手持式机电助行器的制作方法
本发明总体上涉及助行器,并且更具体地涉及可操作地配置成辅助使用者在周围环境中以步行或其他方式四处移动(这对于视力受损或残疾使用者特别有益)的机电助行器。
背景技术:
1、导航周围环境(即,人的直接周围环境)在人不熟悉周围环境的情况下和/或由于健康、医疗、环境或其他原因而不能有效、准确或及时地感知可能阻挡或阻碍人的路径的显著对象或障碍物的情况下显著更艰巨且耗时。特别是对于视力障碍或残疾使用者,在没有助行器的帮助下,迅速地感知和检测此类障碍物并且然后相应地调整人的路径可能不那么简单。然而,现有的助行器通常需要使用者连续地从一侧到另一侧摇摆该助行器或拐杖以检测使用者前方大约3英尺到5英尺的对象。这些助行器的特征在于显著的局限性以及使用困难和不便,显著的局限性包括有限的检测装置,即,这些辅助器通常仅检测直接位于使用者前方的对象并且未必检测使用者侧面、上方或后方的对象,使用困难和不便,即,使用者必须连续左右摇摆拐杖以避免障碍物,导致加速手臂疲劳。对象的检测仅在拐杖与外物直接物理接触时发生,特别是在对象是另一人、宠物或动物的情况下,这可能导致对所检测的对象的痛苦或攻击性触摸(诸如当使用者以更高速度摇摆拐杖时)。
2、因此,需要克服如上所述的现有技术的问题。
技术实现思路
1、本发明提供了一种手持式机电助行器,该手持式机电助行器主要被设计用于视力受损者并且克服了迄今已知的这种一般类型的装置和方法的前述缺点,并且有效且高效地警示使用者在使用者周围环境中的对象和障碍物,并且有利地引导使用者沿着远离所检测到的对象或障碍物的路径。
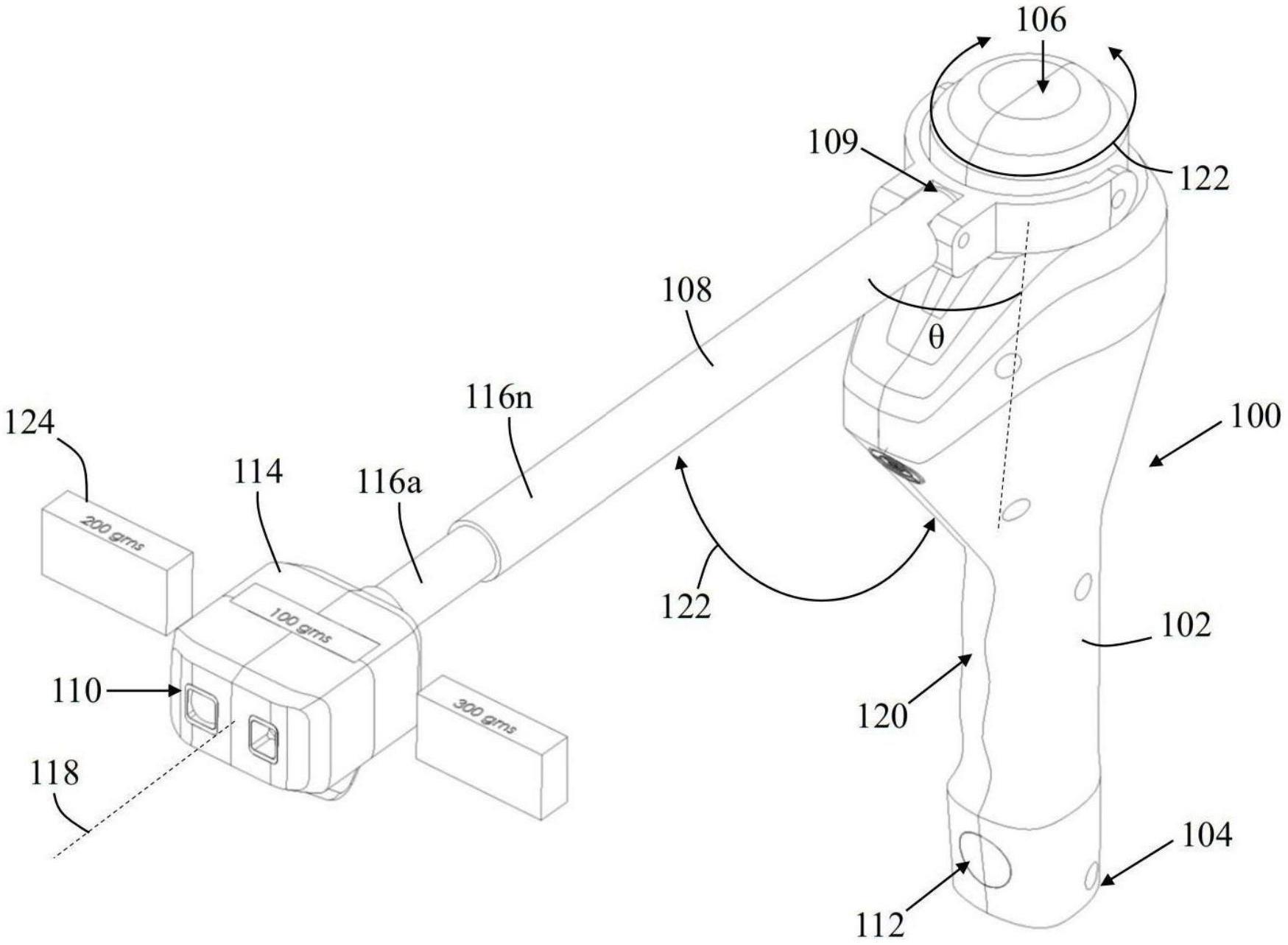
2、鉴于前述和其他目的,根据本发明提供了一种手持式机电助行器,该手持机电助行器包括:手柄构件,该手柄构件用于由使用者抓握并且具有第一端、第二端、将该手柄构件的第一端和第二端间隔开的手柄构件长度、前手柄表面以及与前手柄表面相对的后手柄表面;电子马达组件,电子马达组件具有电耦接到电池电源的至少一个电子马达;悬臂式引导臂构件,悬臂式引导臂构件可操作地连接到至少一个电子马达,悬臂式引导臂构件具有可旋转地耦接到手柄构件的第一端、与该悬臂式引导臂构件的第一端相对的第二自由端、将悬臂式引导臂构件的第一端与第二自由端间隔开的臂长度、臂配重,该臂配重被布置成邻近第二自由端并且具有至少约0.2lbs的集中配重并且可操作地被配置成沿着臂平移路径平移并且具有沿着臂平移路径的操作位置,在该操作位置中,悬臂式引导臂构件的纵向轴线相对于前手柄表面以大体上垂直的角度布置并且与前手柄表面对准;距离传感器和相机中的至少一个,距离传感器和相机中的至少一个各自具有操作表面,操作表面可操作地被配置成当处于所述操作位置时以对准配置面向所述悬臂式引导臂构件的纵向轴线并且可操作地配置成检测从所述第二自由端空间地移位的对象;以及电子控制器,电子控制器电耦接至电池电源并且通信耦接至至少一个电子马达以及距离传感器和相机中的至少一个,电子控制器可操作地被配置成接收从第二自由端空间移位的对象的检测并且引起悬臂式引导臂构件在远离所检测到的对象的方向上选择性地旋转以沿着臂平移路径相对于操作位置产生偏离角度θ,由此通过由手臂配重产生的扭矩引起使用者握持手柄构件的动力并且引导使用者往哪里行走。
3、根据另一特征,操作位置包括相对于前手柄表面以垂直的角度布置的悬臂式引导臂构件。
4、根据本发明的另一个特征,本发明的一个实施例包括沿着臂长度布置的臂头部壳体,并且具有臂配重和容纳在其中的距离传感器和相机中的至少一者。
5、根据又另一个特征,头部壳体限定悬臂式引导臂构件的第二自由端。
6、根据另外的特征,臂头部壳体进一步包括激光引导距离传感器和超声距离传感器,该激光引导距离传感器和超声距离传感器通信地耦接到电子控制器并且可操作地被配置成检测从第二自由端空间地移位的对象。
7、根据优选实施例的另一特征,本发明还包括陀螺仪,该陀螺仪被容纳在手柄构件内、通信地耦接到电子控制器并且可操作地被配置成检测前手柄表面的基本方向取向,电子控制器可操作地被配置成在检测偏离角度θ之后引起悬臂式引导臂构件选择性地旋转至与前手柄表面的基本方向取向对准的操作位置。
8、根据又另一特征,手持式机电助行器还包括存储器存储单元,存储器存储单元容纳在手持式机电助行器上并且存储多个数字地理位置,每个数字地理位置具有多个gps边界坐标;以及至少一个按钮,至少一个按钮可操作地被配置成电子地访问用于多个数字地理位置的多个gps边界坐标。
9、根据进一步的特征,电子控制器可操作地被配置成引起悬臂式引导臂构件选择性地旋转至与多个数字地理位置之一和前手柄表面的基本方向取向相对应的期望的偏离角度θ。
10、根据另一特征,悬臂式引导臂构件被可操作地配置成用于当悬臂式引导臂构件在预选数字地理位置的50米之内时以向上的取向旋转。
11、根据又另一特征,多个数字地理位置通过网络通信地耦接至电子控制器。
12、根据本发明的进一步特征,距离传感器和相机中的至少一个各自可操作地被配置成检测从第二自由端空间地移位六英尺或更少的对象。
13、根据又另一特征,悬臂式引导臂构件必须被定向在操作位置中以沿着臂平移路径选择性地旋转或平移。
14、根据另一特征,电子马达组件进一步包括:摇摆马达,摇摆马达可操作地被配置成从固定位置水平地摇摆相机;以及俯仰马达,该俯仰马达可操作地被配置成从固定位置竖直地俯仰相机。
15、根据进一步的特征,悬臂式引导臂构件还包括可伸缩地耦接至彼此并且可操作地被配置成选择性地调整臂长度的多个臂构件。
16、尽管本发明在本文被说明和描述为体现在手持式机电助行器中,但它并不旨在局限于所示出的细节,因为在不脱离本发明的精神的情况下并且在权利要求书的等效物的保护范围和范围内,可以在其中进行各种修改和结构改变。此外,将不详细描述或将省略本发明的示例性实施例的公知元件,以便不模糊本发明的相关细节。
17、在所附权利要求中阐述了被认为是本发明特征的其他特征。如所需要的,本文公开了本发明的详细实施例;然而,应当理解的是,所公开的实施例仅是本发明的示例性的,它们可以以不同的形式来实施。因此,本文公开的特定结构和功能细节不应被解释为限制,而是仅作为权利要求的基础和作为教导本领域普通技术人员以实际上任何适当详细的结构来不同地采用本发明的代表性基础。此外,本文使用的术语和短语不旨在是限制性的,而是旨在提供对本发明的可理解的描述。虽然本说明书以界定本发明的被视为新颖的特征的权利要求结束,但相信通过结合附图考虑以下描述将更好地理解本发明,在附图中相同的附图标记接后。附图中的图不是按比例绘制的。
18、在公开和描述本发明之前,应当理解的是,本文中使用的术语仅用于描述具体实施例的目的,而并非旨在进行限制。如本文所使用的术语“一种(a)”或“一种(an)”被定义为一个或多于一个。如本文所使用的术语“多个”被定义为两个或多于两个。如本文所使用的术语“另一个”被定义为至少第二个或更多个。如在此所使用的术语“包括”和/或“具有”被定义为包括(即,开放式语言)。如本文使用额术语“耦接”被定义为连接,但不一定是直接连接,并且不一定是机械连接。术语“提供”在本文中以其最广泛的意义来定义,例如,一次或在一段时间内以整体或多个部分带来/进入物理存在、使得可用、和/或提供给某人或某物。同样,出于本文的描述的目的,术语“上”、“下”、“左”、“后”、“右”、“前”、“竖直”、“水平”及其派生词涉及如图中所定向的本发明,并且不应被解释为将任何特征限制为具体定向,因为所述定向可以基于使用者的装置视角而改变。此外,不旨在受前述技术领域、背景技术、
技术实现要素:
或以下具体实施方式中呈现的任何明示或暗示的理论的限制。
19、如本文使用的,术语“约(about)”或“大约(approximately)”适用于所有数值,无论是否明确指示。这些术语通常指本领域技术人员将认为等同于所列举的值(即,具有相同的功能或结果)的数字范围。在许多情况下,这些术语可包括四舍五入至最接近的有效数字的数字。在本文件中,术语“纵向”应被理解为意指在对应于手持式机电助行器的长形方向的方向上。如本文所使用的术语“程序”、“软件应用程序”等被定义为设计用于在计算机系统上执行的指令序列。“程序”、“计算机程序”或“软件应用程序”可以包括子程序、函数、过程、对象方法、对象实现方式、可执行应用程序、小应用程序、小服务程序、源代码、目标代码、共享库/动态加载库和/或被设计用于在计算机系统上执行的其他指令序列。
- 还没有人留言评论。精彩留言会获得点赞!