基于大地坐标系的医学影像学坐标校正系统及校正方法与流程
1.本发明涉及医学影像学坐标系校正领域,尤其是涉及一种基于大地坐标系的医学影像学坐标校正系统及校正方法。
背景技术:
2.在医院进行ct或磁共振(mri)等检查时,为了观察方便,医生会将虚拟组织模型利用3d打印制作成实体模型用于观测一些重要的区域或直观的确定手术介入角度。
3.由于患者的体位是随机的,虽然针对于不同病情,会有一些经验推荐体位,但因人而异会存在一定偏差。另外,扫描得来的保存于机器数据中,难以直接直观的转化为所需的空间数据,需要掌握一定的影像学软件或需要影像科医生配合才能完成。当应用于后期处理,如3d打印时,其相对空间位置可能丢失,或者难以直观表现。
4.由于中间过程繁琐,增加了判断病情的时间,另外也提升了临床医生的上手难度。
5.因此,需要一种能够将患者体位和组织模型角度对应的装置,该装置能够以ct或mri为中间桥梁,将患者体位和机器关联,将组织模型角度记录后反馈给机器。由于处于实际空间中的3d打印组织模型倾角比较好测量,但难以直接与ct或mri的虚拟模型坐标系对齐,需要先将ct或mri相对于大地调整水平,然后把测量的倾角输入机器,这样虚拟模型和实体组织模型才能对应。
6.但是ct或mri使用时不可能每次都去检查校正水平,将ct或mri角度代入c臂机后无疑又增加了中间过程的繁琐度,因此亟需一种ct坐标校正系统及校正方法能够将ct虚拟模型和实体组织模型坐标系对齐,并且能够方便将实体模型角度值量化,指导后续的ct检查。
技术实现要素:
7.本发明提供了一种基于大地坐标系的医学影像学坐标校正系统及校正方法,解决了影像学虚拟模型转化为实体模型时,坐标系不好对应以及实体模型角度值难以量化反馈的问题。
8.为解决上述技术问题,本发明所采用的技术方案是:一种基于大地坐标系的医学影像学坐标校正系统,包括固定盒,还设有可摆动的坐标系管,坐标系管与固定盒连接,坐标系管内设有造影剂;固定盒上还设有可转动的标定板,标定板上设有十字刻线,坐标系管与标定板连接;还设有可转动的展板架,展板架用于固定组织模型,展板架上设有倾角传感器。
9.优选的方案中,还包括蒙版,蒙版一侧用于连接人体,蒙版另一侧与固定盒可拆卸连接。
10.优选的方案中,固定盒为箱体结构,坐标系管设在固定盒内,标定板设在固定盒上端,还设有万向节,万向节下端连接坐标系管,标定板设有转动中轴,转动中轴穿过固定盒
以与万向节上端连接。
11.优选的方案中,坐标系管包括五通管套、第一空心管、第二空心管和第三空心管,五通管套设有多个开口,各开口设有切槽和抱夹,第一空心管、第二空心管和第三空心管分别与五通管套的各开口套接以组成三轴正交结构,第一空心管、第二空心管和第三空心管中填充造影剂。
12.优选的方案中,万向节包括上u型块和下u型块,上u型块和下u型块之间设有中心衔接块,中心衔接块设有多个衔接转轴,各衔接转轴与中心衔接块转动连接,各衔接转轴组成十字结构,各衔接转轴分别与上u型块和下u型块连接。
13.优选的方案中,中心衔接块中还设有涨紧器,涨紧器内设有可滑动的滑动轴,涨紧器侧壁沿周向设有多个开孔,开孔处设有顶珠,顶珠用于顶住衔接转轴的端面,滑动轴设有锥形面,滑动轴滑动以使锥形面顶紧或松开顶珠。
14.优选的方案中,还设有支撑架装置,展板架一侧设有转动关节组,转动关节组一端与支撑架装置转动连接,转动关节组的转动轴和转动关节组与支撑架装置的转动轴轴线垂直布置。
15.包括校正方法,将带有坐标系管的固定盒与人体固定;坐标系管和人体一起进行ct或mri扫描;利用ct或mri扫描的来的数据进行3d打印,将组织模型和坐标系打印一体;将组织模型放置在展板架上,调整展板架的角度,寻找需要重点观察的区域,记录此时展板架的角度值;将角度值反馈给c臂机设备,人体躺至该角度进行重点区域扫描。
16.包括补充方法,制作人体表面仿形蒙版;首次ct或mri扫描时,将固定盒与蒙版连接,蒙版与人体通过粘胶层或绑带固定;扫描结束后,将蒙版与固定盒分离;重点观察的区域角度确定后需要进行c臂机扫描时,再次将蒙版与固定盒安装,利用蒙版将固定盒固定在人体上。
17.优选的方案中,包括蒙版制作方法:人体平躺,将遮光膜覆盖在人体表层上;将紫外胶注入透明密封袋内,并将充满紫外胶的透明密封袋平铺在遮光膜上;利用紫外灯照射透明密封袋使得紫外胶凝固;取下凝固的透明密封袋将上端面打磨平整,制作成蒙版。
18.本发明的有益效果为:利用重力定义竖直方向,直接与人体连接,不受ct或mri设备摆放姿态的影响;便于与人体组织模型一起3d打印,实体模型与虚拟模型形成坐标系对应,并设有万向转动的展板架,便于确认最佳手术角度并将角度值与机器定位坐标系建立直观联系,可减少后续治疗中dsa等造影次数,造影剂使用量等,降低医疗成本,提高医疗安全性;制作简单、显示明确、成本低,以图像等方式存在,因此稳定,不易修改,有效及持续性强,防止出现软件迁移或后续进行其他应用时,图像的空间定位信息的丢失。
附图说明
19.下面结合附图和实施例对本发明作进一步说明。
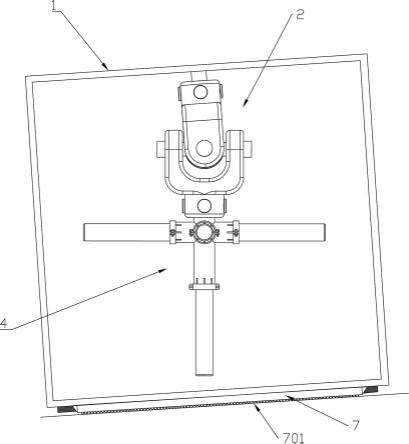
20.图1是本发明的坐标系管外置示意图。
21.图2是本发明的坐标系管示意图。
22.图3是本发明的标定板示意图。
23.图4是本发明的固定盒具体实施示意图。
24.图5是本发明的固定盒俯视图。
25.图6是本发明的固定盒局部示意图。
26.图7是本发明的坐标系管结构图。
27.图8是本发明的万向节结构图。
28.图9是本发明的中心衔接块示意图。
29.图10是本发明的涨紧器剖视图一。
30.图11是本发明的涨紧器剖视图二。
31.图12是本发明的展板架侧视图。
32.图13是本发明的展板斜视图。
33.图14是本发明的展板架脚架示意图。
34.图15是本发明的展板架脚架局部图。
35.图16是本发明的蒙版制作图。
36.图17是本发明的胸骨蒙版3d模型图。
37.图中:固定盒1;摆动器2;重锤201;中空套管202;球铰座203;展板架3;支撑柱301;后固定板302;倾角传感器303;俯仰转动头304;水平转套305;脚架306;地脚307;调整杆308;衬套309;第一锁定旋钮310;第二锁定旋钮311;第一顶块312;第二顶块313;滑槽314;转动关节组315;自转轴316;坐标系管4;万向节401;五通管套402;第一空心管403;第二空心管404;第三空心管405;切槽406;抱夹407;上u型块408;下u型块409;中心衔接块410;衔接转轴411;涨紧器412;滑动轴413;顶珠414;电磁铁415;锥形面416;标定板5;转动中轴501;十字刻线6;阻尼片502;蒙版7;粘胶层701;遮光膜702;人体表层703;透明密封袋704;紫外胶705;单向阀706。
具体实施方式
38.实施例1:如图4-16中,一种基于大地坐标系的医学影像学坐标校正系统,包括固定盒1,还设有可摆动的坐标系管4,坐标系管4与固定盒1连接,坐标系管4内设有造影剂;固定盒1上还设有可转动的标定板5,标定板5上设有十字刻线6,坐标系管4与标定板5连接;还设有可转动的展板架3,展板架3用于固定组织模型,展板架3上设有倾角传感器303。
39.坐标系管4为笛卡尔坐标系状的中空玻璃管,为了ct拍摄后容易区别x、y、z轴,将x、y、z轴长度做成不同,例如将z轴做成只有正半轴或负半轴,x轴和y轴为正、负半轴都有但长度不同。
40.首先需要将固定盒1通过绑带或粘胶与人体固定,待人体平躺于检查床,体位稳定后,待坐标系管稳定不摆动后,坐标系管4的z轴指向地心,固定坐标系管4相对位置及角度。
41.进行影像学检查时,由于人体提前已经注射了造影剂,此时人体和坐标系管4均被同框ct扫描进模型数据中,人体的坐标系可以很直观的观测,将模型数据通过3d打印成实体模型时,坐标轴也同时被打印并与实体组织模型连接一体,也就是说坐标系管所代表得坐标始终不会因为中间环节而丢失。
42.模型打印后放置在展板架3进行后处理,调整模型角度,调整到方便观察重点区域的角度或方便实施介入手术的角度,由于有倾角传感器的存在,可以量化记录该角度,并且,可通过由坐标系管所代表的坐标轴进行校正处理。
43.由于首次拍摄已经知道了ct或mri坐标系与大地坐标系的偏差值,将该角度值代入c臂机设备,指导患者躺至该角度进行重点区域的扫描。
44.优选的方案中,还包括蒙版7,蒙版7一侧用于连接人体,蒙版7另一侧与固定盒1可拆卸连接。
45.优选的方案中,固定盒1为箱体结构,坐标系管4设在固定盒1内,标定板5设在固定盒1上端,还设有万向节401,万向节401下端连接坐标系管4,标定板5设有转动中轴501,转动中轴501穿过固定盒1以与万向节401上端连接。
46.标定板5下侧面设有阻尼片502,适当提高标定板5的转动摩擦力,便于稳定角度。
47.固定盒1水平时,十字刻线6和坐标系管4的x、y轴平行,坐标系管4中轴与标定板5中轴对齐,二者可同轴同步转动。固定盒1倾斜时,坐标系管4的z轴始终指向重心,坐标系管4即代表大地坐标系。
48.十字刻线6可拓展成棋盘线。
49.ct及mri设备集成有激光器,可发射十字交叉的定位光线,该光线即为设备的x、y轴,由于标定板5可旋转,可调整十字刻线6或棋盘线的其中一个横纵组合线对齐十字交叉的定位光线,此时设备坐标系与大地坐标系的xy轴对齐。也就是说ct坐标系与大地坐标系始终只存在绕x轴或y轴或二者的偏转角,不存在绕z轴的水平偏转角,此时xy轴分别对应ct或mri机的头足线及左右线,两者均垂直与重心线,减小了坐标系对应时的数学计算量。
50.优选的方案中,坐标系管4包括五通管套402、第一空心管403、第二空心管404和第三空心管405,五通管套402设有多个开口,各开口设有切槽406和抱夹407,第一空心管403、第二空心管404和第三空心管405分别与五通管套402的各开口套接以组成三轴正交结构,第一空心管403、第二空心管404和第三空心管405中填充造影剂。
51.第一空心管403和第二空心管404各两个,第三空心管405独一个,分别插入对应开口并被抱夹407固定。
52.优选的方案中,万向节401包括上u型块408和下u型块409,上u型块408和下u型块409之间设有中心衔接块410,中心衔接块410设有多个衔接转轴411,各衔接转轴411与中心衔接块410转动连接,各衔接转轴411组成十字结构,各衔接转轴411分别与上u型块408和下u型块409连接。
53.衔接转轴411与u型块的连接端是固定不转动的,与中心衔接块410套接的一端是旋转的。
54.优选的方案中,中心衔接块410中还设有涨紧器412,涨紧器412内设有可滑动的滑
动轴413,涨紧器412侧壁沿周向设有多个开孔,开孔处设有顶珠414,顶珠414用于顶住衔接转轴411的端面,滑动轴413设有锥形面416,滑动轴413滑动以使锥形面416顶紧或松开顶珠414。
55.涨紧器412内上端还设有电磁铁415,线路由上端穿出至外界控制,衔接转轴411端部设置弧形或锥形的定位凹坑,并涂覆摩擦材料,增大与顶珠414接触的摩擦力,患者姿态稳定后,电磁铁415得电吸住滑动轴413,顶珠414被挤出顶在衔接转轴411端部,衔接转轴411转动方向被锁定。
56.由于mri设备禁止使用金属或带磁物体,电磁铁415方案主要针对于ct机扫描。
57.优选的方案中,还设有支撑架装置,展板架3一侧设有转动关节组315,转动关节组315一端与支撑架装置转动连接,转动关节组315的转动轴和转动关节组315与支撑架装置的转动轴轴线垂直布置。
58.展板架3用于固定3d打印组织模型,转动关节组315另一端与展板架3连接,还设有倾角传感器303,倾角传感器303与展板架3连接。
59.将展板架3摆为初始角度,将打印好的组织模型通过轧带或双面胶或自攻螺钉固定在展板架3的面板上;根据实际需求,调整展示板3或组织模型到所需倾角位置,即可通过倾角传感器获取该位置的角度信息。
60.优选的方案中,倾角传感器303为三轴倾角传感器。
61.倾角传感器为标准件,三轴倾角传感器即可实时监测绕笛卡尔坐标系x、y、z三个轴的旋转角,选择双轴或三轴倾角传感器是根据展板架3的转轴数而定的。
62.优选的方案中,展板架3包括多孔板和后固定板302,后固定板302与多孔板之间设有多个支撑柱301,倾角传感器303设在后固定板302中心。
63.多孔板便于绑扎固定或螺丝固定组织模型,支撑柱301架高了多孔板,使得与后固定板302之间存在一定的手动操作空间,方便拧螺丝或绑扎。
64.优选的方案中,转动关节组315包括俯仰转动头304和水平转套305,俯仰转动头304和水平转套305铰接,支撑架装置包括脚架306,脚架306设有多个支腿,支腿下端设有可调整高度的地脚307,脚架306设有可上下滑动的调整杆308,水平转套305内设有陶瓷或铜制作的衬套309,调整杆308上端与水平转套305转动套接,俯仰转动头304上端设有自转轴316,自转轴316与展板架3转动连接。
65.俯仰转动头304设有细颈部,细颈部架高了后固定板302,防止后固定板302转动时撞到水平转套305。
66.优选的方案中,调整杆308设有滑槽314,脚架306设有第二锁定旋钮311,第二锁定旋钮311端部设有第二顶块313,第二顶块313卡在滑槽314中,第二顶块313端部抵靠滑槽314。
67.优选的方案中,水平转套305设有第一锁定旋钮310,第一锁定旋钮310端部设有第一顶块312,第一顶块312一端抵靠在调整杆308侧壁。
68.包括校正方法,将带有坐标系管4的固定盒1与人体固定;坐标系管4和人体一起进行ct或mri扫描;将多个单层切片的ct或mri数据进行叠砌组合重建,将重建的虚拟模型;
利用ct或mri扫描得来的数据进行3d打印,将组织模型和坐标系管所确立的坐标系,或坐标管本身打印一体,形成实体模型;将上述带有坐标系的实体组织模型放置在展板架3上,利用激光水平仪发射的交叉指示线,将实体模型上得坐标轴z轴标定为指向重心;以激光水平仪发射的其中一条水平光线方向为观察方向,定位y轴方向;调整实体模型的坐标轴y轴与观察方向平行,实体模型的朝向即确定;记录下此时倾角传感器303的三轴角度或归零处理;调整展板架3的角度,寻找需要重点观察的区域,进行坐标系校正,即将模型坐标系(z轴为大地垂线方向,xy轴线为ct或mr头足水平线及左右水平线)与测量坐标系轴线进行匹配,并记录此时展板架3的角度变化值;将角度差值反馈给c臂机设备,人体躺至该角度进行重点区域扫描,c臂机各轴的调整值即为该差值。
69.另外,由于c臂机需要定期调整水平,保持与大地坐标系的联系。
70.包括补充方法,制作人体表面仿形蒙版;首次ct或mri扫描时,将固定盒1与蒙版7连接,蒙版7与人体通过粘胶层701或绑带固定;扫描结束后,将蒙版7与固定盒1分离;重点观察的区域角度确定后需要进行c臂机扫描时,再次将蒙版7与固定盒1安装,利用蒙版7将固定盒1固定在人体上。
71.优选的方案中,包括蒙版制作方法:人体平躺,将遮光膜702覆盖在人体表层703上;将紫外胶705注入透明密封袋704内,并将充满紫外胶705的透明密封袋704平铺在遮光膜702上;利用紫外灯照射透明密封袋704使得紫外胶705凝固;取下凝固的透明密封袋704将上端面打磨平整,制作成蒙版7。
72.固定盒1下端可制作卡扣或其他快拆结构,方便快速与蒙版7连接,蒙版7平整的一面贴着固定盒1底面,固定盒1为公用装置,蒙版7为定制化装置。
73.透明密封袋704上可设置单向阀706,方便注入紫外胶705,后期磨平;也可采用采用注射,将紫外胶705注入透明密封袋704,再将缺口扎上或粘接密封。
74.蒙版7主要基于人体胸骨、锁骨等具有特异性的结构仿形制作,由于人体结构起伏差距不大,紫外胶705不必太多,紫外灯照射后一般能在几十秒到数分钟内快速凝固。
75.遮光膜702主要作用是防止人体被紫外线过度照射。
76.第一次使用固定盒1时就需要安装上蒙版7,后续每次需要ct扫描检查时,均带上,将人体自身坐标系与固定盒1中的坐标系管4建立联系,防止用于固定盒1相对于人体坐标变化而导致,整个环节坐标系传递链条断裂。
77.如图17,蒙版7另一种制作方式是,通过ct扫描直接将人体轮廓扫描得出数据模型,再根据数据模型3d打印出蒙版7。
78.实施例2:
如图1-3中,一种基于大地坐标系的医学影像学坐标校正系统,包括固定盒1,还设有可摆动的坐标系管4,坐标系管4与固定盒1连接,坐标系管4内设有造影剂;固定盒1上还设有可转动的标定板5,标定板5上设有十字刻线6,坐标系管4与标定板5连接;还设有可转动的展板架3,展板架3用于固定组织模型,展板架3上设有倾角传感器303。
79.优选的方案中,还包括可摆动的摆动器2,摆动器2设有中空套管202,中空套管202下端设有重锤201,坐标系管4设在标定板5内,标定板5下端设有插杆,标定板5的插杆插入中空套管202中。
80.固定盒1上端设有球铰座203,摆动器2套在球铰座203中。
81.标定板5可自转。
82.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1