或多个网络。
[0131]
经由通信网络n而与综合控制装置240(参照图3)进行通信的操作输入输出装置310及320既可配置在与箱体10同一建筑物或同一场地内,也可配置在远离它们的远程地。
[0132]
此外,一个箱体10的综合控制装置240(参照图3)可经由通信网络n与2个以上的第一操作输入输出装置310和/或2个以上的第二操作输入输出装置320进行通信。由此,处于各种场所的多个医师h1以及多个检査技师h2能够对箱体10内的各装置进行操作。例如,多个医师h1以及多个检査技师h2交替并对各装置进行操作,从而可24小时任何时间执行检査处理。
[0133]
另外,本变形例中,操作输入输出装置310及320经由通信网络n与综合控制装置240(参照图3)进行通信,但也可以不经由通信网络n与综合控制装置240进行有线通信或无线通信。
[0134]
根据上述那样的第一实施方式的变形例2所涉及的检査设备系统1b,无需医师h1以及检査技师h2常驻在配置有箱体10的场所。可减少参与检査设备系统1b的医师h1以及检査技师h2的人数。
[0135]
本变形例中,操作输入输出装置310及320被配置在各自的操作室r6a及r6b,但并不局限于此,也可配置在一个操作室r6。
[0136]
此外,也可在箱体10内配置第五单元部分u5的一部分。即,可操作输入输出装置310及320的一方配置在箱体10内。在该情况下,箱体10内的第三单元部分u3的一部分可兼顾第五单元部分u5的一部分。
[0137]
(检査设备系统在机场中的配置例)
[0138]
对第一实施方式所涉及的检査设备系统1的配置例进行说明。图7为表示第一实施方式所涉及的检査设备系统1在机场ap中的配置例的框图。图7中,实线的箭头表示在机场ap出发的航空器的乘客的流程,虚线的箭头表示到达机场ap的航空器的乘客的流程。单点
划线的箭头表示数据通信的流程。如图7所示,在机场ap存在有航站楼ab,而且还存在有铁道以及巴士的站台ac、出租车的乘车场ad以及停车场ae等。乘客在站台ac、乘车场ad以及停车场ae与航站楼ab的出入口ab1之间往来。
[0139]
航站楼ab包括出入口ab1、用于登机手续的值机柜台ab2、x射线检査以及使用金属探测仪等的安检区ab3、登机等候区域ab4、登机口ab5、行李提取区ab6、到达口ab7。在机场ap出发的航空器的乘客按顺序步入值机柜台ab2、安检区ab3、登机等候区域ab4以及登机口ab5。到达机场ap的航空器的乘客按顺序步入行李提取区ab6以及到达口ab7。
[0140]
检査设备系统1的箱体10被配置在出入口ab1、值机柜台ab2以及安检区ab3的至少一个,在本例中,全部配置。由此,能抑制未接受检査的乘客通过安检区ab3。而且,检査设备系统1的箱体10被配置在行李提取区ab6以及到达口ab7的至少一个,在本例中,全部配置。由此,能抑制未接受检査的乘客通过到达口ab7。
[0141]
在存在有多个航站楼ab的情况下,可在每个航站楼ab中,在上述的场所配置检査设备系统1的箱体10。
[0142]
检査设备系统1可在配置有该检査设备系统1的场所中,向乘客发行检査结果的凭证、或者、在乘客的机票等的携带物上输入检査结果的凭证的数据。或者,检査设备系统1也可以将检査结果的凭证的数据发送给其他的场所。送信地可以是乘客肯定会停留的场所、即值机柜台ab2、安检区ab3以及到达口ab7的至少一个。
[0143]
此外,航站楼ab的检査设备系统1可经过通信的方式从航站楼ab的外部的设施,收到该设施中实施的登机预定者的检査结果的凭证的数据。例如,外部的设施为,医院、保健所以及检査设施等医疗关联设施af、以及、与机场ap相邻或位于附近的住宿设施ag、以及、乘客出发的其他的机场apa等。医疗关联设施af以及住宿设施ag可位于机场ap的场地内,也可位于该场地外。
[0144]
在外部的设施不具备检査设备的情况下,在外部的设施配置检査设备系统1,该检査设备系统1可向航站楼ab的检査设备系统1发送数据。尽管在图7中数据被发送给值机柜台ab2的检査设备系统1,但也可以发送给其他的检査设备系统1。航站楼ab的检査设备系统1可基于检査的实施时期以及实施设施等信息,来评价外部的设施的凭证的信用度,并发行有信用性的凭证以作为自身的凭证。由此,可降低乘客的等待时间。
[0145]
另外,检査设备系统1的箱体10不仅可配置在航站楼ab,还可配置在站台ac、乘车场ad以及停车场ae。航站楼ab、站台ac、乘车场ad、停车场ae以及外部的设施等所配置的检査设备系统1可不具备箱体10,也可利用现有的设施来配置。
[0146]
(第二实施方式)
[0147]
参照图8~图19对第二实施方式的检査系统1100进行说明。第二实施方式的检査系统1100是从被检者采集检验体,并进行采集到的检验体的测量的检査。例如,检査系统1100用于进行感染性病毒的rt-pcr检査。感染性病毒并未特别地限制,但covid-19是一例。另外,检査系统1100为检査设备系统的一例。
[0148]
如图8以及图9所示,检査系统1100具备第一单元1001、第二单元1002、第三单元1003。此外,检査系统1100的第一单元1001、第二单元1002以及第三单元1003分别设置有机器人1004。此外,第一单元1001、第二单元1002以及第三单元1003被设置在集装箱1005内。另外,第一单元1001、第二单元1002以及第三单元1003之中至少一个被设置在集装箱1005
内即可。由此,能够容易地搬运并设置检査系统1100。
[0149]
此外,检査系统1100具备将第一单元1001、第二单元1002以及第三单元1003互相连接的搬运部1006a及1006b。具体地,第一单元1001以及第二单元1002通过搬运部1006a而连接。此外,第二单元1002以及第三单元1003通过搬运部1006b而连接。由此,能通过搬运部1006a及1006b容易地进行第一单元1001、第二单元1002以及第三单元1003间的检验体的移动。
[0150]
第一单元1001采集检验体并接收检验体。例如,第一单元1001进行如下处理,即,从被检者采集检验体,并用稀释液来稀释采集到的检验体。此外,第一单元1001进行稀释了的检验体的搅拌处理。此外,第一单元1001进行稀释了的检验体的离心分离处理。第二单元1002与第一单元1001连接来进行如下处理,即,对检验体进行测量之前的前处理。例如,第二单元1002进行灭活处理,以作为检验体的前处理。此外,第二单元1002进行核酸提取处理,以作为检验体的前处理。第三单元1003与第二单元1002连接来进行如下测量,进行了前处理的检验体的测量。例如,第三单元1003进行如下处理,即,通过rt-pcr检査来测量检验体中是否包含感染性病毒的处理。
[0151]
分别设置在检査系统1100的第一单元1001、第二单元1002以及第三单元1003的机器人1004分别对检验体进行处理。例如,机器人1004进行容纳有检验体的容器的搬运、开箱、闭箱。此外,机器人1004进行检验体、试剂的分装。此外,机器人1004进行处理所需的容器、试剂、托盘等物的搬运。另外,机器人1004被设置在第一单元1001、第二单元1002以及第三单元1003中至少一个即可。
[0152]
此外,检査系统1100被配置在用于乘上和乘下移动体的移动据点。例如,检査系统1100被配置在作为移动据点的机场、站台、巴士终点站、轮渡码头。移动体例如为航空器、列车、巴士、船舶。由此,能在移动据点中通过检查系统1100来进行传染病的检査,因此能够在移动据点中直接确认传染病的阳性或阴性。其结果为,能有效地阻止传染病从移动据点扩散。
[0153]
对检査系统1100配置在机场的情况的示例进行说明。机场存在有航站楼,而且还存在有铁道以及巴士的站台、出租车的乘车场以及停车场等。航空器的乘客在站台、乘车场以及停车场与航站楼的出入口之间往来。
[0154]
航站楼包括出入口、用于登机手续的值机柜台、x射线检査以及使用金属探测仪等的安检区、登机等候区域、登机口、行李提取区、到达口。在机场出发的航空器的乘客按顺序步入值机柜台、安检区、登机等候区域以及登机口。到达机场的航空器的乘客按顺序步入行李提取区以及到达口。
[0155]
而且,检査系统1100被配置在出入口、值机柜台以及安检区的至少一个。由此,能阻止未接受检査的乘客通过安检区。而且,检査系统1100可配置在行李提取区以及到达口的至少一个。由此,可阻止未接受检査的乘客通过到达口。
[0156]
机场存在有多个航站楼的情况下,可在每个航站楼的上述的场所配置检査系统1100。此外,检査系统1100不仅可配置在航站楼,还可配置在站台、乘车场以及停车场。
[0157]
第一单元1001采集唾液检验体或鼻腔检验体并收纳检验体。如图10所示,在第一单元1001设置有作为用于处理检验体的机器人1004的第一机器人1004a。第一机器人1004a包括机器人臂1041及1042。即,第一机器人1004a通过2个机器人臂来进行处理。此外,机器
人臂1041及1042分别包括水平关节、和与水平关节连接的升降机构。水平关节使机器人臂1041(1042)的前端在水平方向进行移动。此外,升降机构使机器人臂1041(1042)的前端在上下方向(高度方向)进行移动。
[0158]
第一单元1001包括配置有被检者的被检者区域1011。此外,第一单元1001包括以与被检者区域1011间隔的方式配置,并配置有用于处理检验体的第一机器人1004a的机器人区域1012。
[0159]
如图10所示,被检者区域1011通过间隔部1111而间隔出多个展台。由此,可阻止多个被检者彼此的感染。此外,被检者区域1011与机器人区域1012通过间隔部1112而间隔开。由此,可阻止被检者进入机器人区域1012。
[0160]
第一单元1001包括对采集到的检验体进行称量的称量部1014。此外,第一单元1001根据由称量部1014称量的检验体的量来调节稀释液的量,从而对检验体进行稀释。即,以如下方式来进行检验体的稀释,即,在检验体的量少的情况下,减少稀释液的量,在检验体的量多的情况下,增多稀释液的量。由此,能以检验体的浓度处在合适的范围的方式来稀释。另外,第一单元1001可通过包括灭活病毒的灭活成分在内的稀释液来对采集到的检验体进行稀释。由此,能在稀释检验体的同时进行灭活处理。
[0161]
第一单元1001包括供给用于稀释检验体的稀释液的稀释液供给部1016。稀释液供给部1016对被第一机器人1004a握持的检验体采集容器1007a供给稀释液。
[0162]
第一单元1001包括在由称量部1014称量的检验体的量不足的情况下,向被检者通知检验体的再采集的通知部1113。通知部1113例如设置在被检者区域1011。通知部1113例如为显示图像的显示部。另外,通知部1113可以是输出声音的扬声器。由此,能够抑制因检验体的量不足而无法正确进行检査。
[0163]
在第一单元1001设置有紫外线照射部1017a。第一机器人1004a通过紫外线照射部1017a对第一单元1001内进行灭菌处理。具体地,第一机器人1004a通过在紫外线照射部1017a的紫外线灯点亮的状态下,握持紫外线照射部1017a在第一单元1001的机器人区域1012内照射紫外线,来进行灭菌处理。由此,能够用紫外线对第一单元1001进行灭菌,因此能够有效地抑制污染、感染。
[0164]
第一单元1001如图11所示,将检验体采集并收纳在标注有检验体采集标准量的检验体采集容器1007a中。由此,能够容易掌握被检者供出检验体的量,因此能够容易不会过多或过少地采集检验体。检验体采集容器1007a可由盖1071封堵。此外,检验体采集容器1007a上被贴附有印刷了包含被检者的信息的标识(例如条形码)以及检验体采集标准量的标签。
[0165]
第一单元1001如图10所示,包括用于消毒采集有检验体的检验体采集容器1007a的外表面的消毒液槽1015。消毒液槽1015如图12所示,在槽内配置有海绵1151。海绵1151中浸入有消毒液(例如,乙醇、次氯酸水)。此外,海绵1151上设置有可供检验体采集容器1007a插入的多个孔1152。在海绵1151的孔1152中插入检验体采集容器1007a,来用消毒液消毒检验体采集容器1007a的外表面。由此,能够对检验体采集容器1007a的外表面进行消毒,因此能够有效地抑制污染、感染。
[0166]
第一单元1001如图13所示,包括将采集有检验体的检验体采集容器1007a从被检者区域1011搬运到机器人区域1012的检验体采集容器搬运部1013。检验体采集容器搬运部
1013具有放置检验体采集容器1007a的放置部1131、和通过空气压来进行驱动的空气气缸(air cylinder)1132。此外,检验体采集容器搬运部1013通过空气气缸1132的驱动使放置部1131移动来对检验体采集容器1007a进行搬运。检验体采集容器搬运部1013可基于闭合配置在被检者区域1011中的盖罩(cover)1133,使放置部1131从被检者区域1011移动到机器人区域1012。在此,盖罩1133被设置为,可绕水平方向的转动轴来转动。盖罩1133可移动到向下转动来覆盖放置部1131的闭位置、和向上转动而使放置部1131露出的开位置。而且,可基于盖罩1133移动到闭位置将放置部1131从被检者区域1011移动到机器人区域1012。此外,检验体采集容器搬运部1013可基于操作配置在被检者区域1011的开关1134,使放置部1131从被检者区域1011移动到机器人区域1012。移动到机器人区域1012的放置部1131所放置的检验体采集容器1007a被第一机器人1004a握持并被带入到机器人区域1012。由此,能够可靠地隔离被检者区域1011以及机器人区域1012的同时,将检验体容易地从被检者区域1011移动到机器人区域1012。
[0167]
如图10所示,第一单元1001包括对被检者区域1011的空气的流通进行调节的空调部1121。空调部1121使被检者区域1011的环境成为正压或负压。由此,能够使被检者区域1011保持清洁。
[0168]
第一单元1001包括对用于处理检验体的第一机器人1004a进行灭菌处理的灭菌部1017b。由此,能够对第一机器人1004a进行灭菌,因此能够有效地抑制污染、感染。
[0169]
第一单元1001包括对容纳有由稀释液稀释的检验体的检验体采集容器1007a进行搬运的搬运部1061。搬运部1061将检验体采集容器1007a朝向下游的第一机器人1004b进行搬运。
[0170]
第一单元1001包括可离心分离多个检验体的第一离心分离机1018。此外,第一单元1001在每个规定时间驱动第一离心分离机1018来进行检验体的离心分离处理。即,即使第一离心分离机1018未满载检验体,也会在每个规定时间进行离心分离处理。由此,能够抑制因等待检验体存放而造成对检验体的处理延误。
[0171]
第一单元1001包括作为用于处理检验体的机器人1004的第一机器人1004b。第一机器人1004b具有垂直多关节机器人臂1043。第一机器人1004b将由搬运部1061搬运的检验体采集容器1007a搬运至震荡部1019,并在震荡处理后,搬运至第一离心分离机1018。此外,第一机器人1004b将离心分离处理后的检验体采集容器1007a搬运至搬运部1006a。
[0172]
第一单元1001利用第一机器人1004b在第一离心分离机1018设置平衡用离心沉淀管,并驱动第一离心分离机1018来进行检验体的离心分离处理。由此,在每个规定时间进行离心分离处理,从而即使在进行离心分离处理的检验体采集容器1007a的个数每次不同的情况下,仍能够通过平衡用离心沉淀管来调节平衡。
[0173]
第一单元1001包括对用于取得第一离心分离机1018内的检验体的位置的图像进行拍摄的拍摄部1181。此外,第一单元1001通过用于处理检验体的第一机器人1004b,从第一离心分离机1018将检验体(检验体采集容器1007a)取出。具体地,第一单元1001基于由拍摄部1181所拍摄的图像,来对第一离心分离机1018内的检验体采集容器1007a的位置进行识别。而且,第一单元1001利用第一机器人1004b来取出识别到的位置的检验体采集容器1007a。由此,能够利用第一机器人1004b从第一离心分离机1018容易地取出检验体采集容器1007a。
[0174]
第一单元1001再检查检验体的情况下,由第二单元1002收纳再检査用的检验体,并将收纳的再检査用的检验体投入到第一离心分离机1018的离心分离处理。由此,无需再次采集检验体便能够进行检验体的再检査。
[0175]
第一单元1001包括使检验体震荡的震荡部1019。震荡部1019可放置多个检验体采集容器1007a。此外,震荡部1019被用于对放置的检验体采集容器1007a内的检验体进行搅拌。此外,震荡部1019周期性地移动放置的检验体采集容器1007a并进行震荡。此外,震荡部1019在震荡处理终止后停止于固定的位置。由此,第一机器人1004b只要到将检验体采集容器1007a放置于震荡部1019的位置拿取震荡后的检验体采集容器1007a即可,因此能够利用第一机器人1004b容易地从震荡部1019取出检验体采集容器1007a。
[0176]
如图14所示,在第二单元1002设置有作为将稀释了的检验体分装到具有多个孔(well)1073的板1007b上的机器人1004的第二机器人1004c。板1007b例如图16所示,具有8列12行的96深孔。第二机器人1004c包括具有水平关节的机器人臂1041及1042。
[0177]
此外,在第二单元1002设置有作为将板1007b供给至分装位置的机器人1004的第三机器人1004d。第三机器人1004d具有垂直多关节机器人臂1043。第三机器人1004d握持从给送器1023供给的空的板1007b并搬运至供给台1631。此外,第三机器人1004d使由搬运部1006a搬运的检验体采集容器1007a移动至搬运部1062。此外,第三机器人1004d将从给送器1023供给的吸头架搬运至吸头供给滑动器1064。此外,第三机器人1004d将容纳的检验体的一部分在板1007b上分装完成的检验体采集容器1007a从搬运部1062搬运至保管架1022。此外,第三机器人1004d将从排出台1635排出的板1007b搬运至搬运部1065。
[0178]
第二机器人1004c将检验体从由搬运部1062搬运的检验体采集容器1007a分装到板1007b。
[0179]
第二单元1002包括用规定时间搬运板1007b并使板上的检验体灭活的板搬运部1063。板搬运部1063包括搬运部1632、搬运部1633、搬运部1634。板搬运部1063的搬运部1632、搬运部1633以及搬运部1634以围绕第二机器人1004c的方式配置成大致u字形状。
[0180]
搬运部1632将板1007b从供给台1631搬运至搬运部1633。供给台1631中,灭活液、洗净液a、洗净液b、溶出液(水)被供给至板1007b。搬运部1633中,检验体从检验体采集容器1007a分装到板1007b。而且,搬运部1633用灭活所需的时间(例如10分钟)将板1007b搬运至搬运部1634。搬运部1634将板1007b搬运至排出台1635。由此,能够对多个板1007b并行进行灭活处理。
[0181]
第二单元1002包括将一部分的检验体从采集了检验体的检验体采集容器1007a分装到板1007b之后,在规定时间保管容纳有剩余的检验体的检验体采集容器1007a的保管架1022。保管架1022例如保管2小时检验体采集容器1007a。由此,能够在需要再检査的情况下,从保管架1022上取出检验体并进行再检査,因此无需再次采集检验体。
[0182]
第二单元1002包含具有稀释了的检验体被第二机器人1004c分装到板1007b上的内部空间的储藏柜1021。即,第二机器人1004c在储藏柜1021的内部空间内让手(末端执行器)移动的同时进行驱动。由此,能够在储藏柜1021内分装检验体,因此能够有效地抑制检验体向外部扩散而造成感染的风险提高。
[0183]
第二单元1002包括将用于分装稀释了的检验体的吸头废弃的射出部1241。射出部1241所废弃了的吸头移动并容纳在废弃箱1024。由此,能够容易地废弃掉使用完成的吸头。
[0184]
第二单元1002如图16所示,相对于板1007b的多个孔1073,以隔着空的孔1073的方式来分装多个稀释了的检验体。由此,能够隔开间隔来分装检验体,因此能够有效地抑制污染。
[0185]
第二单元1002如图15所示,包括作为进行核酸提取处理的机器人1004的多个机器人1004e。机器人1004e具有垂直多关节机器人臂1043。在核酸提取处理中,由搬运部1065来搬运板1007b。由搬运部1065搬运的板1007b被机器人1004e移动到工作台上进行核酸提取处理。第二单元1002包括磁石部1025、吸头架搁置处1026、加温部1027、震荡部1028、废弃箱1029。此外,第二单元1002包括磁性粒子供给部1025a和吸头架搁置处1026a。
[0186]
磁石部1025被用于收集从磁性粒子供给部1025a被供给至板1007b的检验体中的磁性粒子。具体地,磁石部1025在放置有板1007b的状态下,使磁石作用于板1007b的检验体来进行集磁。
[0187]
吸头架搁置处1026放置从吸头架搁置处1026a供给的吸头架。此外,使用完成的吸头架被返还至吸头架搁置处1026a。
[0188]
加温部1027对板1007b的检验体进行加温。震荡部1028震荡并搅拌板1007b的检验体。
[0189]
废弃箱1029废弃用于分装检验体的吸头、板1007b。此外,废弃箱1029如图17所示,具有容纳部1291和锥形部1292。即,废弃箱1029的前端(入口)被形成为锥形形状。由此,能够抑制液飞溅。
[0190]
第三单元1003如图18所示,包括制备用于进行检验体测量的试剂的试剂制备室1031、和测量检验体的测量室1032。试剂制备室1031被设为正压。测量室1032被设为负压。由此,能够抑制试剂制备室1031内悬浮的异物侵入。此外,还能够抑制病毒从测量室1032流出。
[0191]
第三单元1003包括打开和关闭使试剂制备室1031与测量室1032连通的开口的卷帘1033。卷帘1033在试剂制备室1031与测量室1032之间交换物品的情况下被打开,除此以外的情况下被封堵。由此,能够可靠地将试剂制备室1031以及测量室1032隔离的同时,能够容易地使检验体、制备的试剂从试剂制备室1031移动至测量室1032。
[0192]
第三单元1003包括作为进行试剂制备处理的机器人1004的机器人1004f。机器人1004f具有垂直多关节机器人臂1043。此外,在第三单元1003的试剂制备室1031中设置有冰柜1311、冰箱1312、开箱装置1313、制备场所1314、吸头搁置处1315、和废弃箱1316。
[0193]
冰柜1311中保管有冰点下(例如-18℃)保管的试剂(enzyme mix)。此外,冰箱1312中还保管有低温(例如,4℃)保管的试剂(reaction mix)。试剂(enzyme mix)和试剂(reaction mix)配合使用并被混合制备。
[0194]
即,第三单元1003基于检验体的检査的受理状况而通过试剂制备室1031来进行试剂的制备。由此,能够不会过多或过少地制备试剂。
[0195]
开箱装置1313对试剂的容器进行开箱。在制备场所1314,试剂(enzyme mix)与试剂(reaction mix)以混合的方式制备。
[0196]
第三单元1003包括作为进行将检验体供给至检验体测量部1034的处理的机器人1004的第四机器人1004g。第四机器人1004g具有垂直多关节机器人臂1043。此外,在第三单元1003的测量室1032中还包括多个检验体测量部1034、第二离心分离机1035、装管(tube)
保持部1036、盖闭合部1037、和废弃箱1038。
[0197]
检验体测量部1034在可容纳多个检验体的多个装管1074连接的多支装管1007c容纳检验体的状态下对检验体进行测量。检验体测量部1034例如进行rt-pcr的测量。如图19所示,多支装管1007c例如,8个装管1074呈直线状连结。此外,多支装管1007c的装管1074各自与盖1075连结。盖1075通过弯折连结部来封堵装管1074。
[0198]
第三单元1003包括检测多支装管1007c的盖1075打开的开状态检测部1034a。由此,无论多支装管1007c的盖1075是否开着,都能够抑制多支装管1007c被处理,因此能够有效地抑制因多支装管1007c的盖1075开着而造成的污染。
[0199]
第二离心分离机1035对检验体进行离心分离。此外,第二离心分离机1035在离心分离处理终止后对准停止位置再停止。由此,第四机器人1004g到对准的停止位置拿取离心分离处理后的检验体即可,因此能够利用第四机器人1004g容易地从第二离心分离机1035取出离心分离处理后的检验体。
[0200]
装管保持部1036保持着多个多支装管1007c。具体地,装管保持部1036在上下方向上重叠地保持多支装管1007c。
[0201]
第四机器人1004g搬运多支装管1007c。此外,第三单元1003进行如下处理,即,利用第四机器人1004g从装管保持部1036将多支装管1007c取出至下方,并且将检验体分装到多支装管1007c后,在各异的时间点弯曲并封堵多个装管1074各自连接的盖1075。
[0202]
具体地,盖闭合部1037如图19所示,多支装管1007c的多个盖1075各自抵接的多个抵接部1371在俯视观察下的位置呈阶梯状错开。由此,多支装管1007c的多个盖1075与抵接部1371抵接的时间点各异。其结果为,能够容易地将多支装管1007c的多个盖1075闭合。
[0203]
此外,第三单元1003在规定的时间点对用于管理检査精度的管理试剂进行测量。由此,能够有效地抑制检査精度降低。
[0204]
(第三实施方式)
[0205]
参照图20对第三实施方式的检査系统1200进行说明。
[0206]
如图20所示,检査系统1200具备机场pcr系统1210和检査主体系统1220。
[0207]
机场pcr系统1210具备受理柜台1211、检验体采集机器人模块1212、离心机器人模块1213、开箱分装机器人模块1214、核酸提取机器人模块1215、测量机器人模块1216、控制装置1217。
[0208]
受理柜台1211将检验体容器供给至被检者p。受理柜台1211受理多个检验体。在此,检验体是用于传染病检査的检验体。此外,传染病检査是使用了pcr法的检査。
[0209]
检验体采集机器人模块1212包括多个(4台)第一机器人1212a。多个第一机器人1004a各自通过2个机器人臂来进行处理。此外,机器人臂各自包括水平关节、和与水平关节连接的升降机构。第一机器人1212a保持着放入了从被检者p采集到的检验体的检验体采集容器1007a,并且对检验体采集容器1007a进行消毒。第一机器人1212a向检验体采集容器1007a内供给用于稀释检验体的稀释液。第一机器人1212a将放入了稀释的检验体的检验体采集容器1007a放置到搬运部1221。另外,检验体采集机器人模块1212可包含1台、2台、3台或5台以上的第一机器人1212a。
[0210]
离心机器人模块1213包括多个(2台)机器人1213a。多个第一机器人1004b各自具有垂直多关节机器人臂。机器人1213a将由搬运部1221搬运的检验体采集容器1007a投入到
搅拌机中。机器人1213a将搅拌后的检验体采集容器投入到离心机。另外,离心机器人模块1213可包含1台、或者3台以上的机器人1213a。
[0211]
在此,设置有离心机器人模块1213的展台中贮存有规定数(4个以上)由搬运部1221搬运的检验体采集容器1007a。机器人1213a针对贮存的规定数的检验体容器,配合进行处理的优先顺位而投入到离心机。机器人1213a将离心分离后的检验体采集容器放置到搬运部1222。
[0212]
开箱分装机器人模块1214包括第二机器人1214a和第三机器人1214b。第二机器人1214a包括具有水平关节的2个机器人臂。第三机器人1214b包括垂直多关节机器人臂。第二机器人1214a对由搬运部1222搬运的检验体采集容器1007a进行开箱。第二机器人1214a在将检验体采集容器1007a开箱后,将检验体采集容器1007a内的检验体分装到板1007b(96孔深孔板)。第二机器人1214a将多个试剂分装到板1007b(96孔深孔板)。第三机器人1214b将分装有检验体及试剂的板1007b(96孔深孔板)放置到搬运部1223。
[0213]
核酸提取机器人模块1215包括多个(5台)机器人1215a。机器人1215a具有垂直多关节机器人臂。机器人1215a使由搬运部1223搬运的板1007b(96孔深孔板)移动到工作台。机器人1215a对工作台上的板1007b(96孔深孔板)进行核酸提取操作。机器人1215a将提取的核酸分装到多支装管1007c(8支pcr装管)。机器人1215a将分装有从检验体所提取的核酸的多支装管1007c(8支pcr装管)放置到搬运部1224。另外,核酸提取机器人模块1215可包括1台、2台、3台、4台、或者6台以上的机器人1215a。
[0214]
测量机器人模块1216包括机器人1216a和第四机器人1216b。机器人1216a具有垂直多关节机器人臂。第四机器人1216b具有垂直多关节机器人臂。机器人1216a制备2种试剂。机器人1216a使由搬运部1224搬运的多支装管1007c(8支pcr装管)移动到工作台。机器人1216a将制备的试剂分装到工作台上的多支装管1007c(8支pcr装管)并且进行抽吸搅拌。第四机器人1216b将多支装管1007c(8支pcr装管)的盖闭合后投入到离心机中。第四机器人1216b将放入了离心分离的检验体的多支装管1007c(8支pcr装管)安置在热循环仪。第四机器人1216b将加热了的多支装管1007c(8支pcr装管)安置在pcr检査装置。
[0215]
控制装置1217在从多个检验体之中确定要检査的优先检査检验体后,进行从检査检验体起开始按顺序处理的控制。具体地,控制装置1217包括cpu(central processing unit,中央处理器)、和具有rom(read only memory,只读储存器)及ram(random access memory,随机存储器)的储存部。储存部中储存有pcr系统管理程序。控制装置1217基于pcr系统管理程序来对机场pcr系统1210进行管理及控制。
[0216]
检査主体系统1220基于pcr检査装置的检査结果来判断被检者p为阳性或阴性。检査主体系统1220发行包括pcr检査装置的检査结果的信息在内的文件。具体地,检査主体系统1220包括cpu、和具有rom及ram的储存部的控制部1220a。储存部中储存有检査结果判断程序。控制部1220a基于检査结果判断程序来对检査主体系统1220进行控制。
[0217]
(第四实施方式)
[0218]
参照图21~图31对第四实施方式的检査系统1300进行说明。在该第四实施方式中,针对不同于第二实施方式、未在第二单元1002a的开箱分装单元1500设置储藏柜1021的结构进行说明。如后所述,第四实施方式的第二单元1002a的开箱分装单元1500由多个机器人进行处理,因此未设置预防人体感染的储藏柜1021。此外,通过未设置储藏柜1021,从而
能够拓宽要设置的机器人的选择面。例如,可选择更小型的机器人,或者选择可进行提高间歇时间的高速的动作的机器人。
[0219]
如图21所示,检査系统1300具备第一单元1001、第二单元1002a、和第三单元1003。第二单元1002a包括开箱分装单元1500。此外,在检査系统1300的第一单元1001中设置有机器人1004a及1004b。此外,在检査系统1100的第二单元1002a中设置有机器人1511、1521、1522、1531及1004e。此外,在检査系统1300的第三单元1003中设置有机器人1004f及1004g。此外,第一单元1001、第二单元1002a以及第三单元1003被设置在集装箱1005内。另外,第一单元1001、第二单元1002a以及第三单元1003之中至少一个被设置在集装箱1005内即可。由此,能够容易地搬运并设置检査系统1300。
[0220]
此外,检査系统1300具备将第一单元1001、第二单元1002a以及第三单元1003互相连接的搬运部1006a及1006b。具体地,第一单元1001以及第二单元1002a通过搬运部1006a而连接。此外,第二单元1002a以及第三单元1003通过搬运部1006b而连接。由此,能够通过搬运部1006a及1006b容易地进行第一单元1001、第二单元1002a以及第三单元1003间的检验体的移动。
[0221]
第一单元1001采集检验体并收纳检验体。例如,第一单元1001进行如下处理,即,从被检者采集检验体,并用稀释液来稀释采集到的检验体。此外,第一单元1001进行稀释完的检验体的搅拌处理。此外,第一单元1001进行稀释完的检验体的离心分离处理。第二单元1002a与第一单元1001连接,并对检验体进行测量前的前处理。例如,第二单元1002a进行如下处理,即,作为检验体的前处理,在开箱分装单元1500中,进行检验体的分装。此外,第二单元1002a进行如下处理,即,作为检验体的前处理,在开箱分装单元1500中,进行试剂的分装处理。此外,第二单元1002a进行如下处理,即,在开箱分装单元1500的下游处,作为检验体的前处理,进行核酸提取处理。第三单元1003与第二单元1002a连接,并进行经前处理过的检验体的测量。例如,第三单元1003进行如下处理,即,通过rt-pcr检査来测量检验体中是否含有感染性病毒。
[0222]
(开箱分装单元的结构)
[0223]
如图22及图23所示,在开箱分装单元1500中设置有检验体保管部1510、检验体分装部1520、工件搬运部1530、和试剂分装部1540。此外,开箱分装单元1500保持在气压低于第二单元1002a的开箱分装单元1500的外部的负压。
[0224]
(检验体保管部的结构)
[0225]
检验体保管部1510保管着多个检验体采集容器1007a。具体地,检验体保管部1510在将一部分的检验体从采集了检验体的检验体采集容器1007a分装到板1007b后,在规定时间保管容纳有剩余的检验体的检验体采集容器1007a。检验体保管部1510例如保管2小时检验体采集容器1007a。由此,能够在需要再检査的情况下,从检验体保管部1510取出检验体并进行再检査,因此无需再次采集检验体。
[0226]
检验体保管部1510包括移动机器人1511、保管部1512、废弃部1513、检验体放置部1514、和qc保管部1515。
[0227]
移动机器人1511使保管部1512的检验体采集容器1007a移动。此外,移动机器人1511从第一单元1001(参照图21)接收检验体采集容器1007a并放置到检验体放置部1514。此外,移动机器人1511使分装有检验体的检验体采集容器1007a从检验体放置部1514移动
至保管部1512。此外,移动机器人1511将规定时间保管的检验体采集容器1007a废弃于废弃部1513。
[0228]
移动机器人1511如图22所示,包括机器人本体1511a、和安装在机器人本体1511a的前端的手1511b。机器人本体1511a为包括多个垂直关节的垂直多关节机器人。手1511b如图24所示,可握持多个(4个)检验体采集容器1007a。手1511b具有多个(4个)组的夹头15111。夹头15111各自具有3个爪,并通过开闭3个爪来握持检验体采集容器1007a。4组夹头15111之中、3组夹头15111通过共用的气压源而被驱动。此外,4组夹头15111之中剩余的1组夹头15111通过不同于其他的3组的夹头15111的气压源而独立地被驱动。由此,可单独握持优先于其他的检验体进行前处理而测量的检验体即插队的检验体等需要单独握持的检验体采集容器1007a。
[0229]
如图22及图23所示,保管部1512可放置多个检验体采集容器1007a。保管部1512例如能保管2小时可进行处理(前处理及测量)的个数(例如数百个)的检验体采集容器1007a。保管部1512形成有用于在直立的状态下插入检验体采集容器1007a的多个保持孔。
[0230]
废弃部1513在俯视观察下,在保管部1512内设置有多个(6个)。废弃部1513中废弃保管了规定时间后的检验体采集容器1007a。废弃部1513在架台下具有可容纳规定时间分钟(例如时间8分钟)的检验体采集容器1007a的容纳部。
[0231]
检验体放置部1514放置有从第一单元1001(参照图21)送出的检验体采集容器1007a。被放置在检验体放置部1514的检验体采集容器1007a被移交给检验体分装部1520,并在检验体被分装后,再次放回至检验体放置部1514。被放回至检验体放置部1514的检验体被分装后的检验体采集容器1007a,被移动至保管部1512。此外,因无法读取检验体采集容器1007a的标识等而需要操作者确认的检验体采集容器1007a,通过射出部而从检验体放置部1514被驱除至外部。
[0232]
qc保管部1515保管有用于品质管理的阳性对照品(positive control)以及阴性对照品(negative controls)的试剂。qc保管部1515所保管的阳性对照品以及阴性对照品的试剂每隔规定次数的检验体(例如几十次毎)就分装并送去测量。
[0233]
检验体分装部1520将检验体从检验体采集容器1007a分装到板1007b。具体地,检验体分装部1520对检验体采集容器1007a进行开箱,并将检验体的一部分从开箱了的检验体采集容器1007a分装到板1007b,并且对分装后的检验体采集容器1007a进行闭箱。
[0234]
(检验体分装部的结构)
[0235]
检验体分装部1520包括开箱机器人1521、分装机器人1522、工作台1523、开箱握持部1524、溶解吸附液分装装置1525和废弃部1526。
[0236]
开箱机器人1521如图22所示,包括机器人本体1521a、和安装在机器人本体1521a的前端的手1521b。机器人本体1521a为包括多个垂直关节的垂直多关节机器人。手1521b如图25所示,具有夹头15211。夹头15211具有3个爪,通过开闭3个爪来握持检验体采集容器1007a的盖1071。
[0237]
如图26所示,开箱握持部1524以不旋转的方式对被放置的检验体采集容器1007a进行握持。此外,开箱握持部1524上设置有读取检验体采集容器1007a的标识的读码(reader)。此外,开箱握持部1524上设置有对盖1071的开箱以及闭箱的状态进行检测的检测传感器。检测传感器例如包括内置照相机的激光传感器。
[0238]
开箱机器人1521进行分装检验体的检验体采集容器1007a的开箱。具体地,开箱机器人1521接收被放置在检验体保管部1510的检验体放置部1514的检验体采集容器1007a,并移动至开箱握持部1524。而且,开箱机器人1521握持着在被开箱握持部1524握持的状态下的检验体采集容器1007a的盖1071(参照图11)并向开箱方向进行旋转,由此来将检验体采集容器1007a开箱。此外,如图26所示,开箱机器人1521在检验体分装后的检验体采集容器1007a被开箱握持部1524握持的状态下,用夹头15211握持检验体采集容器1007a的盖1071向闭箱方向进行旋转,由此来将检验体采集容器1007a闭箱。而且,开箱机器人1521使闭箱后的检验体采集容器1007a移动至检验体保管部1510的检验体放置部1514。此外,开箱机器人1521与检验体采集容器1007a同样地接收用于品质管理的阳性对照品以及阴性对照品的容器,并进行开箱以及闭箱。
[0239]
如图22及图23所示,分装机器人1522将检验体从检验体采集容器1007a分装到板1007b。具体地,分装机器人1522从被开箱了的检验体采集容器1007a抽吸检验体并将抽吸的检验体吐出至板1007b的规定的位置。此外,分装机器人1522与检验体采集容器1007a同样地将试剂从用于品质管理的阳性对照品以及阴性对照品的容器分装到板1007b。
[0240]
分装机器人1522如图22所示,包括机器人本体1522a、和安装在机器人本体1522a的前端的手1522b。机器人本体1522a为包括多个垂直关节的垂直多关节机器人。手1522b如图27所示,包括本体部15221和喷嘴15222。在喷嘴15222的前端可拆装地安装有一次性的吸头15223。本体部15221对喷嘴15222,供给进行检验体的抽吸及吐出的负压以及正压。此外,本体部15221通过检测喷嘴15222内的压力来检测容器内的液面。而且,基于液面的检测结果、和通过分装机器人1522而下降了的吸头15223的前端位置,来获取容器内的水位(检验体的量或试剂的量)。此外,分装机器人1522每当分装检验体时从工作台1523取用新的吸头15223,在检验体分装后,将使用完的吸头15223废弃于废弃部1526。
[0241]
如图22及图23所示,在工作台1523上放置分装有试剂以及检验体的板1007b。此外,工作台1523上放置有容纳被安装在分装机器人1522的手1522b的前端的多个吸头15223的吸头架。
[0242]
如图22所示,溶解吸附液分装装置1525将溶解吸附液分装到板1007b。具体地,溶解吸附液分装装置1525被设置在工作台1523上。此外,溶解吸附液分装装置1525对被工件搬运部1530的搬运机器人1531握持的状态下的板1007b来分装溶解吸附液。此外,溶解吸附液分装装置1525包括多个(4个)喷嘴1525a,并且可对板1007b的4个孔1073(参照图16)并行分装溶解吸附液。此外,溶解吸附液分装装置1525通过搬运机器人1531使板1007b移动,并且通过2次动作,相对于一个板1007b,将溶解吸附液分装在8个孔1073。此外,溶解吸附液分装装置1525中4个喷嘴1525a各自设置有流量传感器,并且通过切换4个端口来进行分装的分装泵,对溶解吸附液进行分装。
[0243]
废弃部1526废弃有用于检验体分装的使用完成的吸头15223。废弃部1526在上表面具有小的废弃口1526a,并且从废弃口1526a放入吸头15223。废弃部1526中配置有在废弃口1526a的下方容纳吸头15223的医疗用桶(medical pail)(容纳具有感染可能性的废弃物的带盖的容器)。
[0244]
(工件搬运部的结构)
[0245]
工件搬运部1530在开箱分装单元1500内搬运工件。具体地,工件搬运部1530搬运
分装有检验体的板1007b。此外,工件搬运部1530搬运容纳检验体分装部1520所使用的吸头15223(参照图27)的吸头架。此外,工件搬运部1530对容纳试剂分装部1540所使用的吸头15413(参照图29)的吸头架进行搬运。
[0246]
如图22及图23所示,工件搬运部1530包括搬运机器人1531、棚1532、棚1533、多个(2个)板搬运部1534、板传递部1535。
[0247]
搬运机器人1531握持并搬运板1007b。具体地,搬运机器人1531从板搬运部1534接收板1007b并搬运至工作台1523。此外,搬运机器人1531在溶解吸附液分装装置1525分装溶解吸附液时,握持并移动板1007b。此外,搬运机器人1531将分装有溶解吸附液的板1007b搬运至工作台1523的分装检验体的位置。此外,搬运机器人1531将分装有检验体的板1007b搬运至试剂分装部1540的工作台1542。此外,搬运机器人1531将工作台1542上分装有试剂的板1007b搬运至板传递部1535。
[0248]
此外,搬运机器人1531从棚1532取出容纳检验体分装部1520所使用的吸头15223(参照图27)的吸头架,并搬运至工作台1523。此外,搬运机器人1531将容纳试剂分装部1540所使用的吸头15413(参照图29)的吸头架搬运至试剂分装部1540的工作台1542。此外,搬运机器人1531将吸头架的中盖搬运并废弃到盖废弃部1543。
[0249]
搬运机器人1531包括机器人本体1531a、和被安装在机器人本体1531a的前端的手1531b。机器人本体1531a为包括多个垂直关节的垂直多关节机器人。手1531b如图28所示,具有一对夹头爪15311。一对夹头爪15311通过开闭来握持板1007b或吸头架。
[0250]
如图22及图23所示,棚1532中保管有容纳检验体分装部1520所使用的吸头15223(参照图27)的吸头架。此外,棚1532中保管有试剂分装部1540所使用的试剂(磁性粒子、prok试剂)。棚1532中设置有抽屉,并且所保管的吸头架以及试剂在抽屉被抽出的状态下被搬运机器人1531取出。此外,棚1532可由操作者从外部供给吸头架以及试剂。
[0251]
棚1533中保管有容纳试剂分装部1540所使用的吸头15413(参照图29)的吸头架。棚1533中设置有抽屉,所保管的吸头架在抽屉被抽出的状态下被搬运机器人1531取出。此外,棚1533可由操作者从外部供给吸头架。
[0252]
板搬运部1534对使用前的新的板1007b进行搬运。板搬运部1534被平行地设置2个。2个板搬运部1534分别具有搬运板1007b的传送带。
[0253]
板传递部1535是为了将分装有检验体以及试剂的板1007b移交给进行核酸提取处理的下游的单元而设置的。
[0254]
(试剂分装部的结构)
[0255]
试剂分装部1540将试剂分装至板1007b。具体地,试剂分装部1540将磁性粒子以及prok试剂分装至分装有检验体的板1007b。
[0256]
试剂分装部1540包括分装机器人1541、工作台1542、和盖废弃部1543。
[0257]
分装机器人1541将放置在工作台1542的搅拌机1542a中的板1007b所容纳的磁性粒子分装至分装有检验体的板1007b。具体地,分装机器人1541抽吸由搅拌机1542a搅拌好的磁性粒子,并将抽吸出的磁性粒子吐出至板1007b的规定位置。此外,分装机器人1541将放置在工作台1542的冷却器1542b中的板1007b所容纳的prok试剂分装至分装有检验体的板1007b。具体地,分装机器人1541抽吸被冷却器1542b冷却好的prok试剂,并将抽吸出的prok试剂吐出至板1007b的规定位置。
[0258]
分装机器人1541包括机器人本体1541a、和安装在机器人本体1541a的前端的手1541b。机器人本体1541a为包括多个垂直关节的垂直多关节机器人。手1541b如图29所示,包括本体部15411和多个(4个)喷嘴15412。在多个喷嘴15412各自的前端可拆装地安装有一次性吸头15413。本体部15411相对于多个喷嘴15412,供给进行检验体的抽吸以及吐出的负压以及正压。此外,分装机器人1541相对于一个板1007b,将磁性粒子以及prok试剂的两方分装至分装有检验体的8个孔1073的每一个。即,分装机器人1541通过4个喷嘴15412将磁性粒子以及prok试剂中的一个分装至4个孔1073,然后,通过4个喷嘴15412将磁性粒子以及prok试剂中的一个分装至剩余的4个孔1073。而且,分装机器人1541将使用了的吸头15413更换成新的吸头15413。然后,分装机器人1541通过4个喷嘴15412将磁性粒子以及prok试剂中的另一个分装至4个孔1073,然后,通过4个喷嘴15412将磁性粒子以及prok试剂中的另一个分装至剩余的4个孔1073。即,分装机器人1541相对于一个板1007b的8个孔1073进行合计4次分装动作,从而对磁性粒子以及prok试剂进行分装。
[0259]
如图23所示,在工作台1542上设置有搅拌机1542a、冷却器1542b、废弃部1542c、板放置部1542d、待机部1542e。
[0260]
搅拌机1542a中放置有容纳了磁性粒子的板1007b,并且使板1007b振动以扩散磁性粒子。
[0261]
冷却器1542b中放置有容纳了prok试剂的板1007b,并且将prok试剂冷却至4℃左右。
[0262]
废弃部1542c被设置在工作台1542的下方,其中废弃有通过分装机器人1541而被用于试剂分装的吸头15413。
[0263]
板放置部1542d上放置有分装检验体的板1007b,并且通过分装机器人1541对放置的板1007b分装试剂(磁性粒子以及prok试剂)。
[0264]
待机部1542e为了灭活待机而放置有分装了检验体的板1007b。
[0265]
盖废弃部1543中废弃有吸头架的中盖。
[0266]
(第三单元的结构)
[0267]
第三单元1003如图21所示,包括制备用于进行检验体测量的试剂的试剂制备室1031、和对检验体进行测量的测量室1032。此外,第三单元1003设置有对多支装管1007c进行搬运的第四机器人1004g。第四机器人1004g中如图30所示,设置有握持多支装管1007c的手1550。
[0268]
手1550具有一对夹头爪1551。一对夹头爪1551各自设置有以夹着多支装管1007c的多个(8个)装管1074的方式进行握持的多个(8个)握持部1552。此外,8个握持部1552之中5个握持部1552上设置有抵接部1553。抵接部1553抑制装管1074的盖1075关闭时装管1074倾倒。
[0269]
多个握持部1552在俯视观察下分别被形成为凹形状。此外,握持部1552被施行防滑加工。例如,握持部1552被施行斜纹滚花加工、或者、丁基橡胶的烧上彩花加工。
[0270]
抵接部1553如图31所示,至少被设置在盖闭合部1037与盖1075抵接的一侧的握持部1552的下方。抵接部1553在盖1075被盖闭合部1037相对按压的情况下,与装管1074抵接。由此,能够抑制装管1074倾倒,因此能够可靠地将盖1075闭合。
[0271]
(其他的实施方式)
[0272]
对本公开申请的第一~第四实施方式的示例进行说明,但本公开申请并不局限于上述第一~第四实施方式以及变形例。即、可在本公开申请的范围内进行各种变形以及改良。例如,在实施方式以及变形例中施行各种变形后的示例、以及、将不同的实施方式以及变形例中的结构要素组合而构建的方式也被包含在本公开申请的范围内。
[0273]
例如,在第一实施方式以及变形例中,检査设备系统中各单元部分被装载在移动体20上,但并不局限于此。检査设备系统的各单元部分也可以在未装载在移动体20的状态下配置于目标场所。在该情况下,检査设备系统的各单元部分可通过机械的方式移设,所搬运的各单元部分可通过机械的方式配置在目标场所。检査设备系统的各单元部分可现场组装,也可在目标场所组装。在该情况下,检査设备系统的各单元部分可以不被容纳在箱体10内,而是在目标场所由组装的墙壁以及天花板等包围而与外部隔离,也可以利用目标场所的现有的墙壁以及天花板等来与外部隔离。
[0274]
第一实施方式以及变形例中,检査设备系统的全部单元部分被一体化,作为单一的单元,被容纳在箱体10内,但并不局限于此。单元部分的一部分或全部也可分离。例如,单元部分的至少一个可形成一个单元,并且该一个单元可容纳在一个箱体内。而且,第一分析室r3以及第二分析室r4等房间也可分离。例如,一个房间可容纳在一个箱体内。这样的检査设备系统可具备多个箱体。多个箱体可互相远离地配置,也可互相连结。另外,单元部分的至少一个形成的一个单元以及一个房间可在配置场所组装。在该情况下,一个单元以及一个房间可在配置场所由组装的墙壁以及天花板等包围而与外部隔离,也可利用配置场所的现有的墙壁以及天花板等来与外部隔离。
[0275]
第一实施方式以及变形例中,作为箱体10而例示有集装箱,但箱体10的结构并不局限于此。箱体10的结构是将内部空间与外部空间阻断的结构即可。例如,箱体10可以是预先组装成箱状或者在移动体20等之上组装的单元房屋等。
[0276]
第一实施方式以及变形例中,采集室r2、第一分析室r3以及第二分析室r4中的处理由机器人110~130来进行,但并不局限于此。3个房间之中的至少一个房间中的处理可由医疗从业者来进行。
[0277]
第一实施方式以及变形例中,配置在采集室r2、第一分析室r3以及第二分析室r4中的机器人110~130为同一型号的机器人,但并不局限于此,也可以是不同型号的机器人。所配置的机器人可以是适合在各房间中的处理的机器人。
[0278]
第一实施方式以及变形例中,检査设备系统具备第一单元部分u1~第四单元部分u4,但并不局限于此。检査设备系统可具备更多单元部分,也可不具备第一单元部分u1~第四单元部分u4的至少一个。例如,检査设备系统可不具备包括诊疗室r1的第四单元部分u4。例如,在检査设备系统被配置在室外的情况下,检査设备系统可相对于在箱体10外部的被检者p采集检验体。
[0279]
第一实施方式以及变形例中,检査设备系统被配置在跨越地理的边界的移动的起点以及终点中的至少一方,但并不局限于此。例如,检査设备系统可配置在人员高度集中的场所、或者、携带病原体的可能性高的人员聚集的场所。例如,检査设备系统可配置在医院、保健所、pcr检査设施、住宿设施、携带病原体的人员的隔离设施、大型建筑、体育场馆以及大厅。在该情况下,检査设备系统的各单元部分可在容纳于箱体的状态下配置,也可利用配置场所的房间等设施来配置。
[0280]
此外,本公开申请的技术的各方式例可列举出如下示例。本公开申请的一方式所涉及的检査设备系统为用于进行来自被检者的检验体的采集以及分析的检査设备系统,包括形成具备用于采集检验体的设备的采集室的第一单元部分、和以与采集室隔离的方式形成具备用于分析检验体的设备的分析室的第二单元部分,和具备输出分析结果的设备的第三单元部分,检査设备系统可配置在跨越地理的边界的移动的起点以及终点中的至少一方。
[0281]
根据上述方式,检査设备系统具备:用于采集检验体的第一单元部分、用于分析检验体的第二单元部分、和用于输出分析结果的第三单元部分。检査设备系统可在配置有检査设备系统的场所中进行检验体的采集、分析以及分析结果的输出的一系列处理。第一单元部分形成采集室,第二单元部分形成分析室。具备这样的第一单元部分以及第二单元部分的检査设备系统的配置在不具备检査设备的场所中也可以简化。检査设备系统可在不具备检査设备的场所简易地构建出可检査的环境。
[0282]
本公开申请的一方式所涉及的检査设备系统中,第一单元部分可具备使采集室成为负压环境的第一空调系统。
[0283]
根据上述方式,第一空调系统抑制检验体以及被检者的飞沫中所含有的病原体等向采集室的外部扩散,从而能够提供适合采集室的空调环境。由于第一单元部分具备第一空调系统,因此第一空调系统的配置简单。
[0284]
本公开申请的一方式所涉及的检査设备系统中,第二单元部分可具备使分析室成为正压环境或负压环境的第二空调系统。
[0285]
根据上述方式,第二空调系统能够提供适合分析室的空调环境。由于第二单元部分具备第二空调系统,因此第二空调系统的配置简单。
[0286]
本公开申请的一方式所涉及的检査设备系统还可具备以与分析室隔离的方式形成被检者接受用于采集检验体的诊疗的诊疗室的第四单元部分。
[0287]
根据上述方式,检査设备系统不需要另行准备诊疗室。检査设备系统可在配置有检査设备系统的场所进行诊疗、检验体的采集以及检验体的分析的一系列处理。
[0288]
本公开申请的一方式所涉及的检査设备系统中,第三单元部分可以与采集室隔离的方式形成容纳医疗从业者的容纳室。
[0289]
根据上述方式,检査设备系统不需要另行准备容纳医疗从业者的容纳室。检査设备系统可在配置有检査设备系统的场所履行医疗从业者的职务。例如,上述职务可包括分析结果的评价、以及、分析结果的凭证的发行等职务。此外,由于容纳室与采集室隔离开,因此可防止医疗从业者污染病原体。
[0290]
本公开申请的一方式所涉及的检査设备系统中,第一单元部分以及第二单元部分的至少一个可具备能执行用于采集检验体的行为以及用于分析检验体的行为中的至少一个的机器人。而且,第一单元部分可具备能执行用于采集检验体的行为的机器人。
[0291]
根据上述方式,可实现由检验体的采集和/或检验体的分析的机器人的替代。由此,可实现从业于检验体的采集以及检验体的分析的医疗从业者的降低。通过使用了机器人的自动化,从而可执行连续的处理而无关乎时间。而且,由检验体的采集的机器人实现的替代能够降低医疗从业者被病原体污染的危险性。
[0292]
本公开申请的一方式所涉及的检査设备系统可还具备被配置在由第三单元部分
形成的容纳室且对机器人进行操作的操作装置,其中,容纳室以与采集室隔离的方式形成,并容纳医疗从业者。
[0293]
根据上述方式,医疗从业者能够在与采集室隔离的容纳室中使用操作装置来对机器人进行操作。由此,能够降低医疗从业者与病原体接触。
[0294]
本公开申请的一方式所涉及的检査设备系统可还具备操作装置,该操作装置被配置在远离具备机器人的所有单元部分的远程位置且经由通信手段对机器人进行远程操作。
[0295]
根据上述方式,医疗从业者能够在远离具备机器人的所有单元部分的远程位置,使用操作装置对机器人进行远程操作。例如,即使医疗从业者不在配置有检査设备系统的场所的情况下,仍可进行检査设备系统的处理。例如,医疗从业者也可以针对配置在互相远离的多个场所的多个检査设备系统远程操作机器人。由此,少数医疗从业者便可实现检査设备系统的运用。
[0296]
本公开申请的一方式所涉及的检査设备系统中,单元部分的至少一个可形成能与其他的单元部分分离的独立单元。
[0297]
根据上述方式,可实现单元部分的摆放的变更。例如,可实现与配置有检査设备系统的场所的环境相适的单元部分的配置。
[0298]
本公开申请的一方式所涉及的检査设备系统中,单元部分可作为整体被一体化,从而形成一个单元。
[0299]
根据上述方式,检査设备系统所具备的所有单元部分都可以一起处理。检査设备系统所具备的所有单元部分被一体化,因此可实现检査设备系统的紧凑化和检査设备系统的结构的简化。
[0300]
本公开申请的一方式所涉及的检査设备系统中,一个单元可具备容纳单元部分的整体的一个箱体。
[0301]
根据上述方式,检査设备系统所具备的所有单元部分汇集于一个箱体内。由此,检査设备系统的配置以及除去变得简单。
[0302]
本公开申请的一方式所涉及的检査设备系统中,形成单元部分的单元可由机械的方式移设。
[0303]
根据上述方式,单元的配置以及除去变得简单。
[0304]
本公开申请的一方式所涉及的检査设备系统中,形成单元部分的单元可装载在移动体上。
[0305]
根据上述方式,可实现使用了移动体的单元的移动。由此,在各种场所的单元的配置可以变得容易。
[0306]
本公开申请的一方式所涉及的检査设备系统中,形成单元部分的单元可以是在配置场所组装的组装式单元。
[0307]
根据上述方式,可实现与配置有检査设备系统的场所的环境相适的单元的配置。例如,即使在组装完成的单元无法搬入到配置场所的情况下,仍可实现单元的配置。
[0308]
本公开申请的一方式所涉及的检査设备系统中,第二单元部分可包括:以与采集室隔离的方式形成具备用于对检验体进行第一分析的设备的第一分析室的第一分析单元部分、和以与采集室以及第一分析室隔离的方式形成具备用于对检验体进行第二分析的设备的第二分析室的第二分析单元部分,第一分析单元部分具备使第一分析室成为正压环境
以及负压环境之一的环境的空调系统,以作为第二空调系统,第二分析单元部分具备使第二分析室成为正压环境以及负压环境中的另一环境的空调系统,以作为第二空调系统。
[0309]
根据上述方式,检査设备系统可具备空调环境不同的多个分析室。由此,检査设备系统可应对各种检验体的分析。
[0310]
本公开申请的一方式所涉及的检査设备系统可配置在机场的航站楼。
[0311]
根据上述方式,检査设备系统可针对搭乘航空器要从机场出发的乘客进行出发前的检査的实施以及结果的输出,并且可针对搭乘航空器到达机场的乘客进行从机场前往外部之前的检査的实施以及结果的输出。检査结果成为乘客有无污染的证明。由此,可抑制被病原体污染的人员扩散到其他国家等其他的地域。而且,也可抑制未被污染的人员无法利用航空器去往其他的地域。
[0312]
本公开申请的一方式所涉及的检査设备系统中,检验体是接受pcr(polymerase chain reaction,聚合酶链式反应)检査的检验体,分析可以是用于pcr检査的分析。
[0313]
根据上述方式,检査设备系统能在不具备pcr检査的检査设备的场所构建可检查pcr的环境。
[0314]
此外,上述中使用的序数、数量等的数字全部是为了具体说明本公开申请的技术而例示,本公开申请并不局限于所例示的数字。此外,结构要素间的连接关系是为了具体说明本公开申请的技术而例示的,实现本公开申请的功能的连接关系并不局限于此。
[0315]
符号说明
[0316]
1、1a、1b检査设备系统;
[0317]
10箱体;
[0318]
20移动体;
[0319]
110、120、130机器人;
[0320]
310第一操作输入输出装置(操作装置);
[0321]
320第二操作输入输出装置(操作装置);
[0322]
600结果输出装置;
[0323]
ab航站楼;
[0324]
ac1第一空调系统;
[0325]
ac2a、ac2b、ac2c、ac2d第二空调系统;
[0326]
ac3第三空调系统;
[0327]
ap机场;
[0328]
h1、h2医疗从业者;
[0329]
p被检者;
[0330]
r1诊疗室;
[0331]
r2采集室;
[0332]
r3第一分析室(第一测量室);
[0333]
r4第二分析室(第二测量室);
[0334]
r5容纳室;
[0335]
r6、r6a、r6b操作室;
[0336]
u1第一单元部分;
[0337]
u2第二单元部分;
[0338]
u3第三单元部分;
[0339]
u4第四单元部分;
[0340]
u5第五单元部分。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1